
- 1【云原生】3.5 RuoYi-Cloud部署实战(下)
- 2论文笔记——Influence Maximization on Undirected Graphs: Toward closing the (1 − 1/e) Gap_im问题最大度启发式算法
- 3LeetCode 674. 最长连续递增序列_leetcode 674.最长连续递增序列
- 4Sublime Text内运行javascript(ES6)及代码检查_sublime text能不能运行js代码?
- 5Linux Ubuntu系统版本通过Crontab设置定时任务的执行_ubuntu系统中执行crontab -e就能编辑添加定时任务
- 6LeetCode-347. 前K个高频元素 Python3版本_python前k个高频元素 给定一个非空的整数数组,返回其中出现频率前k高的元素。例如
- 7Nodejs入门详解 --- 使用(Express + MySQL + Nodejs)编写接口,附带接口实战项目_node+mysql
- 8wwwxxx域名选择(www.xxx.com或者.cn)
- 9django的auth模块_django admin 关闭auth
- 10遥感图像识别(标注)软件实现
【STM32+HAL库+CubeMX】UART轮询收发、中断收发、DMA收发方法及空闲中断详解
赞
踩
(转载)原文链接:https://blog.csdn.net/qq_39344192/article/details/131470735
1. 什么是UART?
UART是一种异步串行通信接口,常用于通过串口与外部设备进行通信。它通过发送和接收数据帧来实现数据传输,使用起来相对简单。UART通常包含发送器(Transmitter)和接收器(Receiver),通过两根信号线(传输线)进行双向通信。
2. UART协议内容简介
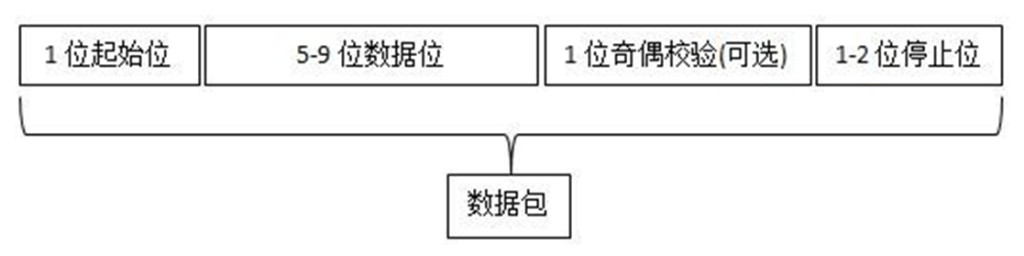
UART协议将一长串数据切成很多固定长度的小段,分别发送。每小段数据前后会加上一些附加数据以保证通信的实时性和准确性,最后形成的每个小段叫做一个数据包——即1帧数据。
- 起始位:发出1位低电平信号,表示开始传输字符。
- 数据位:真正发送的数据,一般为8位(1个字节),常采用ASCII编码,从最低位开始发送。
- 校验位:用于检验接收到的数据是否正确,分为奇校验和偶校验。
- 停止位:一组数据的结束传输的标志。可以是1位、1.5位、2位的高电平。
- 空闲位:空闲时数据线为高电平状态,代表无数据传输。
- 波特率:衡量传输速率的指标。UART通信中波特率等于比特率。
UART通信的两个设备间,以上因素必须完全一致才能实现数据通信。
3. UART轮询收发
UART轮询收发时,CPU会不断检测串口的状态位来判断数据收发的情况。
3.1 UART轮询收发的优缺点
UART轮询收发是一种简单直接的UART通信方式,它具有以下优点和缺点:
优点
- 简单易实现:相比于中断或DMA方式进行数据收发,UART轮询收发的实现相对简单,不需要额外配置中断或DMA控制器,减少了开发的复杂性。
