
- 1Matlab程序入门GUI项目之二:简单科学计算器_matlab gui打包后 数据游标科学计数
- 2mac和iphone的接力失效,导致不能接力使用赋值粘贴功能的解决方案。_接力 不还用
- 3论文阅读:Text2Video: Text-driven Talking-head Video Synthesis with PhoneticDictionary_速推text2vidio
- 4使用ChatGPT面向岗位制作简历、扮演面试官_可以角色扮演面试官的cheatgtp
- 5TIM_CtrlPWMOutputs()的使用
- 6HarmonyOS学习路之开发篇—设备管理(设备标识符)_登录了相同的harmonyos帐号的多个分布式设备中,应用程序在某一设备上登录之后,可
- 7安装TI_MSP432库和导入CCS工程_我安装了mspware但是newccsproject里没有msp432 dricerlib,怎么添加
- 8[SaaS] AIGC营销创意应用方向
- 9实现(1)-----功能介绍和准备阶段_if09931eovx
- 10微搭Weda - 自定义代码访问数据库wedaGetRecords_tcberror: 调用数据源user_zyc5tkx方法wedagetrecordsv2失败: u
传感器概述_传感器 csdn
赞
踩
1.1 传感器的定义与作用
传感器、通信网络和控制计算机三者构成了工业自动化的信息体系,分别扮演着“感官”“神经”与“大脑”的角色,指挥着各种执行机构动作,共同构筑了各种类型的自动检测控制系统。
在工业控制利用信息的过程中,首要问题是获取各个环节与工序准确、可靠的信息,这就是传感器的使命。没有高精度的传感器提供准确及时的信息,计算机控制系统再完善,也无法提高工业自动化生产的水平。
电测量是一种较成熟的技术,而传感器通常是将非电量转换成电量后进行的间接(电)测量。
1.1.1 传感器的定义
”传感器“从字面上理解是传递感受敏感信息的器件。
根据GB 7665-87,传感器定义为:能感受规定的被测量并按照一定规律将被测量转换成可用信号的器件和装置。其含义主要有:
- 传感器是由敏感元件和转换原件构成的检测装置;
- 能按一定规律将被测量转换成电信号输出;
- 传感器的输出与输入之间存在确定的关系。
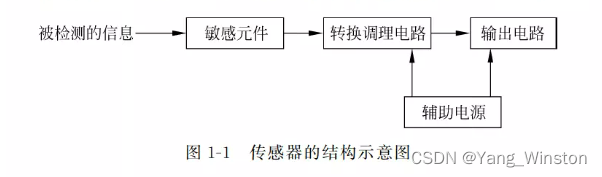
图1-1为传感器的结构示意图。其中,敏感元件直接感受和响应被测量的大小和变化,转换调理电路将敏感元件感受和响应的被测量信息转换或调理成适于传输和测量的电信号,输出电路再把转换后的电信号调整成便于判断、处理、显示、控制的标准电信号。转换调理电路有电桥、谐振、整流、滤波、放大、比较器等多种形式。敏感元件的工作需要一个系统为它服务,才能圆满地使最终的输出与输入之间存在确定的数量关系,这个系统常称为传感器系统。对于一个传感器,只有认识了它的整个系统,才能正确地应用它。
1.1.2 传感器在现代科学技术中的作用
日常生活中,人们使用着各种各样的传感器:电冰箱、电饭煲中有温度传感器;空调中有温度和湿度传感器;煤气灶中有煤气泄漏传感器;水表、电表、电视系统中有红外遥控传感器;照相机中有图像传感器;智能家居中有防火烟雾传感器和防盗红外传感器。
一辆轿车中有多达几十上百种传感器,如倒车雷达传感器,在倒车及出现追尾碰撞危险时,可提前发出警告;车速传感器,用于检测汽车行驶速度,能提醒司机进行速度控制,还能给其他部件提供速度信号;油、水液位传感器、温度传感器,监测发动机的运行参数;碰撞传感器在监测到强烈振动时,输出信号使安全气囊自动弹出保护司机;曲轴位置传感器测取配气相位,为精确点火时刻提供重要信息;节气门位置传感器可感应节气门位置,判断发动机处于加速、减速还是怠速工况。
