
热门标签
热门文章
- 1Django进阶:DRF(Django REST framework)_django drf
- 2ETH等提出思维图(GoT)超越思维链(CoT): 用LLMs解决复杂问题!
- 3计算机学院毕业生祝福,暖心的毕业祝愿赠言
- 4「屏蔽更新」 Mac如何屏蔽系统更新_mac屏蔽更新
- 5flink学习之sql-client之踩坑记录_org.apache.flink.table.catalog.exceptions.cataloge
- 6设计模式-解释器模式(Interpreter)_设计模式 解释器模式
- 7Qt lnk1158 无法运行rc.exe 解决_qtlnk1158: 无法运行“rc.exe”
- 8Java爬虫(七)-- httpClient进阶: https 和 证书认证(讲故事篇)
- 9大数据Hadoop之——EFAK和Confluent KSQL简单使用(kafka listeners 和 advertised.listeners)
- 10边缘计算采集网关解决方案:为企业提供高效、灵活的数据处理方案-天拓四方
当前位置: article > 正文
【C++】ROS:树莓派ROS智能小车调试使用记录_用来搭建智能车,可以选用哪一款树莓派
作者:我家小花儿 | 2024-06-12 17:25:51
赞
踩
用来搭建智能车,可以选用哪一款树莓派
最近手里有一辆 clb 的树莓派ROS履带小车,不过放了好久,功能有点问题,最近打算把小车重新拆装、清洗,软件也重新刷写,然后顺便记录以下功能调试的过程。
一、简介
