
机器人系统开发ros2-基础实践01-学会自定义一个机器人动作aciton实体类
赞
踩
您之前在了解操作教程中了解了action 。与其他通信类型及其各自的接口(主题/消息和服务/srv)一样,您也可以在包中自定义操作。本教程向您展示如何定义和构建可与您将在下一个教程中编写的action服务器和action 客户端一起使用的操作。
需要理解action 可以回到这篇文章
ros 中的通信接口的定义以及如何创建自定义msg、srv和action文件
1. 创建aciton 前端的先决条件
已安装ROS 2和colcon
- 1
设置工作区并创建一个名为的包action_tutorials_interfaces:
mkdir -p ros2_study/src
cd ros2_study/src
ros2 pkg create action_tutorials_interfaces
- 1
- 2
- 3
定义动作:
.action操作在以下形式的文件中定义:
# Request
---
# Result
---
# Feedback
- 1
- 2
- 3
- 4
- 5
action 定义由三个消息定义组成,以 分隔—。
-
请求消息从 动作客户端发送到发起新目标的 动作服务器。
-
当目标完成时,结果消息从动作服务器发送到动作客户端。
-
反馈消息 定期 从 动作服务器发送到动作客户端,其中包含有关目标的更新。
动作的实例通常称为目标。
假设我们要定义一个新的操作“Fibonacci”来计算斐波那契数列。
