
- 1数据结构(三)算法
- 2想快速拿到大厂的高薪offer?这些Java面试题不要错过
- 3docker下的onlyoffice安装(for seafile)_docker安装seafile onlyoffice
- 4Stable-Diffusion 报错: no attribute ‘lowvram‘ 或not implemented for ‘Half‘_attributeerror: 'nonetype' object has no attribute
- 5数据库SQL字符串连接函数:CANCAT()_sql l连接符 cate
- 6Spring Cloud Alibaba 实现 gRPC 服务调用_springcloud alibaba grpc
- 7用加密方式实现用户登录
- 82023年第九届数维杯国际大学生数学建模挑战赛 A B C D 选题指导_2023年第九届数微杯c题
- 9idea学习系列三之版本管理工具_rearrange code
- 10NLP民工的乐园: 几乎最全的中文NLP资源库
NASA投资有远景技术,有望改变未来人类和机器人的勘探任务
赞
踩

来源: 机器人创新生态
据NASA官网报道,美国宇航局(NASA)正在投资有远见的技术概念,包括流星撞击探测、太空望远镜群以及细小轨道碎片测绘技术,这些技术将来可能被用于未来的太空探索任务中。
美国宇航局已经选出25个还处于早期的技术方案,它们有潜力改变未来人类和机器人的勘探任务,引进新的勘探能力,并显著改进目前建造和操作航天系统的方法。
2018年美国宇航局创新先进概念(NIAC)第一阶段涵盖了广泛的创新概念,它们将为未来的太空探索带来革命性的变化。第一阶段的奖金约为12.5万美元,主要支持对这些概念的初步定义和分析。如果这些基本的可行性研究取得成功,获奖者可以申请第二阶段奖金。
美国宇航局太空技术任务理事会的代理副署长吉姆·鲁特(Jim Reuter)说:“NIAC项目给了美国宇航局去探索有远见想法的机会,这些想法可以通过创造更好的或全新概念来改变未来的NASA任务,同时让美国的创新者和企业家们成为旅程中的伙伴。然后,我们可以评估这些概念,以便将其纳入我们早期的技术组合中。”
入选2018年NIAC第一阶段的重要概念如下:
1.变形金刚(Shapeshifter):从科幻小说成为科学事实,可探测土卫六的崎岖悬崖和深海世界

变形金刚是全新的系统概念,适用于进入有大气环境的天体。这个机器人平台能够跨领域移动,包括在大气层中飞行,在光滑的表面上滚动,在水面上航行(洞穴),漂浮在湖面上,或在水下推进。变形金刚个能够飞行的两栖机器人(FAR)。它由更小的机器人单位(每个被称为cobot)组成,结合成不同的移动模式。每个cobot都非常简单,最小的设计甚至只有几个螺旋桨作为执行器。
变形金刚可以变形为一个在水面上滚动的球,可以在水面上飞行和悬浮的飞行阵列,可以在水下空隙中移动的鱼雷结构。除了跨领域移动,变形金刚还可以转换成其他功能性系统来执行各种各样的任务,比如帮助运送巨大而沉重的物体,用最小的功耗穿越长距离,在难以进入的区域与地面建立通信网络等。