在航空航天器和先进的新型武器装备上,更有高达上千种的传感器在工作。
在现代科学技术的各个领域中,传感器要对诸多非电量进行测量,有位移传感器、距离传感器、速度传感器、加速度传感器、压力传感器、振动传感器、流量传感器、物位传感器、温度传感器、湿度传感器、视觉传感器、气体传感器、物质成分传感器、食品鲜度传感器、浓度传感器等。这些传感器相当于人的眼(视觉)、耳(听觉)、鼻(嗅觉)、皮肤(触觉)、舌(味觉)。根据传感器的检测结果,计算机才能适时指挥控制系统中的控制机构和执行机构实现自动生产、精确管理与安全控制等。
1.2 传感器的分类
传感器的分类方法较多。在工业自动化领域中,传感器一般按物理原理或传感器的测量对象进行分类。
1.2.1 传感器按物理原理分类
传感器按物理原理分类有很多种,如电阻式传感器、电容式传感器、电感式传感器、光电传感器、压电晶体传感器、霍尔元件传感器、超声波传感器、激光传感器、电化学传感器、生物传感器、射频识别传感器等。
1.2.2 传感器按测量对象分类
在工业自动化检测与控制系统中,相同的测量对象可以采用不同物理原理的传感器测量。
1、力与加速度传感器
力是工业生产中常见的非电量,如拉力、压力、振动力、张力等。通过测量这些力的大小,可推知生产过程的进程、化学反应的程度、控制某些物理量的极限,还可间接测量该物体的加速度。
测量力的传感器种类较多,主要有金属电阻应变片、压阻式传感器、压电式传感器、电感式传感器、电容式传感器等。
2、位移传感器
位移包括线位移和角位移两种。在许多工业控制中都要准确确定工件位移的方向、大小及速度,确定工件相互间的距离。电阻式传感器、电容式传感器、电感式传感器等是早期用于位移测量的传感器。新型的位移传感器有光电码盘式传感器、光栅传感器、霍尔传感器、超声波传感器、陀螺仪传感器、射频识别传感器等。
3、速度传感器
运动物体的速度包括角速度和线速度两种,与之对应的有角速度传感器和线速度传感器,而线速度可以很方便地转换为角速度进行测量。
速度传感器主要有旋转发电式传感器、光电传感器、电感式传感器、激光传感器、雷达传感器、霍尔传感器、红外传感器等。
4、流量传感器
工业生产中将流动的液体、气体、粉粒状固体或三者之间的任意组合都称为流体,一般用管道或渠道进行输送。流量指单位时间流过管道或渠道某一横截面的流体量。
流量传感器主要有差压式流量传感器、涡衔流量传感器、容积式流量传感器、涡轮流量传感器、电磁式流量传感器和超声波流量传感器等。
5、温度传感器
几乎所有的工业过程、家用电器、医疗救治、科学研究、外空探测都关心温度这个非电量,所以温度传感器的应用及其广泛。
检测温度的传感器主要有热膨胀式传感器、金属热电阻传感器、热敏电阻传感器、热电偶传感器和热辐射式传感器等。
工业自动化中测量对象还有很多,如湿度、颜色、形状、亮度、浓度、成分等,这里不再一一介绍。
1.3 传感器的性能
传感器的原理、结构多种多样,其性能各具特点。同一种传感器可以用来测量不同的非电量,同一非电量也可以用不同的传感器测量。只有了解传感器的性能特征,才能正确选用它。传感器在测量时都会出现测量误差,其误差大小关系着测量的准确性。
1.3.1 传感器的测量误差
测量误差有不同的表达方式和分类,对于不同的误差有不同的消除方法。
1.测量误差根据产生的原因分类
1)基本误差