action在我们的 ROS 2 包中创建一个目录action_tutorials_interfaces:
cd action_tutorials_interfaces
mkdir action
- 1
- 2
在该目录中,创建一个包含以下内容的action文件:Fibonacci.action
cd action
vim Fibonacci.action
- 1
- 2
将下面内容贴到Fibonacci.action,然后保存
int32 order
---
int32[] sequence
---
int32[] partial_sequence
- 1
- 2
- 3
- 4
- 5
创建action
在我们的代码中使用新的斐波那契操作类型之前,我们必须将定义传递到 rosidl 代码生成管道。
这是通过在以下行CMakeLists.txt之前添加以下行来完成的:ament_package() action_tutorials_interfaces
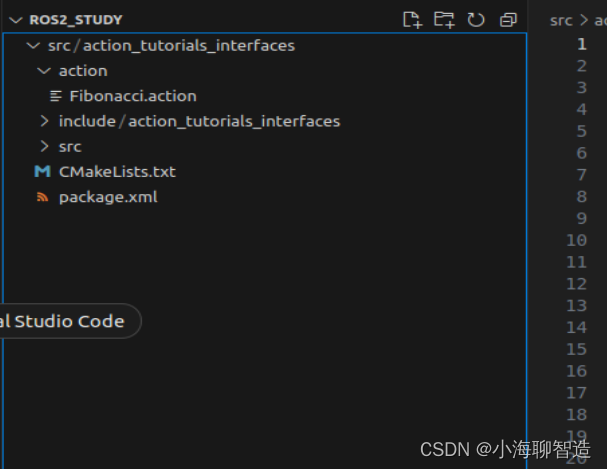
让我们用vccode 打开项目目录,方便查看文件以及修改文件
这是我们现在的项目目录如下:
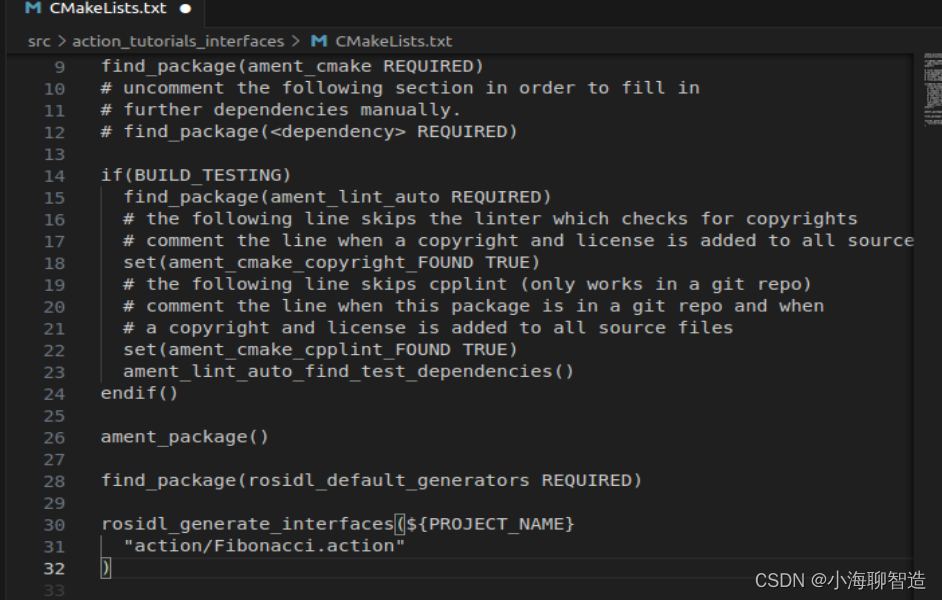
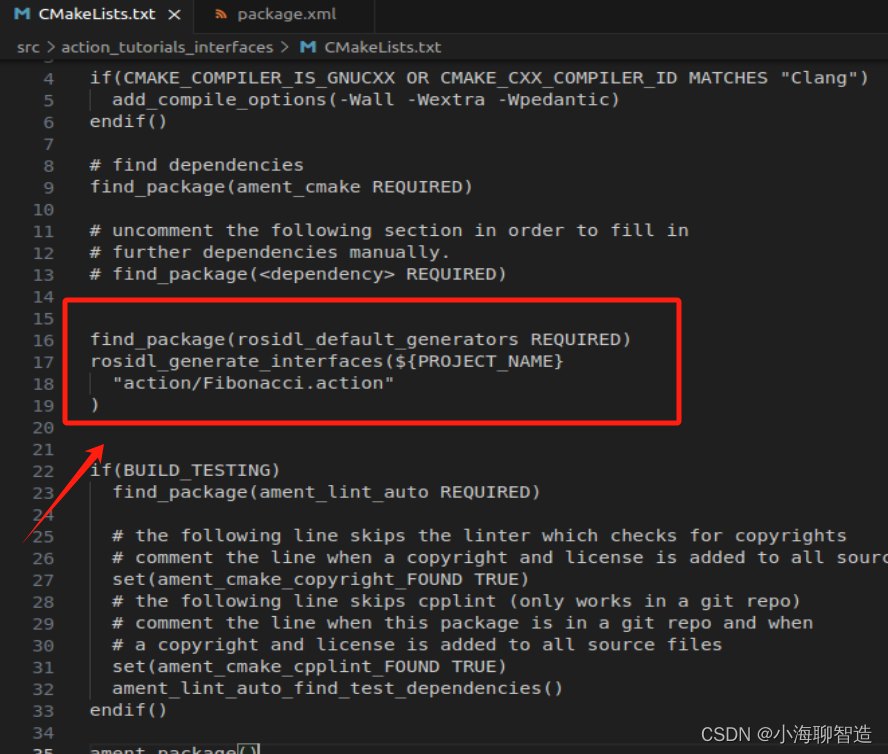
接下来我们修改CMakeLists.txt
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"action/Fibonacci.action"
)
- 1
- 2
- 3