2.生物机器人(Biobot):为更有效探索而创新的宇航员辅助设备
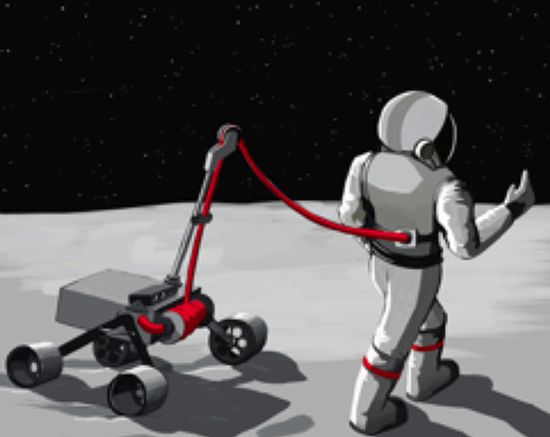
在为行星探索而设计的宇航服中,没有任何参数比“背部重量”更重要。宇航服系统的重量必须由穿戴者在月球或火星重力环境下支撑。宇航服和便携式生命维持系统(PLSS)的重量增加会影响穿戴者的运动水平,并最终限制了舱外活动(EVA)的持续时间,徒步行走的距离,以及探索任务取得的成果。很明显,如果宇航员不需要携带PLSS维持生命维持功能,行星表面的探测活动将会大大改善。与此同时,对人员机动性、进入和操作能力的额外限制将是不可接受的。
这个NIAC概念是通过应用先进的机器人系统来处理宇航员的生物需求,以解决这两个看似矛盾的问题。这一概念的设计参考场景是,参与未来月球或火星探测的宇航员将在月球表面停留数周或数月时间,而不是几天,并将参与常规的舱外活动操作。地质学家每星期都要花几天时间在舱外活动,在漫长的任务期间进行勘探,这并非不不可能,因为他们的目标远大于阿波罗登月任务。在这种情况下,每个宇航员将会有个生物机器人跟随,它将运送他们的生命维持系统和消耗品,通过延伸的脐带与宇航员相连。
宇航员将通过脐带连接到机器人,只携带小型的紧急开环生命支持系统即可,类似于每个PLSS中所包含的东西。机器人的移动底座将被设计成能够在宇航员行走的任何地方旅行,而且还可充当舱外活动工具、科学仪器和采集样本的运输工具,并有可能带着宇航员跳跃式行进。在未来的探索任务中,这种系统也将显著增强公众参与,因为机器人可以提供高分辨率的摄像头和高带宽的通信设备,为每个舱外活动的机组人员提供高清晰度的视频覆盖。
这一概念也有架构级的好处。例如,由于PLSS的负荷,为了使宇航服的重量减少到最小值,设计元素会经常被删除,从而造出更轻但更不灵活的外套。通过把生命维持系统和消耗品交给生物机器人,相对较轻的宇航服质量将增加机动性和易适应性,让穿戴着更加灵活。由于PLSS重量限制减轻,整个舱外活动系统可以很容易地适应更频繁的出行,更高容量的宇航员冷却系统,或更高水平的冗余以提高人员的安全,减少危险事件发生的可能性。当不再局限于太空服的质量和体积限制时,便携式生命支持设计师可以考虑更适合于扩展探索的技术方案,如冷却散热器、扩展电力的太阳能电池板或可再生的二氧化碳洗涤系统。
3.高空环境和大气金星传感器(LEAVES)
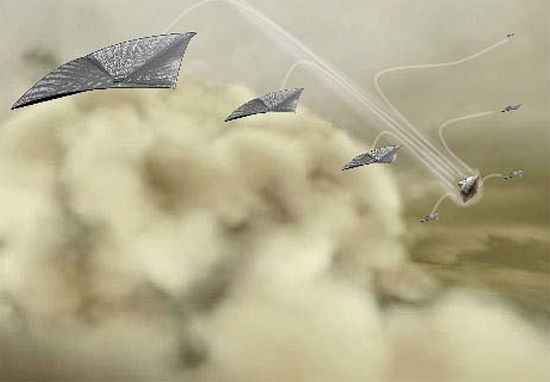
LEAVES概念是一种超轻质的、被动的、廉价的大气传感器,它的设计是为了抵御恶劣的金星大气,但它也提供了一个通用平台,可以对任何有明显大气的行星进行现场取样。相比传统方法,LEAVES需要非常少的基础设施。
