
- 1SQLlite操作指南_sqllite使用
- 2Windows:cmd(或DOS)中常用的命令(下)_cmd命令date命令
- 3布隆过滤器(Bloom Filter)、布谷鸟过滤器(Cuckoo Filter)、商过滤器(quotient filter)(持续更新~~~~)
- 4mysql DDL 建表语句结构导出到EXCEL_ddl语句转成excel
- 5oracle数据库回滚操作,执行撤销_oracle撤回上一条
- 6【华为OD】C卷真题 100分:密码解密 Python代码实现[思路+代码]_给定一段密文字符串s,其中字符都经过密码本
- 7Java实现office办公文档在线预览(word、excel、ppt、txt等)_java实现文件预览编辑功能
- 8所谓云原生应用的概念理解_云基(cloud-based)应用,云原生(cloud-native)应用
- 9Python经典实例:约瑟夫生者死者小游戏_30个人在一条船上需要15人下去数到9的下船
- 10如何从GitHub上下载一个项目中的单个文件或者子文件夹_windows github怎么下载一个文件夹
Halcon标定系列(4):一文详解手眼标定之九点法_halcon九点标定
赞
踩
所谓手眼系统,就是人眼镜看到一个东西的时候要让手去抓取,就需要大脑知道眼镜和手的坐标关系。如果把大脑比作B,把眼睛比作A,把手比作C,如果A和B的关系知道,B和C的关系知道,那么C和A的关系就知道了,也就是手和眼的坐标关系也就知道了。 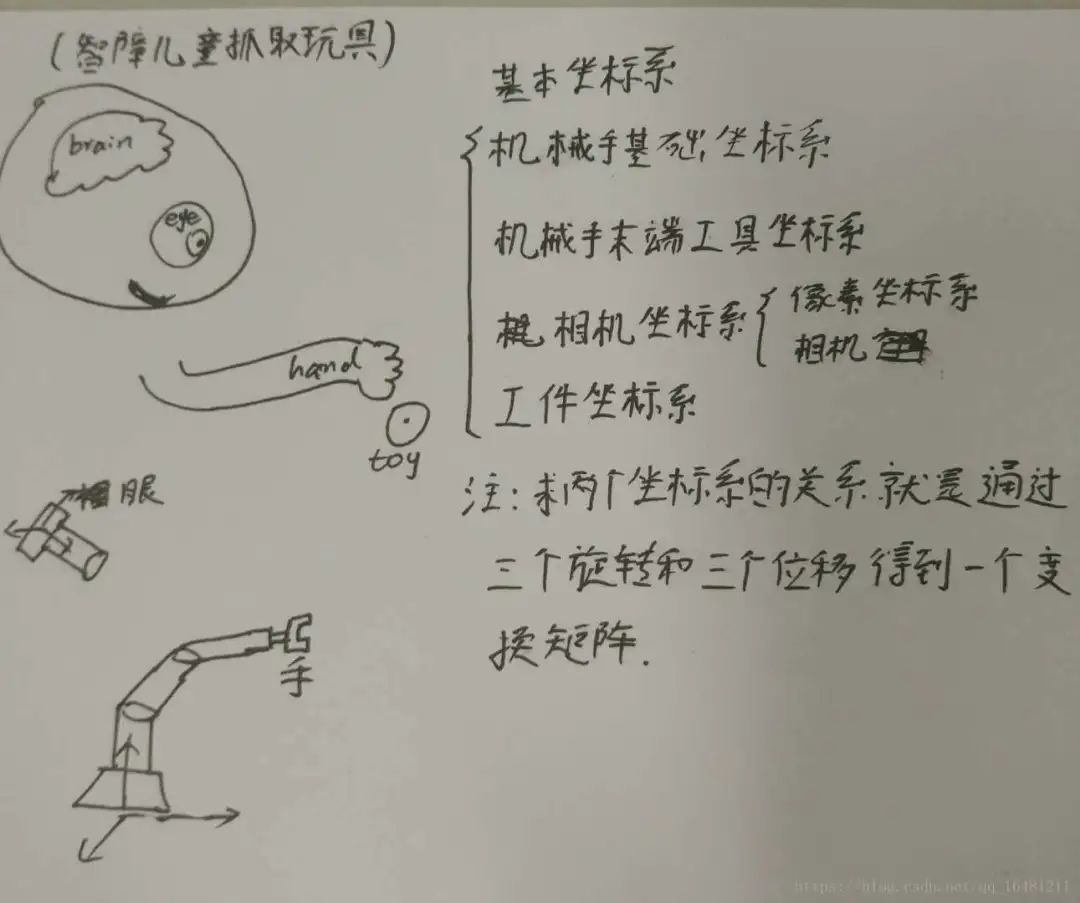
相机知道的是像素坐标,机械手是空间坐标系,所以手眼标定就是得到像素坐标系和空间机械手坐标系的坐标转化关系。
