
热门标签
热门文章
- 1web server apache tomcat11-17-default-servlet
- 2MMagic调试(训练)dreambooth_dreambooth数据集
- 3国密算法介绍
- 4Git分布式版本控制工具----代码托管(包含IDEA中使用)_idea git托管
- 5MongoDB安装教程—Ubuntu_ubuntu安装mongodb
- 6Linux:退出vim编辑模式_linux强制保存退出vim
- 7LLaMA-Factory微调(sft)ChatGLM3-6B保姆教程_llama-factory 微调chatglm3-6b
- 8使用阿里云镜像加速Rust与Cargo安装及更新_rust 阿里云 jingxiang
- 9【无标题】一、Pycharm上传本地代码到github 1、点击左上角的File,选择Settings,然后选择Version Control,点击出现的GitHub,点击“Add account”。_pycharm add gitlab account
- 10LSTM预测算法(股票预测 天气预测 房价预测)
当前位置: article > 正文
自动驾驶控制算法系列——三个坐标系与运动方程_自然坐标系是frenet坐标系吗
作者:很楠不爱3 | 2024-04-22 08:00:09
赞
踩
自然坐标系是frenet坐标系吗
鄙人初入自动驾驶行业,目前还处于迷茫阶段。入行以来也看过不少资料,但总是感觉不清晰,有幸看到up主:忠厚老实的老王的自动驾驶控制算法系列视频讲解,感觉讲得很清楚,为了便于回顾,在csdn中进行记录。接下来,就开始我们的学习吧 ,初次记录请多观照!
自动驾驶汽车控制主要通过两个方面进行:
纵向控制:油门/刹车—>力—>加速度—>速度—>位置
横向控制—>方向盘—>前轮转角—>横向位移
—>航向角
一、三个坐标系
在自动驾驶技术中主要使用三个坐标系:一是绝对坐标系(X,Y)(大地坐标系);二是车身坐标系(x,y);三是自然坐标系(Frenet坐标系)
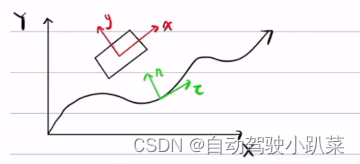
注意:本文所指坐标系定义均为右手坐标系。一般物理学、数学都使用右手坐标系,而计算机图像/视觉多用左手坐标系。
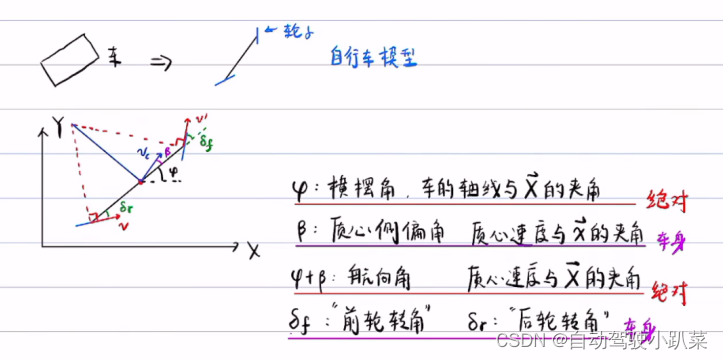
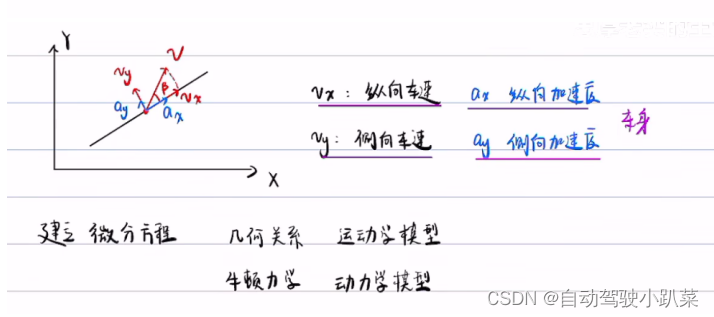
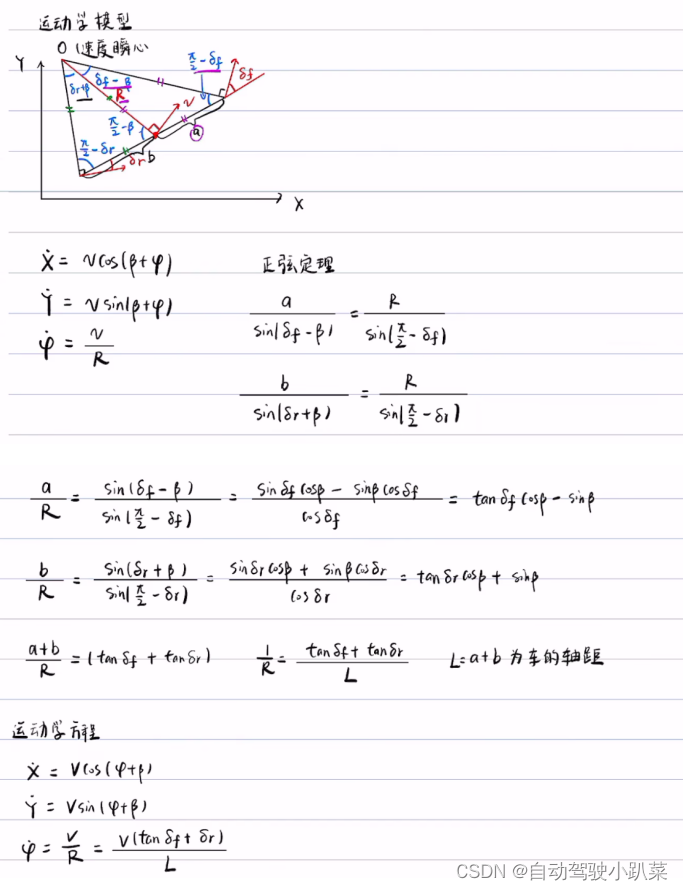
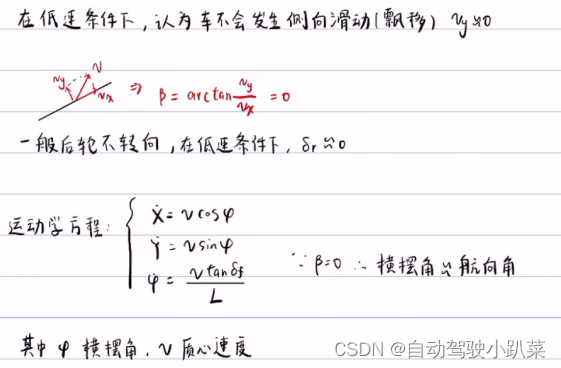
二、运动学方程
以自行车模型为例简化建立车辆模型如下:
总结
三个坐标系与运动学方程是车辆控制的基础,一切控制基于此进行。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/很楠不爱3/article/detail/467588
推荐阅读
相关标签