任务科学目标是通过在广泛的地理区域部署许多相同的LEAVES单位来实现,通过可重复使用的生产线和可利用的部件实现成本节约的目的,并通过并行操作增加业务弹性。此外,这种结构非常适合作为辅助负载,因为它需要很少的地面站点控制资源,对主要有效负载的风险很小,并且只在它们缓慢下降通过大气层的过程中反馈数据。
4.探索小行星流星撞击检测

小行星含有丰富的资源,包括水和可以提取的贵金属。在接下来的几十年里,我们很可能有技术能力来检索小行星,并将它们带到靠近地球的处理设施上,或者将处理设施发送到小行星上以现场提取资源。然而,完成这两项任务都需要大量的投资。探索小行星流星撞击检测(MIDEA)的概念是,利用自然太空环境提供流星撞击,从而导致小行星表面的物质受到侵蚀。
由流星撞击所产生的物质包括固体和熔融喷出物,但其中有些物质被蒸发和电离,形成等离子体,扩展到小行星周围的环境中。这种等离子体向外扩展,并提供有关小行星表面组成的信息。MIDEA可以使用10到50公斤的航天器母船,携带10个或更少的自由飞行传感器,每个大约重100克,对直径100到1000米的近地小行星(NEA)进行检测。在如此低的质量范围内,许多类似任务可以针对不同的小行星平行发射,在专门的就地资源利用(ISRU)任务之前对潜在目标进行广泛的调查。
5.无碰撞细小轨道碎片测绘

我们建议评估细小(微米到亚厘米级)轨道碎片的可行性,使用装有传感器的立方体卫星来检测碎片的等离子体特征。这些细小碎片目前是无法探测到的,但它们对太空船构成了危险。最近发现的等离子孤子是由等离子体中快速移动的带电碎片引起的,它可以通过立方体卫星上的简单传感器来测绘出来。这种技术将使我们与细小轨道碎片的相互作用发生革命性变化,减小其对轨道航天器的威胁,并对缓解措施进行定量评估。
此外,该技术可能适用于其他行星目标附近的尘埃探测工作。初步计算表明,在不到1年的时间内,在400千米到1600千米高空轨道上的细小碎片可以使用100个立方体卫星测绘完毕。我们建议通过模拟不同速度和电荷的样品碎片物体所产生的等离子孤子,以及通过空间变化的等离子体环境远距离传播孤子,来评估这一概念的可行性。此外,我们还将开发用于探测等离子体孤子来绘制细小碎片的立方体卫星的初步设计。
6.火星蜜蜂,用于增强火星探测
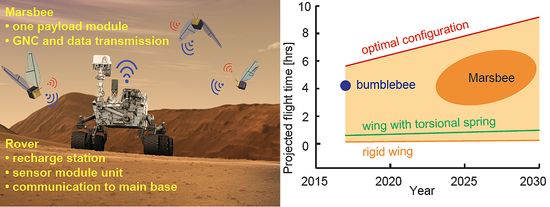
这项工作的目的是通过调查在火星环境中部署扑翼探测器的可行性,来增强火星探索和科学任务。这个火星探测器由移动基地和火星蜜蜂(Marsbee)群组成。这些蜜蜂是一种扇动翅膀的机器人,与蝉的大小差不多。火星蜜蜂中集成了传感器和无线通信设备,移动基地可以作为充电站和主要通信中心。蜂群可以显著增强火星探测任务,并有以下好处:1)促进可重构传感器网络;2)建立弹性系统;3)可利用单一蜜蜂或蜂群采集样本或数据。
关键的技术革新包括使用昆虫式的柔性翼来增强空气动力和低功率设计。通过适当借用昆虫生物飞行系统与火星动态环境,可以实现高升力系数。我们初步的数值结果表明,带有蝉翅的火星蜜蜂可以在火星大气中产生足够的升力。此外,利用柔性翼结构和创新的能量收集机制,将大大减少火星蜜蜂所需要的能量。由于火星密度极低,能量由惯性功率控制。在翼根上安装一个扭转弹簧,以暂时储存能量,并减少共振时的整体惯性力。虽然旋转翼的概念在设计和控制上都更加成熟,但这两项创新特别适合于生物激发的扑翼飞行器。