- 低延迟:由于没有中断处理程序的介入和数据传输的等待时间,UART轮询收发可以实现较低的延迟,对实时性要求较高的应用场景较为适用。占用CPU资源,效能低:UART轮询收发需要通过不断的轮询来检查发送和接收缓冲区的状态,这会占用CPU的资源,导致CPU无法充分利用来执行其他任务。
缺点
- 占用CPU资源,效能低:UART轮询收发需要通过不断的轮询来检查发送和接收缓冲区的状态,这会占用CPU的资源,导致CPU无法充分利用来执行其他任务。
UART轮询收发适用于简单的、对实时性要求不高的低速通信场景。但在对实时性、效率和灵活性要求较高的应用中,中断或DMA方式可能更加适合。在选择UART通信方式时,需要根据具体应用需求进行权衡和选择。
3.2 UART轮询收发相关的函数
初始化UART参数:首先,需要对UART进行初始化,包括波特率(Baud rate)、数据位数、校验位、停止位等参数的设置。这些参数决定了数据的传输格式。
| 初始化函数 | HAL_UART_Init(UART_HandleTypeDef *huart); |
|---|---|
| 功能 | 根据串口句柄指定的参数进行串口初始化。 |
| 入口参数 | huart:串口句柄的地址指针。 |
| 返回值 | HAL状态值。 |
| 说明 | 使用CubeMX配置工程时,初始化代码会自动生成,我们不需要再对串口进行初始化。 |
发送数据:要发送数据,首先将待发送的数据写入UART发送缓冲区,然后调用轮询发送函数。在轮询方式下,单片机会一直检查是否完成发送,直到超过设定时间或数据发送完成。
| 轮询发送函数 | HAL_UART_Transmit(UART_Handle TypeDef *huart, uint 8_t *pData, uint 16_t Size, uint 32_t Timeout); |
|---|---|
| 功能 | 在轮询方式下发送一定数量的数据。 |
| 入口参数 | huart:串口句柄的地址。pData:待发送数据的首地址。Size:发送的字节数。Timeout:超时等待时间, 以毫秒为单位。 |
| 返回值 | HAL状态值。 |
接收数据:要接收数据,需要从UART接收缓冲区读取数据。同样,在轮询方式下,单片机会一直检查是否完成接收,直到超过设定时间或接收到所有数据。
| 轮询接收函数 | HAL_UART_Receive(UART_Handle TypeDef *huart, uint 8_t *pData, uint 16_t Size, uint 32_t Timeout); |
|---|---|
| 功能 | 在轮询方式下接收一定数量的数据。 |
| 入口参数 | huart:串口句柄的地址。pData:存放数据的首地址。Size:接收数据的字节数。Timeout:超时等待时间, 以毫秒为单位。 |
| 返回值 | HAL状态值。 |
3.3 【实践】使用蓝牙模块发送数据
使用UART协议,向手机循环发送“Hello World”语句。
3.3.1 配置UART