记得以前大家玩智能小车基本是以STM32为主控,搭配摄像头、超声波雷达等传感器,但随着自动驾驶开始热起来后,大家都开始用树莓派、ROS系统、激光雷达这些部件来组装一辆智能小车了。
或许是教育方面的引导,一辆智能小车就类似于自动驾驶的原型系统,STM32下位机是汽车ECU的缩影,而树莓派/Jetson是自动驾驶车辆计算平台的缩影,学习激光雷达感知、摄像头感知,路径规划,下位机通讯与执行等功能。
二、机械部分
拆散后的履带小车车架如图所示:

背面(包含电池、电机):
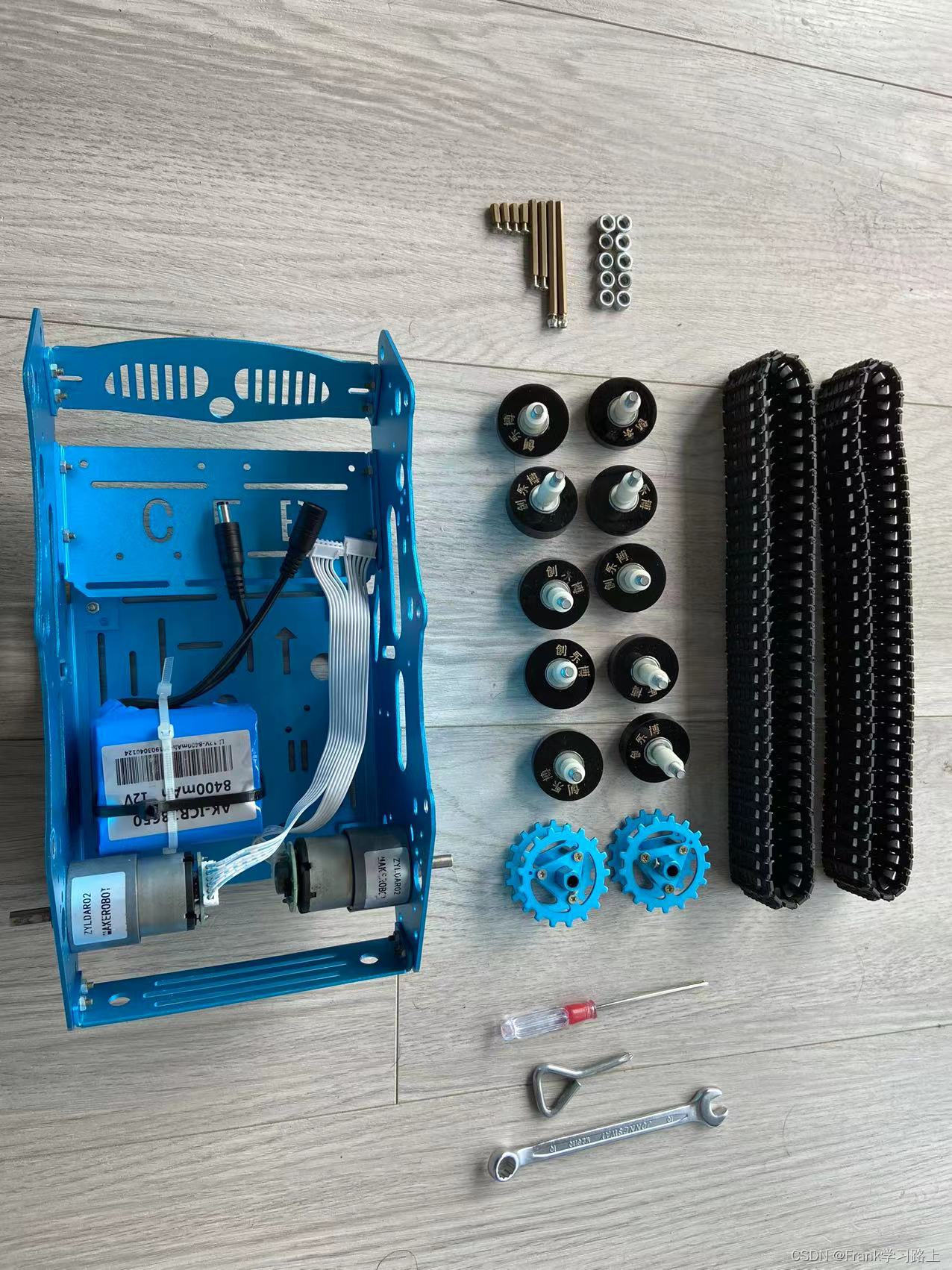
车架整体图如下(由6部分零件组成):
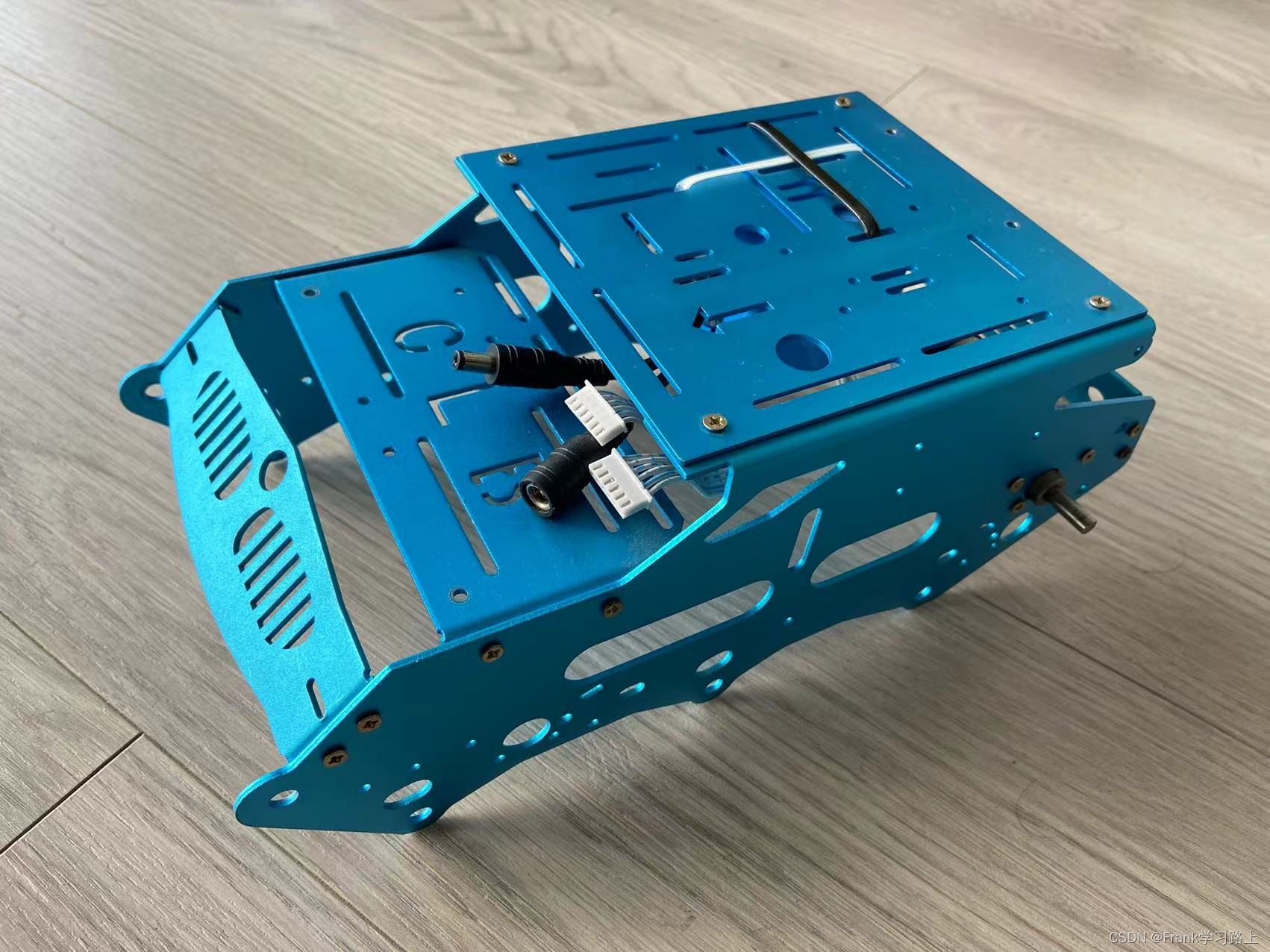
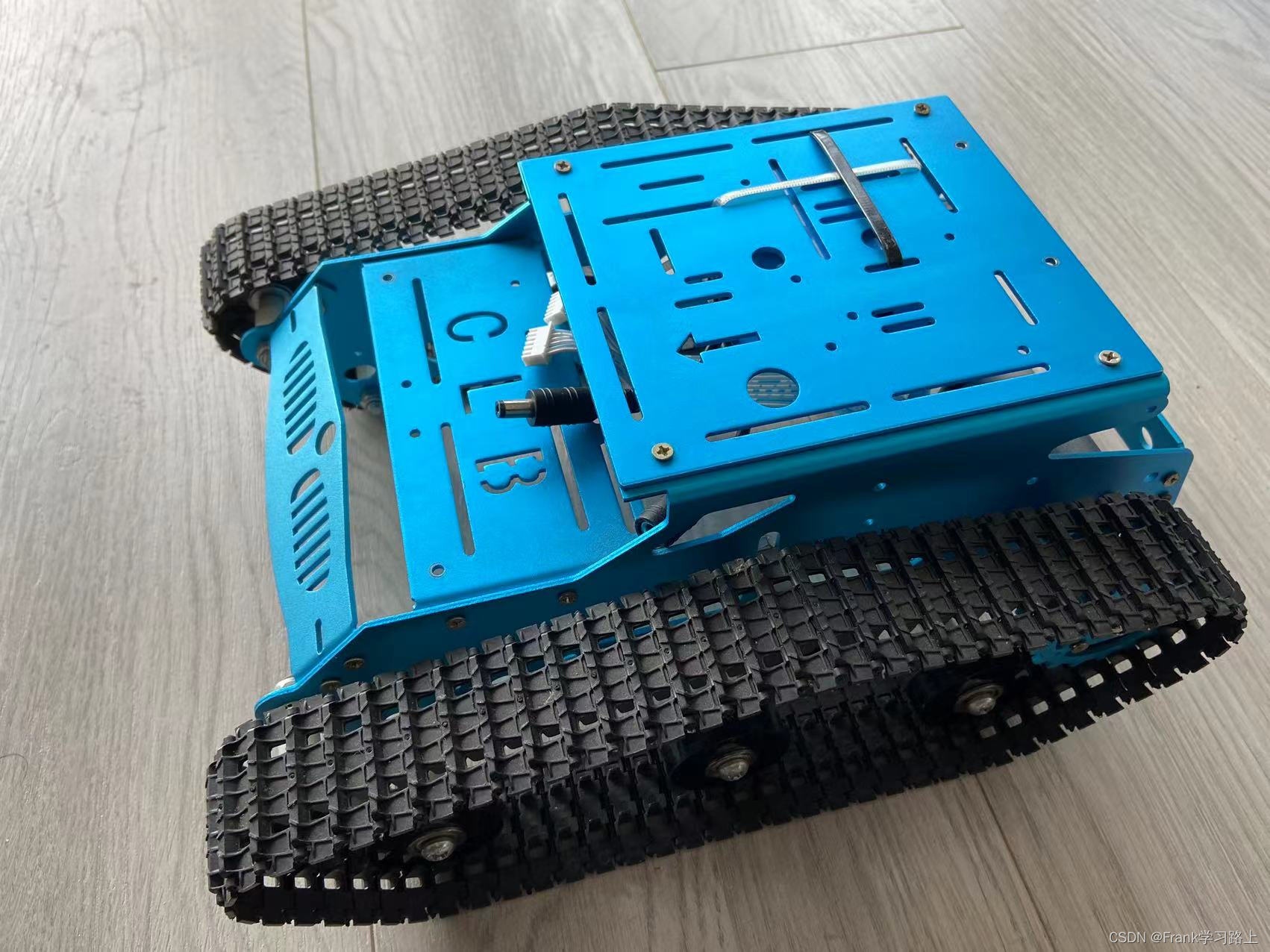
组装好的车架如下:
三、电气部分