从系统工程的角度来看,火星蜜蜂比传统的航空系统有更多好处。较小的体积提供了更多的灵活性。另外,即使单个系统失败也不会影响整体效果。由于其体积相对较小,需要对系统进行测试,因此可以在各种可访问的测试设备中进行验证。这项技术结合了美国和日本的专业知识和人才,在一个多学科项目中解决了在火星大气中扑翼飞行的基本问题。阿拉巴马大学将对火星大气状况进行数值模拟、分析和优化。而日本团队将开发和测试一个微型扑动机器人,它是为火星上的低密度大气设计和建造的。
7.星际任务无衍射发射推进PROCSIMA

这是一种全新的、创新的光束推进结构,它可以使前往比邻星(Proxima Centauri)的星际任务成为现实。这一结构大大增加了航天器加速的距离(与激光推进相比),同时将发射机的光束尺寸减小到10米以下。这些优势转化为“方向和速度的变化”(delta-V)和有效载荷质量,比激光推进强大得多。这个推进架构主要是面向星际飞行任务,也可能使前往奥尔特云天体的速度更快。这个推进概念的关键创新是将中性粒子束和激光束结合在一起,这种方式既不会让光束扩散也不会随着传播距离而发散。
通过调整激光和粒子束的相互交互,可以消除衍射和热扩散,这样(1)粒子束产生的折射率变化生成波导效应(从而消除激光衍射)和(2)粒子束被困在激光束中心附近区域的高强度电场中。通过同时利用这些现象,我们可以产生一种具有恒定空间剖面的组合光束,也称为孤子。因此,这个体系结构被命名为PROCSIMA:光子粒子光学耦合孤子星际任务加速器。与绕射激光束相比,PROCSIMA体系结构增加了探测加速距离,使其在42年的任务中有效载荷能力达到1公斤。PROCSIMA架构利用了近年来高能激光系统和高能中性粒子束的技术进步。
8.麻雀(SPARROW):蒸汽驱动的海洋世界自动检索机器人

这是对推进跳跃机器人在冰冷、崎岖的海洋世界中实现高科学价值目标能力进行的新研究。跳跃模式的使用可以进行长距离的快速穿越,使单个任务能够在特定时间范围内到达多个地质单元,从而在恶劣的辐射环境中使系统得以生存下来。此外,使用推进跳跃技术可以消除地形的限制。这个概念的具体目标将通过世界领先的机器人、推进、样本采集工程师,以及来自喷气推进实验室、普渡大学和Honeybee Robotics的行星科学家通过跨学科合作来完成。
9.芭蕾舞(BALLET):用于极端地形的气球运动
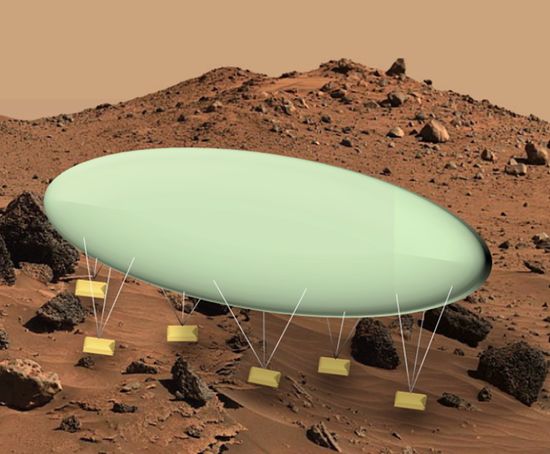
这个概念实际上是个气球平台,每个装有6个悬挂模块,每个模块包含一个有效载荷,也可作为移动的脚。每只脚被3根缆绳悬挂在气球上,以控制脚在地面上的位置。只有一个有效载荷被举起来移动到地面上的新位置,而其余的脚则保持气球固定在地面上。气球浮力只需要每次提升1英尺,脚按顺序在地表移动。这个平台高度稳定,因为它的重心几乎都在地面上。气球上的摄像头图像可被用来绘图,并用来定位脚的位置和导航。