- 4
- 5
我们还应该将所需的依赖项添加到我们的package.xml:
<buildtool_depend>rosidl_default_generators</buildtool_depend>
<depend>action_msgs</depend>
<member_of_group>rosidl_interface_packages</member_of_group>
- 1
- 2
- 3
- 4
- 5
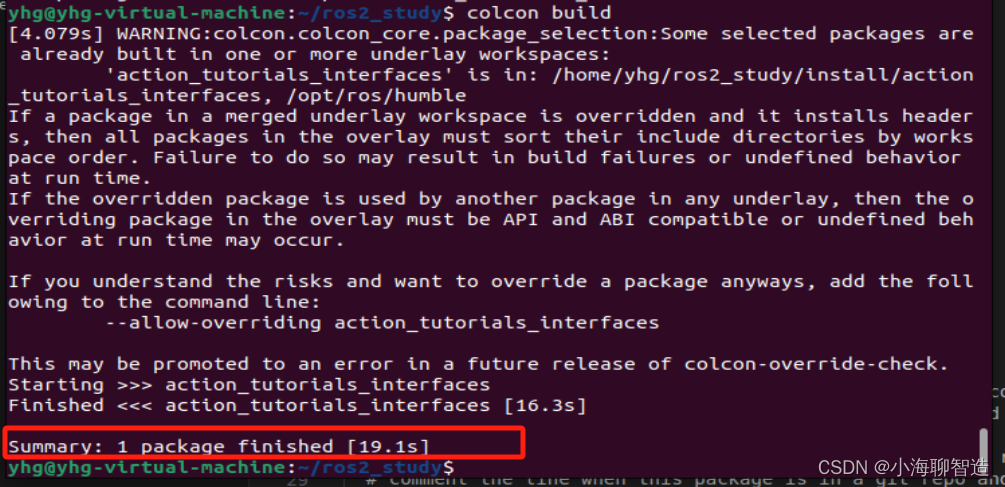
我们现在应该能够构建包含Fibonacci操作定义的包:
cd ros2_study
colcon build
- 1
- 2
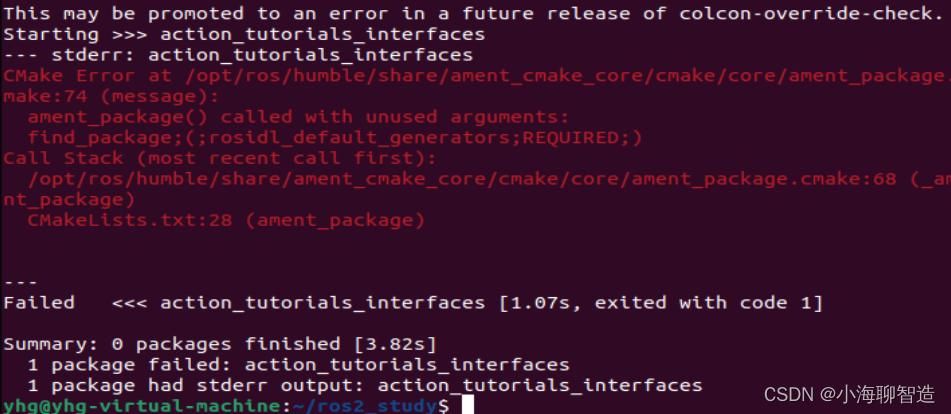
发现编译报错:
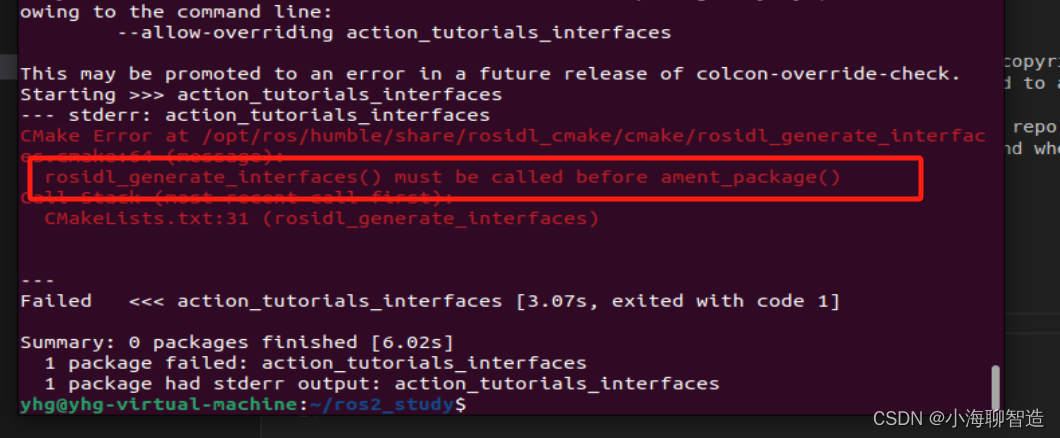
提示我们是代码位置放错了
重新将上面的代码放入到下图的这个位置然后再重新编译
编译成功:
验证我们定义的action
. install/setup.bash
# Check that our action definition exists
ros2 interface show action_tutorials_interfaces/action/Fibonacci
- 1
- 2
- 3

在本次学习中,我们学习了action 定义的结构。还学习了如何使用CMakeLists.txt和正确构建新的操作界面package.xml,以及如何验证构建是否成功。