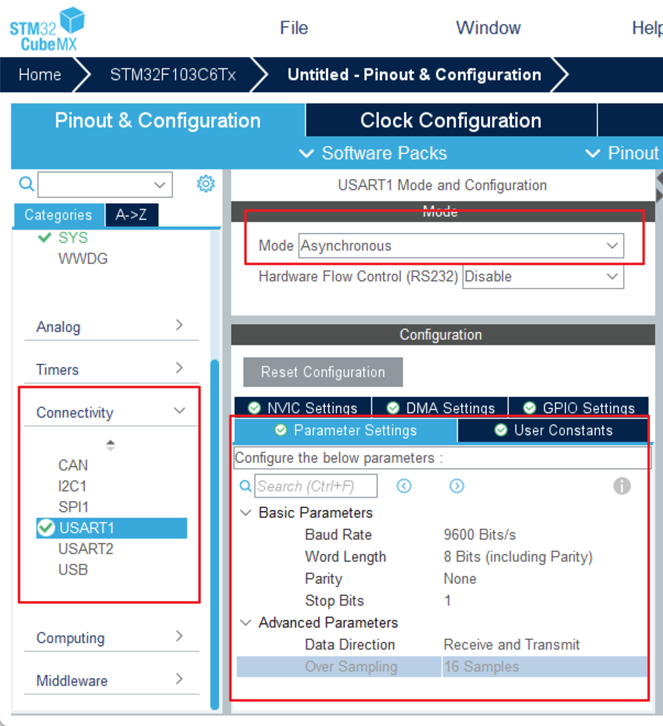
- 左侧connectivity中点击USART1。
- 右侧Mode,选择为Asynchronous(异步通信)
- 配置参数:
- Baud Rate(波特率):9600Bits/s
- Word Length(字长):8 Bits
- Parity(奇偶校验位):无校验位
- Stop Bits(停止位):1位
USART包括UART与USRT。我们使用USART的UART模式,即Asynchronous。
3.3.2 连接单片机与蓝牙模块
| 单片机 | 蓝牙模块 |
|---|---|
| RX | TX |
| TX | RX |
| 5V | VCC |
| GND | GND |
3.3.3 代码实现
在main.c中添加如下语句:
- /* 添加至引用区 */
- #include "string.h" // strlen函数依赖该头文件
- /* 添加至变量定义区*/
- char txBuffer[] = "Hello World"; // 需要发送的数据
- /* 写在main()的while(1)循环内 */
- while(1)
- {
- HAL_UART_Transmit(&huart1, (uint8_t *)txBuffer, strlen(txBuffer), 1000);
- HAL_Delay(1000);
- }
4. UART中断收发
4.1 UART中断收发的优缺点
优点
- 提高系统效率:相比于UART轮询收发方式,UART中断收发可以提高系统的效率。当每完成发送或接收一帧数据时,中断会通知CPU进行相应的处理,而不需要CPU不断地轮询发送或接收缓冲区,释放了CPU资源,使CPU可以同时执行其他任务;
- 系统响应更快:通过使用中断机制,UART中断收发可以提供更快的系统响应时间。一旦有数据可发送或可接收时,中断立即触发,通知CPU进行相应操作,减少了数据传输的延迟。
- 灵活性:UART中断收发具有较高的灵活性。中断处理程序可以对数据进行灵活的处理和控制,可以根据实际需求进行相应的操作,如解析数据、执行特定任务等。复杂性增加:相对于UART轮询收发方式,UART中断收发的实现相对复杂一些。需要正确配置中断触发条件和中断优先级,同时编写中断处理程序进行数据的发送和接收操作。
缺点
- 中断开销:中断处理程序的执行会占用一定的CPU时间和系统资源。频繁的中断触发可能会增加系统的开销。
- 实时性限制:尽管UART中断收发可以提高系统的响应时间,但它仍然受限于中断处理程序的执行时间和优先级。在高实时性要求的应用中,中断处理程序的执行时间必须保持足够短,以确保数据的及时处理和传输。
- 占用CPU资源:在传输数据量较大时,如果采用中断方式,每收发一帧的数据,CPU都会被打断,造成CPU无法处理其他事务。因此在批量数据传输,通信波特率较高时,建议采用DMA方式。
UART中断收发相较于UART轮询收发,提高了系统的效率,但是遇到大量、高速的数据传输时仍然会对CPU的性能产生影响。
4.2 UART中断收发时触发中断的流程
