
- 1每日一练 | 华为认证真题练习Day3_下图所示的两台交换机都开启了 stp 协议,某工程师对此网络做出了如下结论,你认为
- 2eclipse连接数据库(基础)
- 3人类社会的进化_社会进化实例
- 4Vue——快速上手_vue 快速上手
- 5JavaWeb新留言板系统 23年4月原创_文心一言
- 6一个比较齐全的汉字字库对应拼音 操作实现 _v匕乊
- 7工具篇-Mac上搭建本地svn服务器以及使用Cornerstone进行本地版本控制
- 8win10中如何让python服务开机自启动_win10 python服务开机重启
- 9云计算的含义
- 10SpringBoot+elasticsearchTemplate实现es索引数据的创建查询删除_springboot es withsearchtemplate
【基于gcc】手把手教你移植RT-Thread到STM32_gcc工具移植rtthread
赞
踩
前言
网上大多数移植RT-Thread系统的教程都是基于Keil的,下面将带来基于gcc版本的移植教程,若你还没有基于gcc的环境,可以查看我的这篇文章:VSCode搭建STM32开发环境
1、下载RT-Thread源码
RT-Thread有好几个版本,我们只需下载 RT-Thread Nano 版本源码即可,Nano是Master的精简版,去掉了一些组件和各种开发板的BSP,保留了OS的核心功能,下载地址:RT-Thread Nano
下载完成后,解压一下,会有一些内容:
文件夹内容组成:
| 文件夹 | 描述 |
|---|---|
| bsp | 板级支持包 |
| components/finsh | RT-Thread组件 |
| include | 头文件 |
| include/libc | 头文件 |
| libcpu | 与处理器相关的接口文件 |
| src | RT-Thread内核源码 |
2、将文件夹rt-thread拷贝到裸机工程模板中