10.能够生长的外星表面结构
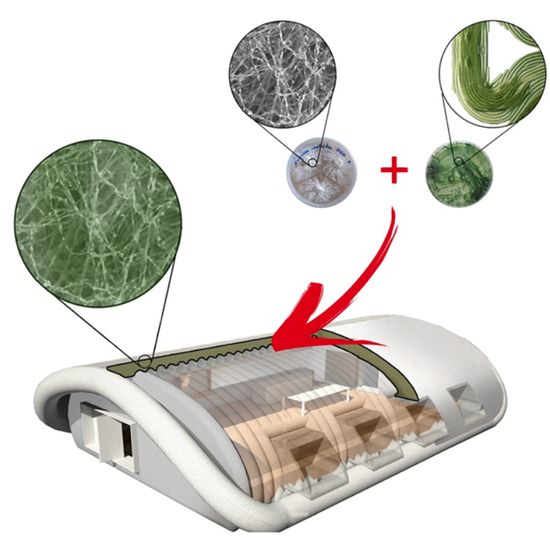
美国宇航局设想一种由轻型纤维材料制成的、具有优良机械性能的自我定位栖息地。这种材料可在干燥、潮湿、寒冷的地方使用,或者作为一种自产复合材料,能够增强辐射防护和蒸汽密封。它可以自我复制,因此栖息地可以不断扩展,并自我修复。这种材料的某种形式可以用于在外星建造栖息地、额外建筑物、探测器外壳和家具。纤维材料是真菌菌丝,已经商业化生产的菌丝材料是已知很好的绝缘体,阻燃剂,不会产生有毒气体。这些材料的压缩强度优于木材,弯曲度优于钢筋混凝土,绝缘性能超棒。
由于菌丝通常会分泌酶,所以有可能通过生物工程技术使其分泌其他物质,如生物塑料或乳胶,以形成生物合成物。菌丝的弹性和韧性要比岩屑更强。它可以作为一种独立材料使用,或与凝集或烧结的岩屑结合,这种霉菌结构的建筑包膜可以显著降低建筑所需的能量,因为在存在食物储备和水的情况下,它会自行生长。在人类到达后,还可以通过生产任务产生的有机废物来增加额外的结构。富含黑色素的真菌具有吸收放射性物质的能力,这表明真菌菌丝可以提供辐射保护。
在风化层中发现的铅,或其他阻挡辐射的物质,例如水,可以在菌丝中积累,从而提供额外的辐射保护。在受到保护的时候,这些真菌可以有很长的寿命,但在生命周期的末期,这种材料可以成为农业肥料。菌丝和原料在加热情况下,可以加速生长。当原料被消耗,热量被提取或菌丝被热杀死时,菌丝生长将停止。如果需要对结构进行增补或修复,可以添加水、热量和原料,以恢复休眠真菌的生长。如果能够成功地开发出一种能够自行生长的生物复合材料,NASA将会有一种全新的、更便宜、更轻巧的材料,用于为长期的月球任务、火星任务。
————————
NIAC项目主管詹森·德勒斯(Jason Derleth)说:“2018年第一阶段的竞争特别激烈,超过230个提案,但只有25个赢家。我迫不及待地想看看新的NIAC研究员能为NASA做些什么!”
第二阶段的研究让获奖人员有时间完善他们的设计,并探索实施新技术的各个方面。今年的第二阶段投资组合涉及到一系列前沿概念,包括用于星际任务的突破性推进结构、大型空间望远镜、海卫一的新型探测工具以及马赫效应推力器。NIAC二期项目的奖金可达50万美元,为期两年,并允许申请人进一步开发第一阶段概念,成功演示初始可行性和效益。
美国宇航局通过评估创新和技术可行性的同行评审过程来选择这些项目。所有的项目仍处于开发的早期阶段,大多数项目需要10年或更长时间的概念成熟和技术开发阶段,然后才能用于NASA任务。NIAC与来自全美各地有远见的科学家、工程师和公民发明家合作,帮助维护美国在太空领域的领导地位。NIAC由美国宇航局下属太空技术任务局资助,该部门负责开发该机构所需的各种开拓性新技术和能力,以帮助实现其当前和未来任务。
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”


