
- 1深入浅出分布式系统中的缓存架构_分布式缓存
- 2Stable Diffusion 秋叶整合包v4.7 :解压即用,快速入门AI绘画_stable diffusion秋叶整合包
- 3java 线程集合_java多线程使用集合那点事
- 4深浅谈关于 Vue3 的 Proxy 和 Reflect 实现响应式原理_reflect vue
- 5高级Java开发工程师手把手教你用AI人工智能帮你写JAVA代码实际案例一全网唯一_java开发ai
- 6二叉树_指向左子树的指针
- 7android蓝牙开发基础知识讲解,常见bluetooth蓝牙开发步骤
- 8azure linux 挂载磁盘,如何给Azure云服务器扩展云磁盘
- 9归并排序(递归+非递归)
- 10飞凌技术帖 | RK3568开发板的OTA升级教程
ContextCapture(Smart3D)总结(1)——构建空三模型(S3C,OSGB,DOM)_contextcapture进行空三
赞
踩
1、打开软件
红色图标、黑色图标(如果同时跑两个,那么要在桌面重新打开黑色图标新建工程,不能直接在已经打开的工程上新建)
如果提示缺少.DLL文件,那么就是被杀毒软件清除了,需要拷贝一个到、、、、、)
2、新建工程
路径必须全英文(一般是照片的上层文件夹),名字也是“地名日期”的拼音
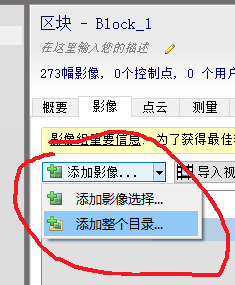
3、添加影像
在“影像”中添加影像,如果某一架次都在同一个文件夹中,那么添加整个文件夹即可:
4、修改并导入pos数据:
4.1大疆无人机的pos数据是附在照片上的,不用修改pos数据。如果使用五镜头则需要单独改好pos数据。
4.2有的需要区块文件直接导入。
4.3修改pos数据:
a、pos数据文件名为:“dandian.txt”;
b、新建空白excel,打开pos文件:A为编号,B为日期,C不知道,DEF分别为XYZ坐标,GH为经纬度,IJK为飞机的姿态坐标。

c、仅保留A和DEF,即编号、XYZ坐标共四列,另存为“dandian-pos.txt”,然后在txt中用替换将分隔符都改成1个空格:
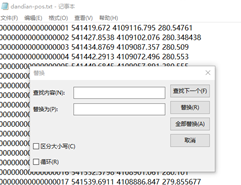
d、导入位置数据,选择分隔符为“太空”,然后给字段赋属性,然后导入即可完成。



5、3D预览
在“3D视图”中预览一下,是否平的。

6、预跑空三
在“概要”里提交一次“空中三角测量”(相当预跑一次),切向畸变选择“平差调整”。尽量不要多个架次一起跑,容易出现跑偏。




如果出现影像无法匹配,那么可能就需要将其删除,但可以等着刺完点再跑空三之后再说。


7、3D视图检查
完成后在“3D试图”看一下是否“平、在一条直线、有无弧度”

8、查看质量报告




9、添加像控点
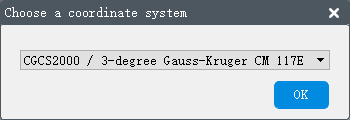
添加像控点文件(需要转换成为正常高),注意:1)检查相控点是否加上了异常高;2)选择好坐标系及中央经线。

10、查看像控点
在3D视图中查看哪些像控点是这个架次的,也可以查看这个像控点周围的照片编号(一般不看,直接刺点):


11、刺点
在列表中将其他的像控点删掉,然后刺点,【可以先每个点刺3张,然后提交一次空三,然后再全刺】可以通过Pttential Matches查看预测点:


12、选检查点
如果像控点较多,那么可以设置整幅图靠中心、周围有其他控制点的那个像控点为“检查点”,【注意,尽量不要选择周围没有其他像控点的点作为检查点,否则,可能会因为该点控制没起到作用而使得跑不过去】,双击该像控点即可,打开下面界面:

13、再跑空三
在概要中再次提交“空中三角测量”,可以看到已经选择控制点进行平差,然后选择切向畸变为平差调整。。。
如果还有影像无法跑过,那么就需要检查影像质量是否太暗或者太亮,如果不多且确实无法改变,可以将其删点:




14、检查空三
如果还有影像无法跑过,那么就需要检查影像质量是否太暗或者太亮,如果不多且确实无法改变,可以将其删掉,如果只有一张,那么可以不删。
再次检查空三效果报告,误差要小于1个像素:


15、多个架次跑不过去,可以将小的那一个架次裁掉。

16、新建重建项目
在概要中,“新建重建项目”:

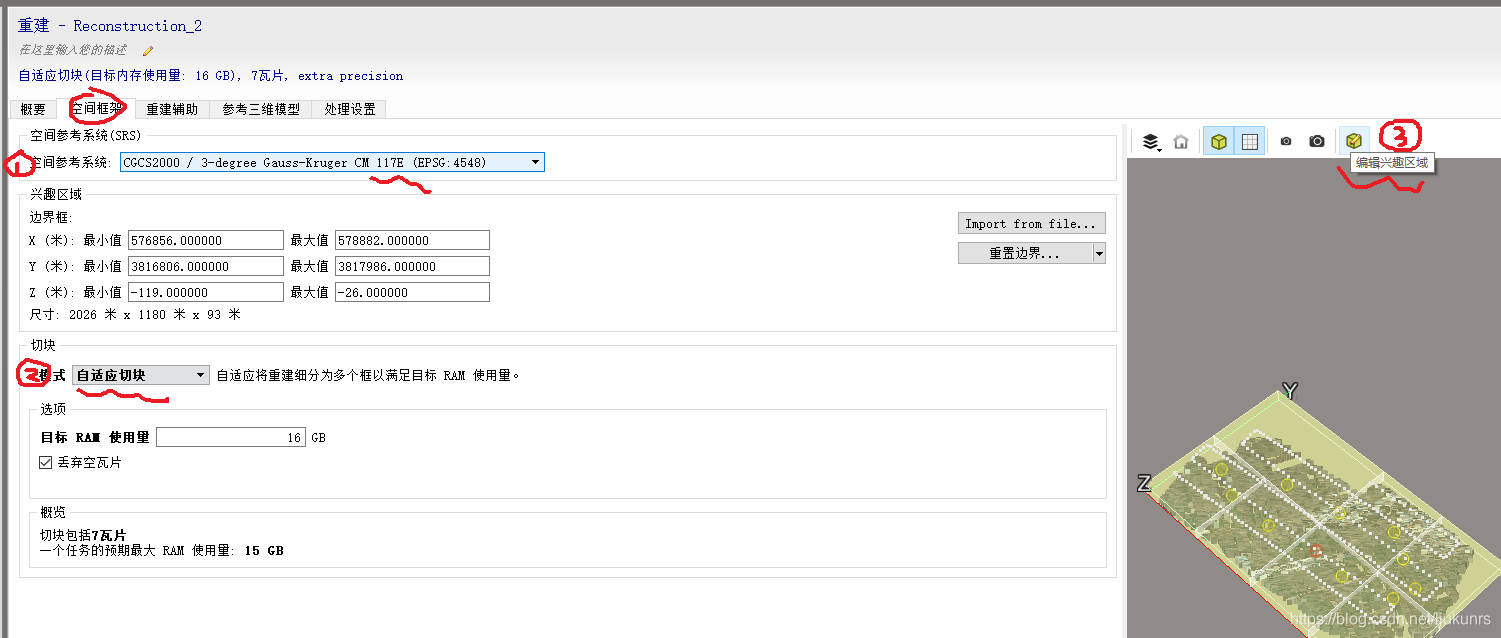
17、设置空间框架
在空间框架中(1)选择坐标系、(2)模式选择“自适应切块”、(3)可以编辑掉不要的部分:
18、提交S3C
提交新的生产项目,需要改名、选格式、注意检查纹理压缩,S3C的JPEG为75%【中文版的选择70%即可,到输出时自动变成75%】,如果OSGB则为100%:







19、提交OSGB

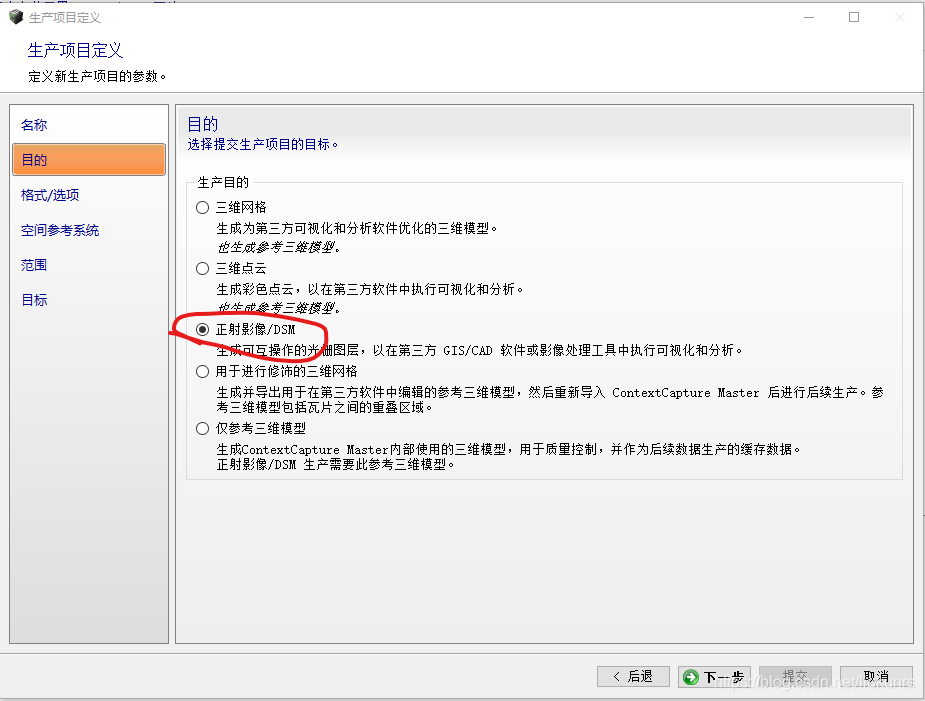
20、提交DOM
必须在提交S3C和OSGB之后再提交DOM,注意修改分辨率。

21、检查项目是否正确