这里我默认你们看这篇教程了:VSCode搭建STM32开发环境
将rt-thread文件夹拷贝到模板工程中
3、删除多余文件
打开rt-thread文件夹,将以下无用文件删除
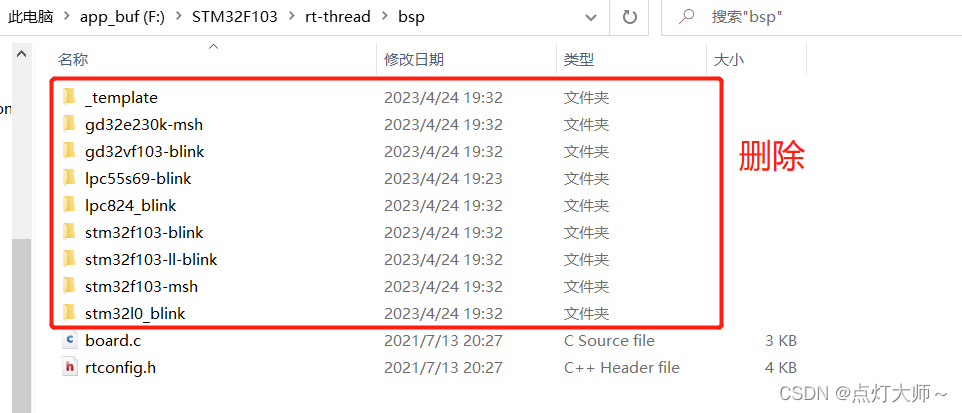
3.1、bsp文件夹
打开bsp文件夹,会发现里面有很多文件,这个文件夹下放的是一些板级支持包,能用到的文件只有board.c 和 rtconfig.h 两个文件,其他的都删除
3.2、 components文件夹
在这个文件夹下放的是一些其它第三方加进来的软件,也即是组件,比如gui、fatfs、lwip和finsh等。目前nano版本只放了finsh,其它的都被删除了,master版本则放了非常多的组件。finsh是RT- Thread组件里面最具特色的,它通过串口打印的方式来输出各种信息,方便我们调试程序。这个文件夹中的内容不做任何操作
3.3、docs文件夹
在这个文件夹里面有一个 docs.txt 文件,里面的内容是一些资料的网站,可以直接删除该文件夹docs
3.4、 include文件夹
include目录下面存放的是RT-Thread内核的头文件,是内核不可分割的一部分。
3.5、libcpu文件夹
在这个文件夹中放的是一些硬件接口,Nano版本里面放的有 arm系列芯片接口 、risc-v系列芯片接口,本实验是基于STM32F103的,所以 risc-v文件夹直接删除,再打开arm文件夹后,后发现里面也有好多文件夹,基本上是arm系列常见的架构,STM32F103是基于 cortex-m3内核的,所以我们将cortex-m3文件夹移动到 libcpu文件夹,其他的都删除。

3.6、 src文件夹
src目录下面存放的是RT-Thread内核的源文件,是内核的核心
4、修改Makefile
使用VSCode打开这个工程,接着打开Makefile
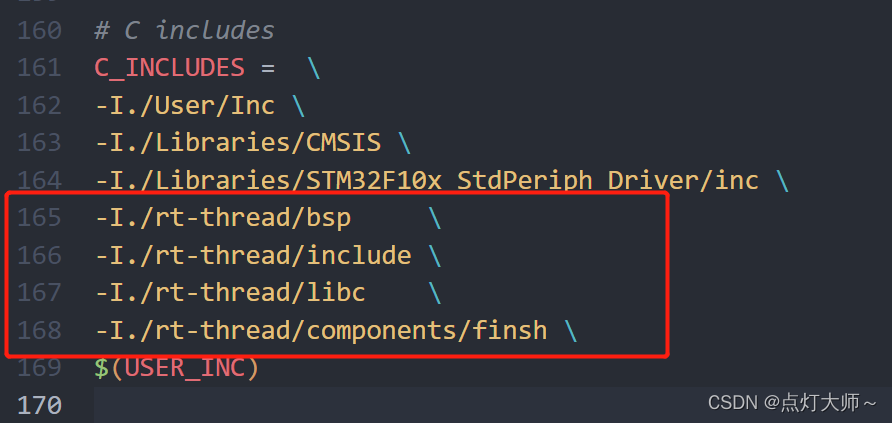