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
常用的标定方法有:九点标定
九点标定:
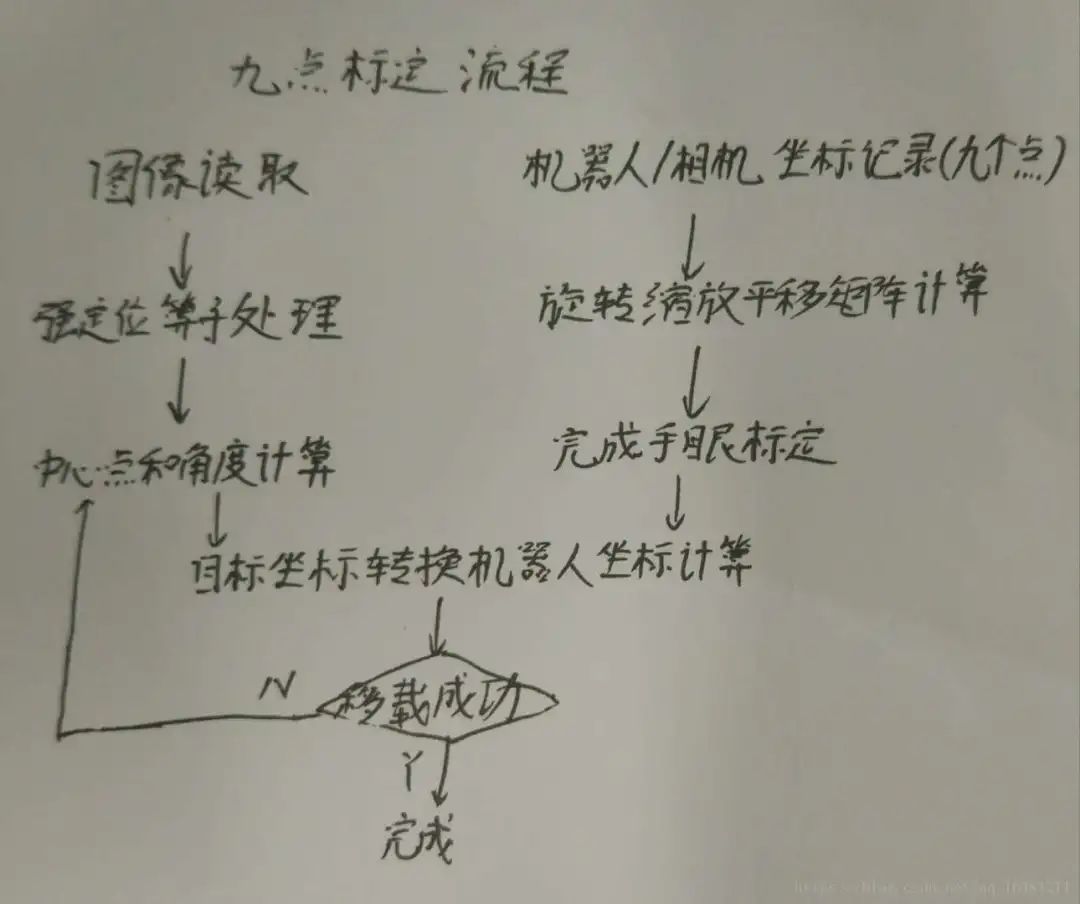
九点标定直接建立相机和机械手之间的坐标变换关系。
让机械手的末端去走这就9个点得到在机器人坐标系中的坐标,同时还要用相机识别9个点得到像素坐标。这样就得到了9组对应的坐标。
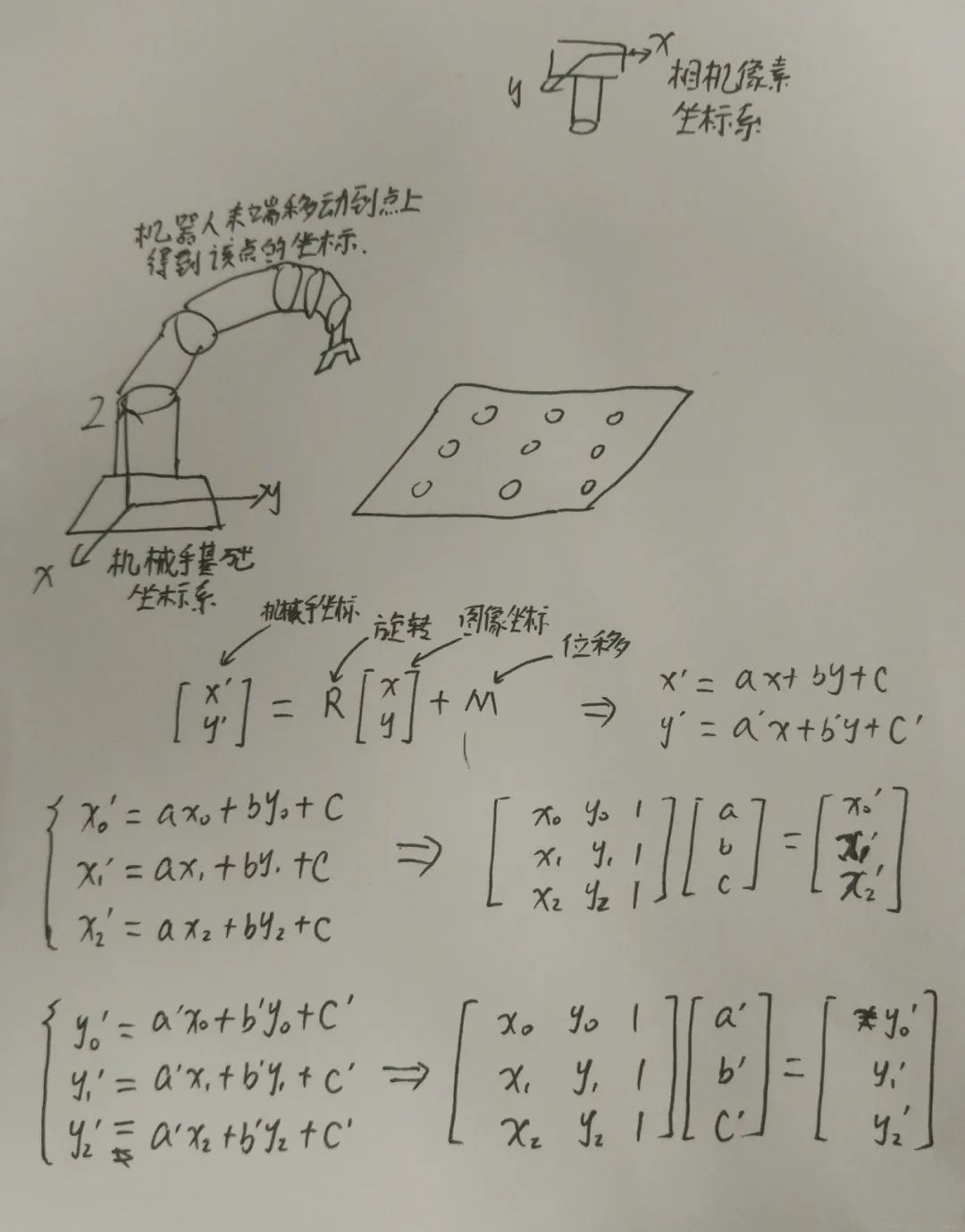
由下面的式子可知至少需要3个点才能求出标定的矩阵。
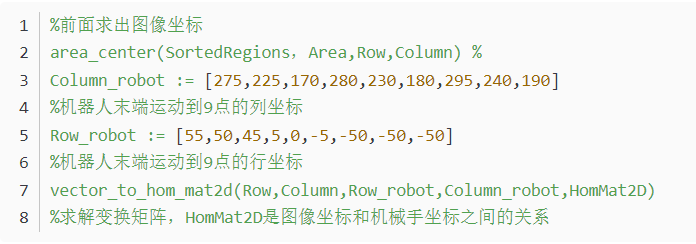
(1)、标定,Halcon中进行9点标定的算子
(2)、求解

一些特殊情况的解释:
眼在手外
有些情况中我们看到相机固定在一个地方,然后拍照找到目标,控制机械手去抓取,这种就很好理解。我们也叫做eye-to-hand
眼在手上
还有一种情况是相机固定在机械手上面,这种情况的标定过程实际上和相机和机械手分离的标定方法是一样的,因为相机拍照时,机械手会运动到相机标定的时候的位置,然后相机拍照,得到目标的坐标,再控制机械手,所以简单的相机固定在末端的手眼系统很多都是采用这种方法,标定的过程和手眼分离系统的标定是可以相同对待的。我们也叫做eye-in-hand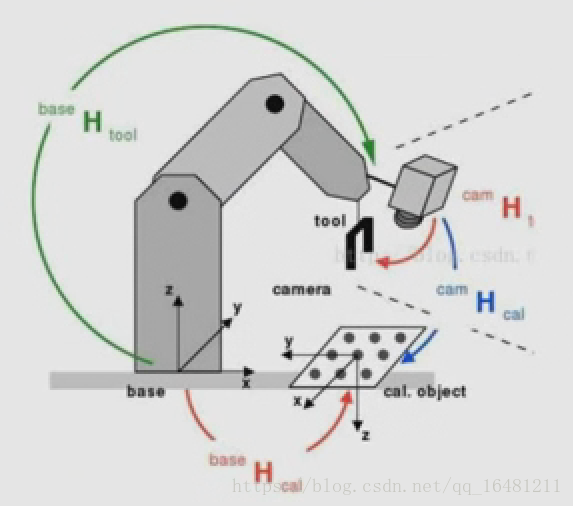

Halcon里的9点标定
https://blog.csdn.net/elie_yang/article/details/106315448
所谓“标定”就是为了得到数学里的一个矩阵关系。空间中一点(x,y,z) 到空间中另外一点(x1,y1,z1)可以经过平移,旋转重合。
这个平移和旋转的过程(仿射变换)被记录在矩阵关系中(齐次矩阵)。
