
- 1mysql in条件值是以逗号分隔的字符串,如何处理_mysql in 字符串 逗号分隔
- 2linux查看防火墙状态及开启关闭命令_linux查看防火墙状态找不到命令
- 3*号的三个用途_代码*作用
- 4鸿蒙HarmonyOS实战-Stage模型(概述和组件配置)_鸿蒙 stage模式
- 5QGIS编译(跨平台编译)056:PDAL编译(Windows、Linux、MacOS环境下编译)
- 6java计算机毕业设计基于springboo+vue的房产出租销售门户网站(房屋租赁系统源代码+数据库+Lw文档)_vue门户网站源码
- 7AndroidAutoLayout--屏幕适配终结者_com.zhy:autolayout下载
- 8【热点资讯】交通银行 RPA+AI 全布局_交通银行rpa数量
- 9Jetson Nano b01安装qt_jetson orin安装qt creactor
- 10aspectj's load-time instrumentation_weaveinfo join point 'method-execution(void com.ly
【计算机视觉】基础矩阵
赞
踩
一、外极几何
用两个相机在不同位置拍摄同一物体,两张照片中的景物有重叠部分,那么理论上这两张照片会存在一定的对应关系即外极几何。
外极几何示意图:

在上图中,PO1O2为极平面,O1、O2分别为相机的中心点,P为空间中一点,P在图像平面上的投影分别为p1、p2,照相机中心之间的基线O1和O2与图像平面交于外极点e1、e2。
而对极几何则是描述极点、极平面、极线这几个量之间的对应关系。
二、基础矩阵 F
1.基础矩阵原理
为了描述对极几何,引入基础矩阵F。对于一幅图像上的点x(图上p1),在另一幅图像上存在对极线l’,并且在第二幅图像上,与x匹配的点x’(点p2)必然在l’上。为了表示x与l’关系,我们令基础矩阵F定义为: l′=Fx。
假设第一幅图到第二幅图之间存在单应性变换H,则 x′=Hx。
又因为l’是表示过对极点e2和图像点x’的直线,可以表示为: l′=e2×x′=[e2]xx′=[e2]xHx。
所以可得 F=[e2]xH。
其中e′=[a1,a2,a3]Te′=[a1,a2,a3]T,则它的反对称阵定义为: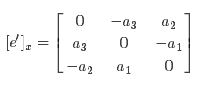
在已知两个摄像机的射影矩阵P和P’时,对于图像上的一点x,可以得到其反投影射线方程为: X(λ)=P+ x+λC
其中P+ 是P的伪逆,即PP+ = I,C为摄像机中心。射线上的两点:P+ x(当λ=0)、C(当λ=∞)在第二个摄像机P’拍摄下,在第二幅视图上的点分别为P′P+ 和P′C,这两点过对极线l’,即 l′=(P′C)×(P′P+ x)=[e′]x(P′P+ )x
可以推得 F=[e′]xP′P+
2.基础矩阵性质
(1) 基础矩阵是秩为2、自由度为7的齐次矩阵。
(2)若x与x’是两幅图上的对应点,那么x′TFx=0。
(3)l’是对应于x的对极线,l′=Fx。
(4)若e是第二个摄像机光心在第一幅图像上的极点,那么Fe=0 。
3.基础矩阵估算方法
3.1 八点估算法
基本矩阵是由该方程定义的: x′TFx=0
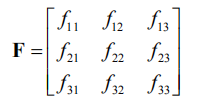
其中x↔x′是两幅图像的任意一对匹配点。由于每一组点的匹配提供了计算F系数的一个线性方程,当给定至少7个点(3×3的齐次矩阵减去一个尺度,以及一个秩为2的约束),方程就可以计算出未知的F。我们记点的坐标为x=(x,y,1)T,x′=(x′,y′,1)T
又因为F为:
所以可得到方程:
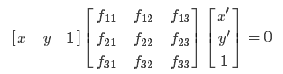
即相应方程式为

给定n组点的集合,我们有如下方程:
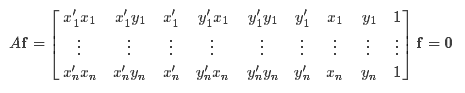
如果存在确定(非零)解,则系数矩阵A的秩最多是8。由于F是齐次矩阵,所以如果矩阵A的秩为8,则在差一个尺度因子的情况下解是唯一的。可以直接用线性算法解得。
如果由于点坐标存在噪声则矩阵AA的秩可能大于8(也就是等于9,由于A是n×9的矩阵)。这时候就需要求最小二乘解,这里就可以用SVD来求解,f的解就是系数矩阵A最小奇异值对应的奇异向量,也就是A奇异值分解后A=UDVT中矩阵V的最后一列矢量,这是在解矢量f在约束∥f∥下取∥Af∥最小的解。以上算法是解基本矩阵的基本方法,称为8点算法。
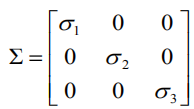
上述求解后的F不一定能满足秩为2的约束,因此还要在F的基础上加以约束。通过SVD分解可以解决,令F=UΣVT,则
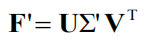
因为要秩为2,所以取最后一个元素设置为0,则
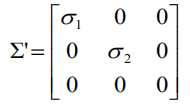
最终的解
3.2 RANSAC随机取样一致法估算(略)
三、基础矩阵代码实现
1.相关代码
from PIL import Image
from numpy import *
from pylab import *
from PCV.geometry import camera
from PCV.geometry import homography
from PCV.geometry import sfm
from PCV.localdescriptors import sift
from PCV.tools import ransac
import numpy as np
# Read features
im1 = array(Image.open('pic1.jpg'))
sift.process_image('imim1.jpg', '- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13