4.1、添加头文件路径
在头文件包含(C_INCLUDES)后面加入rt-thread源码中的头文件
# C includes
C_INCLUDES = \
-I./User/Inc \
-I./Libraries/CMSIS \
-I./Libraries/STM32F10x_StdPeriph_Driver/inc \
-I./rt-thread/bsp \
-I./rt-thread/include \
-I./rt-thread/libc \
-I./rt-thread/components/finsh \
$(USER_INC)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
如下图:
4.2、添加源文件.c
定义一个变量用来存放rt-thread的源文件路径:
# rt-thread源码
RTT_SOURCE = \
$(wildcard ./rt-thread/bsp/*.c) \
$(wildcard ./rt-thread/libcpu/cortex-m3/*.c) \
$(wildcard ./rt-thread/src/*.c)
- 1
- 2
- 3
- 4
- 5
在Makefile的变量 C_SOURCES 后面加入变量 RTT_SOURCE:

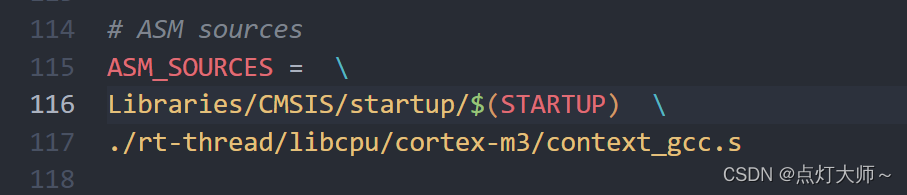
4.3、添加接口文件.s
本教程是基于gcc的,所以我们使用的是 context_gcc.S 文件,找到Makefile中的变量 ASM_SOURCES ,在它后面添加 context_gcc.S 文件,再添加之前,将文件context_gcc.S 的 大S后缀更改为小写s:
此时Makefile已经修改完成,下面将进行修改工程中的C文件。
5、修改工程代码
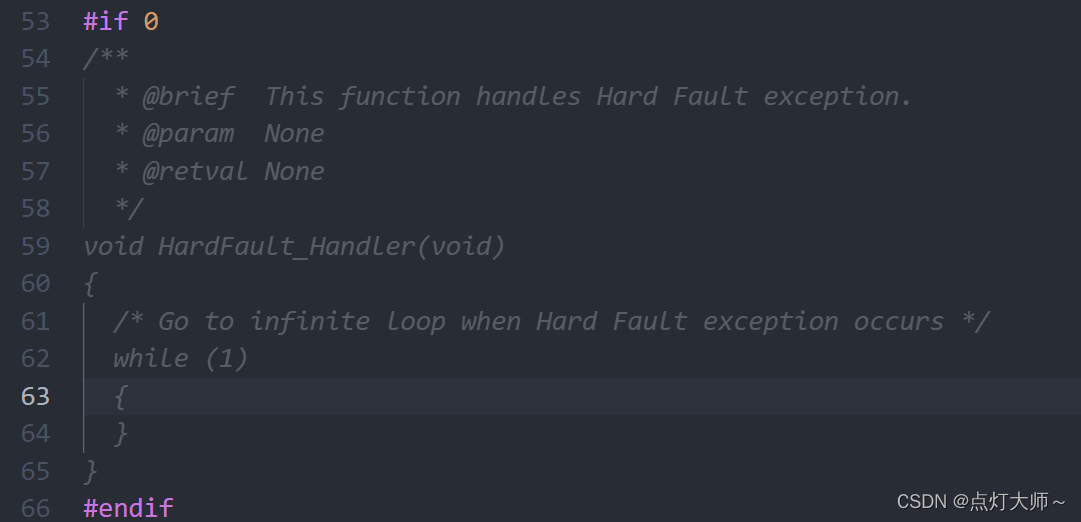
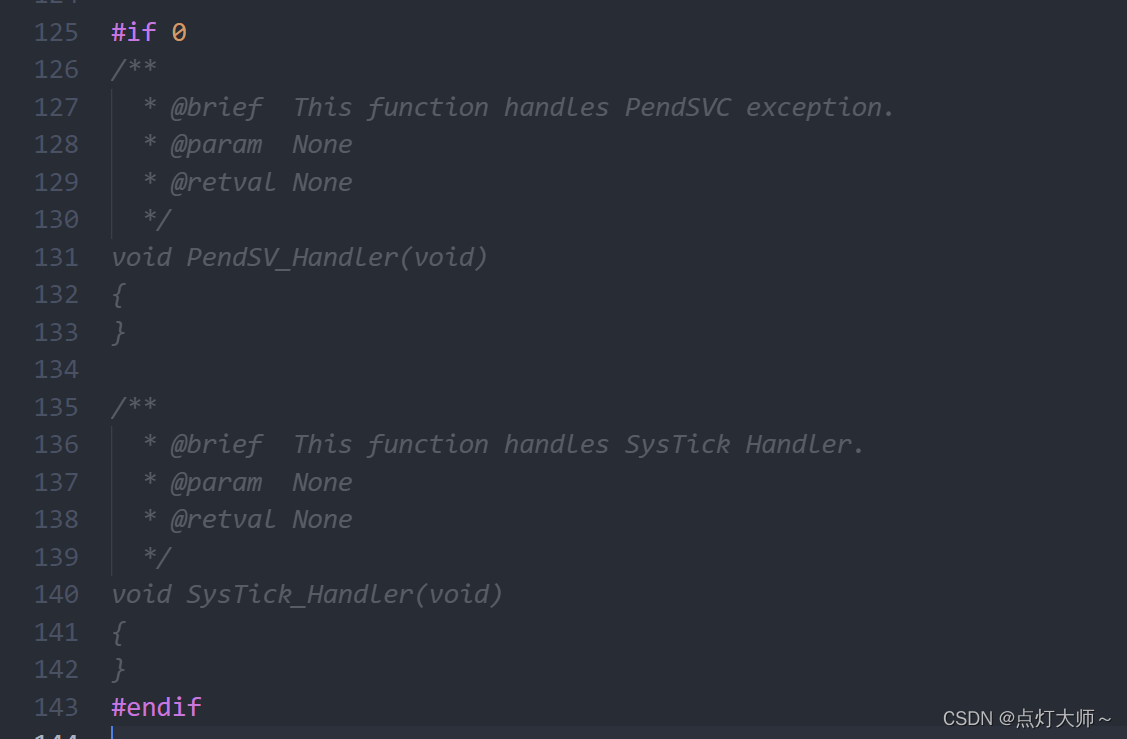