安装STM32驱动板,接上电源和电机。
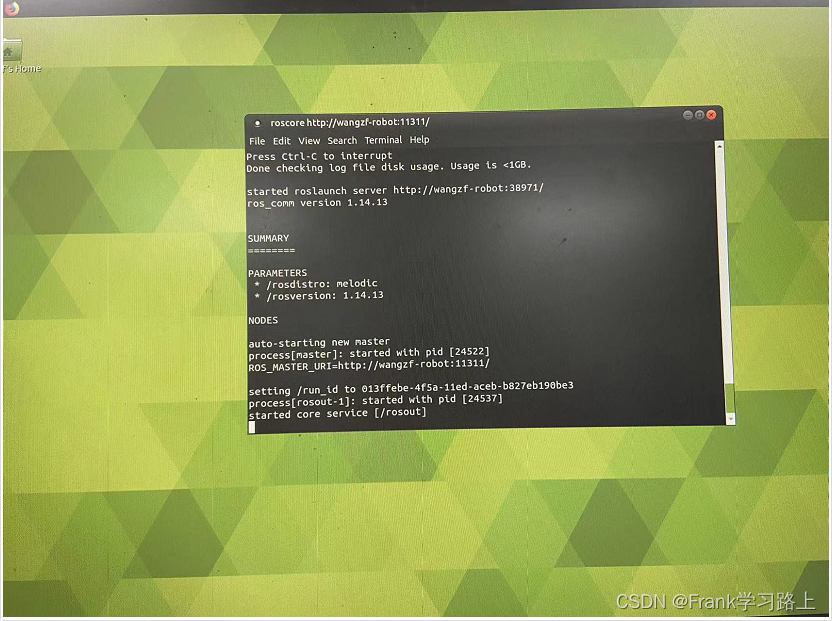
四、软件部分
树莓派安装Ubuntu Mate系统,然后安装ROS:
安装ssh,使得可以远程调试:
sudo apt-get install openssh-server
sudo systemctl start ssh
sudo systemctl enable ssh
- 1
- 2
- 3
五、功能调试
- 控制底盘运动
- 激光雷达测试及SLAM
- 相机测试及物体检测
- 路径规划与运动控制
这个博主有详细记录功能调试过程:创乐博机器人调试
以上。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/708921
推荐阅读
相关标签