例如下面简单的Halcon代码(二维变化)
- hom_mat2d_identity (HomMat2DIdentity)
- tx:=20
- ty:=30
- * 平移20,30像素
- hom_mat2d_translate (HomMat2DIdentity, tx, ty, HomMat2DTranslate)
- * 旋转90度
- angle:=rad(90)
- hom_mat2d_rotate (HomMat2DTranslate, angle, 0, 0, HomMat2DRotate)
-
- *计算点(20,30)经过上面的平移旋转后的坐标点(-60,40)
- affine_trans_point_2d (HomMat2DRotate, 20, 30, Qx1, Qy1)

请注意,齐次矩阵作为元组逐行存储;最后一行不存储,因为它对于描述仿射变换的所有齐次矩阵都是相同的。 因此,Hom Mat2DIdentity被存储为元组[1,0,0,0,1,0]。
标定的目的就是为了得到上面代码里的 HomMat2DRotate。有了这个变换矩阵,再给定一个点,就可以得到相同变化后目标点(Qx1,Qy1)
常见的标定有:九点标定和标定板标定。
九点标定
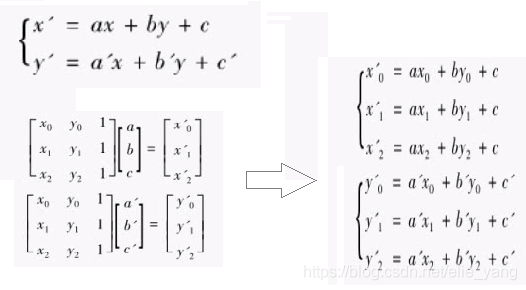
原理:简单来理解,假如有人告诉你A坐标系(例如相机图像坐标系)的一点(x=10,y=20像素),在B坐标系(例如机械手所在坐标系)里看到的是(x1=2,y1=4), 接下来,他问你如果是(x'=20,y'=30)在B里看到的是多少呢?
此时会有无数种答案,但如果给定更多的限制条件,例如更多的点(3个以上)在A、B坐标系的对应关系被找到,此时再来问(x'=20,y'=30)在B里看到的是多少,则答案就是唯一的。