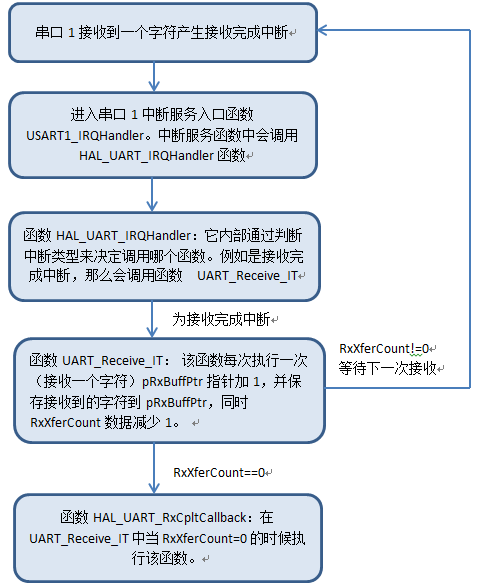
使能中断后,每收发1帧数据后,UART会触发UART全局中断。此时程序会进入到中断处理函数 USART1_IRQHandler()。在这个函数中,又调用了HAL库的中断处理函数HAL_UART_IRQHandler(&huart1),该函数会通过判断中断类型来决定调用哪个函数。
如果收发完成 -> 进入发送/接收回调函数;
如果产生错误 -> 进入错误回调函数;
如果未收发完 -> 继续发送/接收。
简而言之,每完成一帧数据的收发,都会调用一次中断处理函数,但只有当收发完成时才会调用发送/接收回调函数。在实际操作中,我们一般不需要对中断处理函数HAL_UART_IRQHandler()进行修改。我们将收发完成时的操作逻辑写在回调函数中即可。
4.3 UART中断收发相关的函数
4.3.1 发送相关函数
| 中断发送函数 | HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size); |
|---|---|
| 功能 | 在中断方式下发送一定数量的数据。 |
| 入口参数 | huart:串口句柄的地址。pData:发送数据的首地址。Size:发送数据的字节数。 |
| 返回值 | HAL状态值。 |
| 发送回调函数 | HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); |
|---|---|
| 功能 | 本函数会在中断发送完成时被调用。 |
| 入口参数 | huart:串口句柄的地址。 |
| 返回值 | 无 |
4.3.2 接收相关函数
| 中断接收函数 | HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size); |
|---|---|
| 功能 | 在中断方式下接收一定数量的数据。 |
| 入口参数 | huart:串口句柄的地址。pData:存放数据的首地址。Size:接收数据的字节数。 |
| 返回值 | HAL状态值。 |
| 接收回调函数 | HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); |
|---|---|
| 功能 | 本函数会在中断接收完成时被调用。 |
| 入口参数 | huart:串口句柄的地址。 |
| 返回值 | 无 |
4.4 回调函数的使用方式
在stm32f1xx_hal_uart.c文件中,我们可以找到回调函数的声明方式(下以接收回调函数为例)。
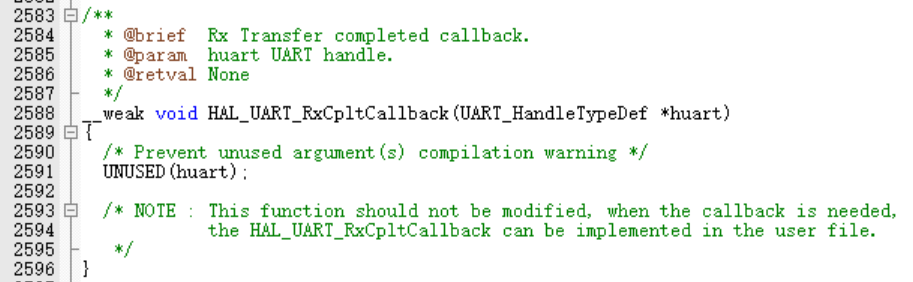
关注到函数声明前带有__weak修饰,我们一般将这种函数称之为“弱函数”。含有__weak标识的函数,我们可以自行声明一个同名函数,最终编译器在编译的时候会选择我们自己定义的函数。如果我们没有声明该函数,则会调用有__weak修饰的函数。因此,我们只需要在合适的位置自己声明一个回调函数即可,不必在该文件中进行修改。
4.5 【实践】使用中断方式收发数据