5.1、修改 stm32f10x_it.c 文件
此时,我们可以使用make命令构建一下此工程,构建结束后会报3个错误:
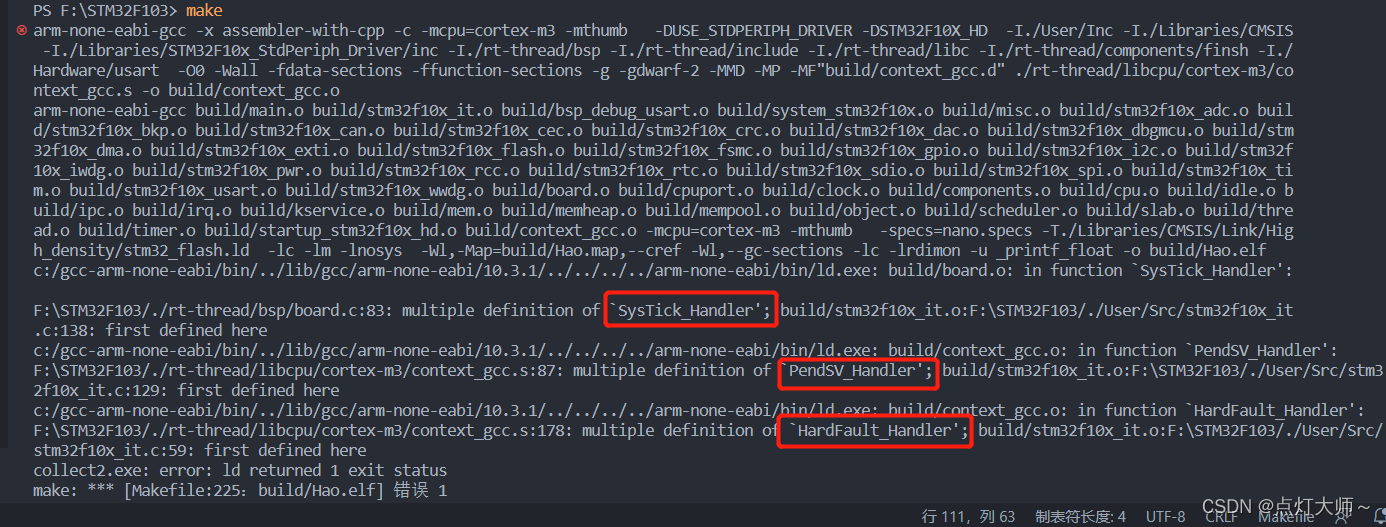
SysTick_Handler、PendSV_Handler、HardFault_Handler这三个函数重复定义,因为在接口文件 context_gcc.S 中已经实现了,此时应该将 stm32f10x_it.c 中的这三个中断处理函数屏蔽掉。
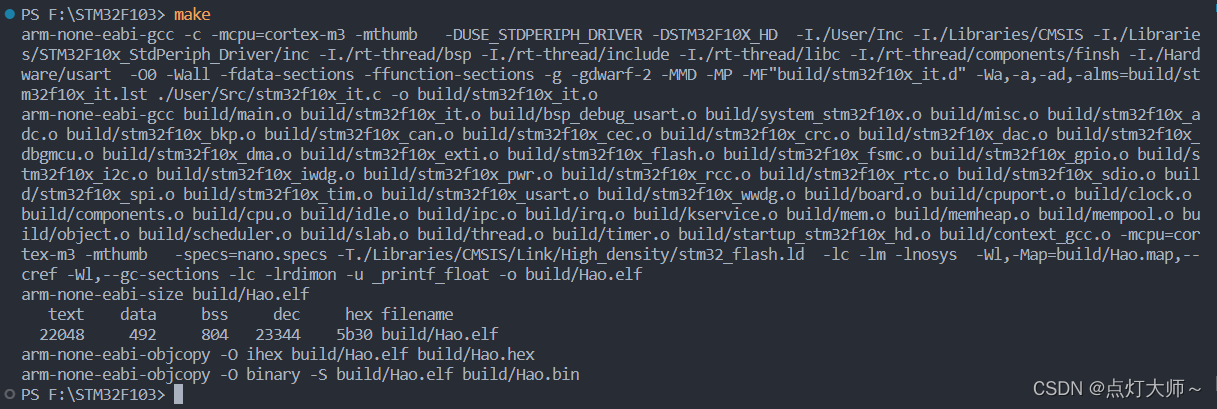
现在我们再使用make指令构建一下会发现可以正常编译了:
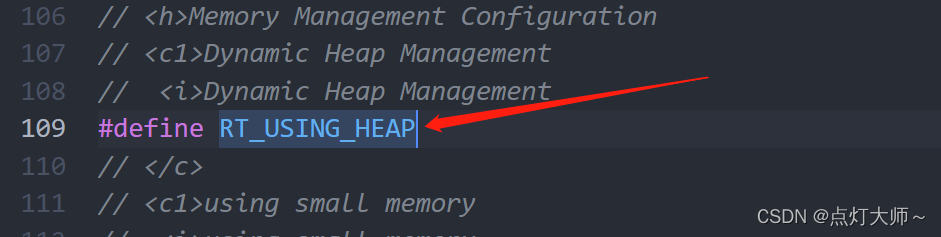
6、测试RT-Thread
接下来用动态线程的创建方法,而系统默认的是静态创建方法,所以先要修改配置文件,打开rtconfig.h 文件,使用搜索功能搜索 RT_USING_HEAP ,并将这个宏取消注释:
接着在 main.c 加入以下内容:
#include "stm32f10x.h" #include "bsp_led.h" #include <rthw.h> #include "rtthread.h" /* 定义线程控制块 */ static rt_thread_t led_thread = RT_NULL; /* ************************************************************************* * 函数声明 ************************************************************************* */ static void led_thread_entry(void* parameter); int main( void ) { /* LED 端口初始化 */ LED_GPIO_Config(); led_thread = /* 线程控制块指针 */ rt_thread_create( "led", /* 线程名字 */ led_thread_entry, /* 线程入口函数 */ RT_NULL, /* 线程入口函数参数 */ 512, /* 线程栈大小 */ 3, /* 线程的优先级 */ 20); /* 线程时间片 */ /* 启动线程,开启调度 */ rt_thread_startup(led_thread); } /* ************************************************************************* * 线程定义 ************************************************************************* */ static void led_thread_entry(void* parameter) { while (1) { LED_G(ON); rt_thread_delay(500); /* 延时500个tick */ LED_G(OFF); rt_thread_delay(500); /* 延时500个tick */ } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
重新构建后下载到开发板后,看一下效果。
呀,呀,呀,发现没有达到预期的效果,别着急,此时我们需要修改一下STM32的启动文件,根据
你自己的芯片型号选则:
在.s文件中将 bl main 修改为 bl entry:
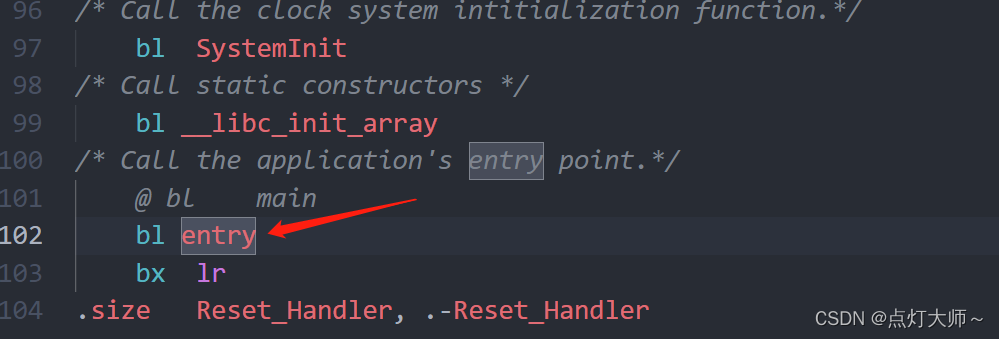
修改之后再重新构建一下并下载到开发板后,就会发现LED小灯闪烁。
本教程只做了一个简单的移植,后面应该还有很多细节需要处理,这里就不过多演示了
本篇文章所用的开发板是野火的指南者型号,想要移植好的工程,评论区见~