为何有要求3个点以上,就是求解三元一次方程的要求至少有3个已知条件。9点标定是为了提高精度。
标定的行为就是完成上面的发现更多点的对应关系,已知A坐标系的一些点(x,y),在B坐标系里去行走或视觉识别得到(x',y')。
然后通过求解(x,y)到(x',y')的关系,得到仿射变换齐次矩阵。
实例:
- *已知A坐标系的9个点
- Ax:=[-30,0,30,-30,0,30,-30,0,30]
- Ay:=[30,30,30,0,0,0,-30,-30,-30]
-
- *待识别的B坐标点,和上面的A坐标系点一一对应
- Bx:=[]
- By:=[]
- for Index := 1 to 9 by 1
- dev_display (Image)
- * 以下过程为在B坐标系找A中的9个点
- draw_rectangle1 (200000, Row1, Column1, Row2, Column2)
- gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
- reduce_domain (Image, Rectangle, ImageReduced)
- binary_threshold (ImageReduced, Region, 'max_separability', 'light', UsedThreshold)
- connection (Region, ConnectedRegions)
- select_shape (ConnectedRegions, SelectedRegions, 'roundness', 'and', 0.7, 1)
- select_shape (SelectedRegions, SelectedRegion2, 'rb', 'and', 32, 100)
- fill_up (SelectedRegions, RegionFillUp)
- *找到了B坐标系的点(Row,Column)
- area_center (RegionFillUp, Area, Row, Column)
- Bx:=[Bx,Column]
- By:=[By,Row]
- endfor
- *得到目标变换矩阵HomMat2D
- vector_to_hom_mat2d (Bx, By, Ax, Ay, HomMat2D)
-
-
- *保存变换矩阵
- serialize_hom_mat2d (HomMat2D, SerializedItemHandle)
- open_file ('my_vector.mat', 'output_binary', FileHandle)
- fwrite_serialized_item (FileHandle, SerializedItemHandle)
- close_file (FileHandle)
-
- stop ()
- *读取变换矩阵,测试
- open_file ('my_vector.mat', 'input_binary', FileHandle)
- fread_serialized_item (FileHandle, SerializedItemHandle)
- deserialize_hom_mat2d (SerializedItemHandle, HomMat2D_9p)
- close_file (FileHandle)
-
- tx:=20
- ty:=30
- affine_trans_point_2d (HomMat2D_9p, tx, ty, Qx, Qy)