通过蓝牙向单片机发送三个英文字母,单片机将大小写翻转后发回。
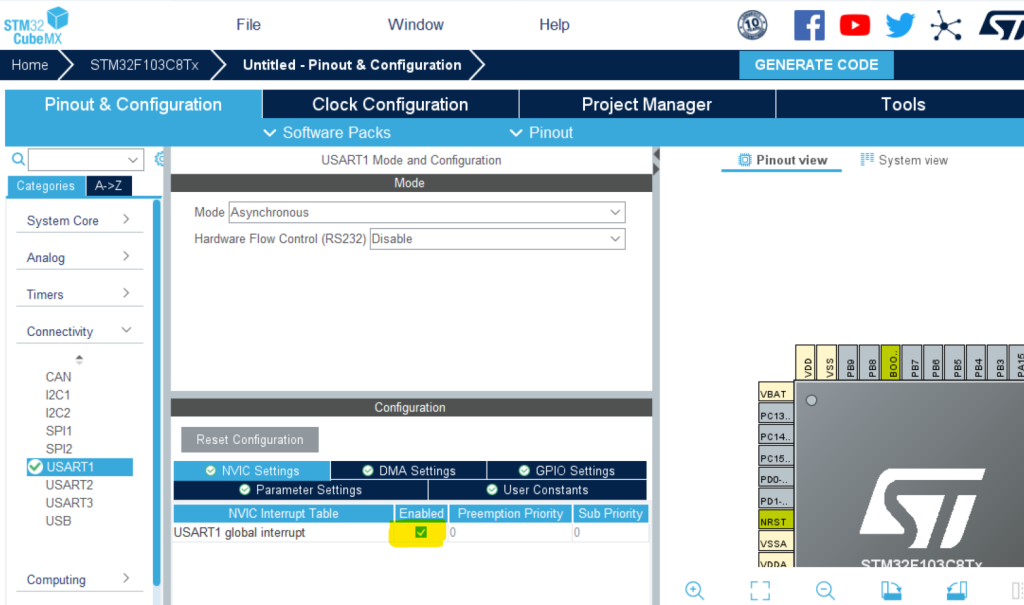
4.5.1 配置UART
在上一节配置的基础上,我们打开UART1的全局中断。
4.5.2 代码实现
我们在main.c中添加如下代码
- /* 添加至宏定义区 */
- #define rxDataLen 3 //接收三个字节的数据
- /* 添加至变量定义区*/
- char rxBuffer[rxDataLen]; // 存储接收到的数据的数组
-
- int main()
- {
- /* 添加至while(1)循环前*/
- HAL_UART_Receive_IT(&huart1, (uint8_t *)rxBuffer, rxDataLen); // 中断方式接收三个字节数据
-
- while(1) // 注意不要将中断接收写在while循环内
- {
- HAL_Delay(1);
- }
- }
在完成一次接收后,我们需要将接收到的字母大小写翻转并输出。我们需要在接收回调函数中实现这一功能,定义接收回调函数如下。
- // 接收回调函数(由于需要覆盖原先的弱函数,本函数名称不能更改)
- void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
- {
- if(huart == &huart1) // 如果是串口1
- {
- for(int i = 0; i < rxDataLen; i++)
- {
- if(rxBuffer[i] >= 'a' && rxBuffer[i] <= 'z')
- {
- rxBuffer[i] += 'A' - 'a';
- }
- else if(rxBuffer[i] >= 'A' && rxBuffer[i] <= 'Z')
- {
- rxBuffer[i] -= 'A' - 'a';
- }
- }
- HAL_UART_Transmit_IT(&huart1, (uint8_t *)rxBuffer, rxDataLen);
- }
-
- // 使用HAL_UART_Receive_IT()时,只会进入一次中断。因此需要在回调函数内再次调用该函数
- HAL_UART_Receive_IT(&huart1, (uint8_t *)rxBuffer, rxDataLen);
- }

5. UART使用DMA进行收发 & 空闲中断
5.1 啥是DMA?
DMA(Direct Memory Access,直接内存访问)是一种计算机系统中的数据传输技术,它允许外设直接访问寄存器,而无需通过CPU的干预。DMA技术可以提高数据传输的效率和系统性能,减轻CPU的负担。
简单点来说,DMA收发与轮询、中断都有所不同。在收发数据时,CPU只需告诉DMA数据的来源以及目的地址等信息即可,而无需参与中间的所有传输过程(例如中断收发时每收发一帧数据都会进入中断处理函数,而DMA只在接收完成等少数时刻触发中断,大大降低了CPU的压力)。
5.2 什么是空闲中断?