基本误差是指在传感器产品数据手册规定的工作条件下,即在规定的温度、湿度、放置方式、没有外电场和外磁场干扰等条件下,由于传感器本身的原理结构和制作工艺等方面不够完善而产生的误差。如传感器活动部分存在摩擦、零件装配不当、标尺刻度不准、原理非线性等引起的误差都属于基本误差,这种误差是传感器本身所固有的误差。
2)附加误差
附加误差是指测量条件偏离传感器产品数据手册规定的工作条件。如温度过高、湿度过大、参变量波形不稳、外界振动、外界电磁场影响等引起的误差都属于附加误差。
2.测量误差根据表示方法分类及传感器仪表的准确度等级
1)绝对误差
传感器输出的数值A和被被测非电量的真值A0之间的差值称为本次测量的绝对误差,用Δ表示为

被测量的真值可由准确度更高的标准测量器具提供。绝对误差是有大小、有正负且有单位的量。Δ为正时,传感器输出的数值偏大;Δ为负时,传感器输出的数值偏小。测量同一个量时,Δ的绝对值越小,测量的结果越准确。
被测非电量的真值可由上式变换后得到

式中,C为修正值。修正值和绝对误差相比,其大小相等、正负相反。工作传感器的修正值可由准确度等级更高的标准测量器具在对改传感器实施标定或校准后提供。
2)相对误差
测量大小不同的被测非电量时,用绝对误差不便于比较测量结果的准确程度,这时就要用相对误差进行比较。
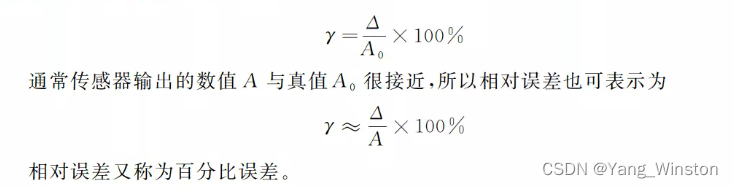
相对误差是绝对误差与被测量的真值之间的比值。相对误差只有大小和正负之分,而无单位,通常用百分数表示,即
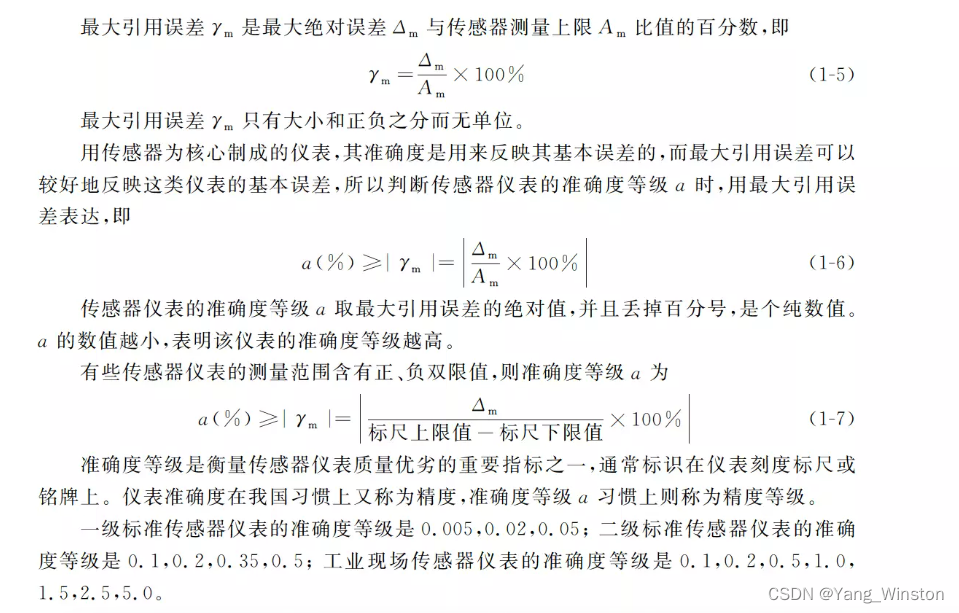
3)最大引用误差
同一传感器的绝对误差Δ在测量标度尺范围内变化不大,而由于测量输出值的读数本身A可能变化很大,所有同一传感器各输出读数点的相对误差会变化很大,因此用相对误差不便于评定传感器的准确度等级。如果用绝对误差Δ作分子,传感器的测量上限值作分母,由于测量上限值是常数,可以较好地反映传感器的基本误差。按这种方式表达的误差称为引用误差,其中最大的最大值称为最大引用误差。
1.4 传感器信号处理
传感器输出的信号,一般具有如下特点:
(1)多数是模拟信号,信号一般较微弱,如电压信号为电压微伏至毫伏级,电流信号为纳安至毫安级。
(2)由于传感器内部噪声(如热噪声、散粒噪声等)的存在,使输出信号与噪声混合在一起。当传感器的信噪比较小,而输出的信号又较弱时,信号会淹没在噪声之中。
(3)大部分传感器的输入-输出曲线呈线性或基本呈线性,但仍有少数传感器的输入-输出特性曲线是非线性的,或呈某种函数关系。
(4)外界环境会影响传感器的输出特性,其中主要是温度、电场或磁场的干扰等。
(5)传感器的输出特性与电源性能有关,一般需要采用恒压源或恒流源供电。
对于电阻式传感器,如应变式传感器、热电阻传感器、压阻式传感器等,需要通过调理电桥将电阻变化转换为电压信号,通过仪表放大器将该电压信号放大,还可以通过A/D转换器实现模拟量数字化,以便于信号传输、处理、显示等。
对于光电式传感器,如光电二极管,输出阻抗较高,需要前置放大器进行信号放大,放大器设计应满足低偏置电流、低噪声和高增益的要求。
受传感器原理、结构及安装位置的限制,所转变成的电量不但绝对值小,变化量也不大,而且带负载能力差。为了传感器系统信息处理、反馈控制的需要,通常将传感器敏感元件的输出信号进行调理,如放大、滤除噪声、电平转换,变成4~20mA的标准工业信号,这就要用到集成运算放大器和滤波器。完成信号变化(也称为二次变换)的电路称为传感器的调理电路。