空闲中断(Idle Interrupt)是UART通信中的一种中断类型。当UART处于空闲状态(没有接收到数据)且持续时间超过一个帧的传输时间时,空闲中断会触发,调用上节提到的函数USART1_IRQHandler。空闲中断可以用于检测数据帧的结束或接收数据的完成。
5.3 相关函数
| 使能UART的特定中断(宏) | __HAL_UART_ENABLE_IT(__HANDLE__, __INTERRUPT__); |
|---|---|
| 参数 | __HANDLE__:指向UART句柄的指针;__INTERRUPT__:要使能的中断标志位。 |
| 说明 | 本节会使用到空闲中断,即UART_IT_IDLE |
| DMA发送函数 | HAL_UART_Transmit_DMA(UART_Handle TypeDef *huart, uint 8_t *pData, uint 16_t Size); |
|---|---|
| 入口参数 | huart:串口句柄的地址。pData:发送数据的首地址。Size:发送数据的字节数。 |
| DMA接收函数 | HAL_UART_Receive_DMA(UART_Handle TypeDef *huart, uint 8_t *pData, uint 16_t Size); |
|---|---|
| 入口参数 | huart:串口句柄的地址。pData:存放数据的首地址。Size:接收数据的字节数。 |
| 禁用DMA传输(宏) | __HAL_DMA_DISABLE(_HANDLE_); |
|---|---|
| 参数 | __HANDLE__:指向UART句柄的指针 |
| 使能DMA传输(宏) | __HAL_DMA_ENABLE(_HANDLE_); |
|---|---|
| 参数 | __HANDLE__:指向UART句柄的指针 |
| 设置DMA传输计数器值(宏) | __HAL_DMA_SET_COUNTER(__HANDLE__, __COUNTER__); |
|---|---|
| 参数 | __HANDLE__:指向UART句柄的指针__COUNTER__:要设置的计数器值。 |
| 获取DMA传输的计数器值(宏) | __HAL_DMA_GET_COUNTER(__HANDLE__); |
|---|---|
| 参数 | __HANDLE__:指向UART句柄的指针 |
| 宏定义 | #define __HAL_DMA_GET_COUNTER(__HANDLE__) ((__HANDLE__)->Instance->CNDTR) |
| 说明 | 这个宏需要我们自行定义。 我们可以利用这个宏定义来获取接收到的数据的长度。 接收到的数据长度 = 设置的长度 - 当前DMA计数器的值,即 rxLen = rxBufferLen - __HAL_DMA_GET_COUNTER(__HANDLE__); |
5.4 【实践】使用DMA & 空闲中断实现不定长数据的接收
结合DMA以及空闲中断,实现接收不定长度的一段数据,发送这一数据的长度。
5.4.1 配置UART
参考前两节,配置好UART以及全局中断。我们还需要开启UART的DMA接收。
5.4.2 代码实现
在本节中,我们将代码按用途划分为不同函数,逐一实现。先定义如下全局变量以及宏变量。
- #define rxBufferLen 40 // 接收数据的最大长度
- #define __HAL_DMA_SET_COUNTER(__HANDLE__, __COUNTER__) ((__HANDLE__)->Instance->CNDTR = (uint16_t)(__COUNTER__))
- char rxBuffer[rxBufferLen]; // 用于存放接收到的数据
程序运行之初,我们需要先对DMA接收进行初始化,该初始化函数应当在main()函数内调用一次。
- void UART_InitDMAReceive() // 初始化函数
- {
- __HAL_UART_CLEAR_IDLEFLAG(&huart1); // 清除空闲中断标志位
- __HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); // 开启UART的空闲中断
- HAL_UART_Receive_DMA(&huart1, (uint8_t*)rxBuffer, rxBufferLen ); // 启动DMA接收
- }
每当发生空闲中断或接收到的数据超过缓存区大小时,会产生一次中断。我们首先需要自行编写中断回调函数。
- void UART_DMAIdleCallback(UART_HandleTypeDef *huart)
- {
- if(huart == &huart1)
- {
- // 停止DMA接收
- __HAL_DMA_DISABLE(huart->hdmarx);
- // 计算接收到的数据长度
- uint8_t dataLen = rxBufferLen - __HAL_DMA_GET_COUNTER(huart->hdmarx) + '0';
- // 发送数据长度,使用轮询方法
- HAL_UART_Transmit(&huart1, &dataLen, 1, 10);
-
- // 重启DMA接收
- __HAL_DMA_SET_COUNTER(huart->hdmarx, rxBufferLen); // 重设DMA计数器
- __HAL_DMA_ENABLE(huart->hdmarx); // 使能DMA接收
- }
- }
我们在中断处理函数内添加如下内容(该函数位于文件stm32g4xx_it.c内)。
- void USART1_IRQHandler(void)
- {
- /* USER CODE BEGIN USART1_IRQn 0 */
-
- /* USER CODE END USART1_IRQn 0 */
- HAL_UART_IRQHandler(&huart1);
- /* USER CODE BEGIN USART1_IRQn 1 */
- if(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_IDLE) != RESET) // 判断中断是否为空闲中断
- {
- __HAL_UART_CLEAR_IDLEFLAG(&huart1); // 清除空闲中断标志位
- UART_DMAIdleCallback(&huart1); // 空闲回调函数
- }
- /* USER CODE END USART1_IRQn 1 */
- }

