
- 1mybatis缓存机制_清空 sqlsession 中的一级缓存
- 2基于Java的校园快递管理系统_一、运用meclipse软件,编写一个快递包裹的java程序,实现以下功能:(50分)(1)提
- 3面试必备—MySQL中数据查询语句_mysql查询语句
- 4Ubuntu(乌班图)常用命令
- 5大题历年题合集-信息资源管理_以下属于信息分析和组织的功能的包括
- 6华为云帕鲁服务器-云耀云容器版,到底强在哪?
- 7NAT介绍及命令配置_nat server
- 8华为OD机试(41-60)老题库解析&Java源码系列连载ing_华为od java机考题库
- 9原来访问网页弹出cookie是这样的_第一次打开网站弹出的cookied
- 10mybatis-plus 中and()和or()连用_mybatisplus中 and or嵌套使用
Fast RCNN算法详解_fast rcnn csdn
赞
踩
这篇博文来介绍Fast RCNN,是RCNN算法的升级版。RCNN系列算法看完后才写的这篇博客,相信初学者会比较容易这篇算法。
论文:Fast R-CNN
论文链接
解决的问题:
之所以提出Fast R-CNN,主要是因为R-CNN存在以下几个问题:1、训练分多步。通过上一篇博文我们知道R-CNN的训练先要fine tuning一个预训练的网络,然后针对每个类别都训练一个SVM分类器,最后还要用regressors对bounding-box进行回归,另外region proposal也要单独用selective search的方式获得,步骤比较繁琐。2、时间和内存消耗比较大。在训练SVM和回归的时候需要用网络训练的特征作为输入,特征保存在磁盘上再读入的时间消耗还是比较大的。3、测试的时候也比较慢,每张图片的每个region proposal都要做卷积,重复操作太多。
虽然在Fast RCNN之前有提出过SPPnet算法来解决RCNN中重复卷积的问题,但是SPPnet依然存在和RCNN一样的一些缺点比如:训练步骤过多,需要训练SVM分类器,需要额外的回归器,特征也是保存在磁盘上。因此Fast RCNN相当于全面改进了原有的这两个算法,不仅训练步骤减少了,也不需要额外将特征保存在磁盘上。
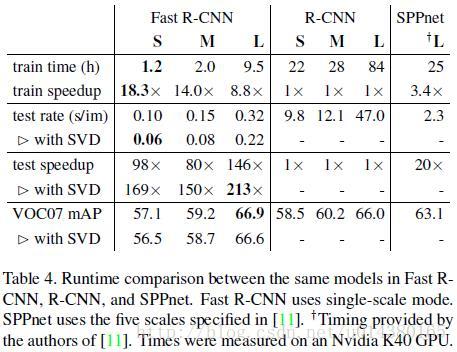
基于VGG16的Fast RCNN算法在训练速度上比RCNN快了将近9倍,比SPPnet快大概3倍;测试速度比RCNN快了213倍,比SPPnet快了10倍。在VOC2012上的mAP在66%左右。
算法概要:
算法的主网络还是VGG16,按训练过程和测试过程来讲会清晰点。
训练的过程:
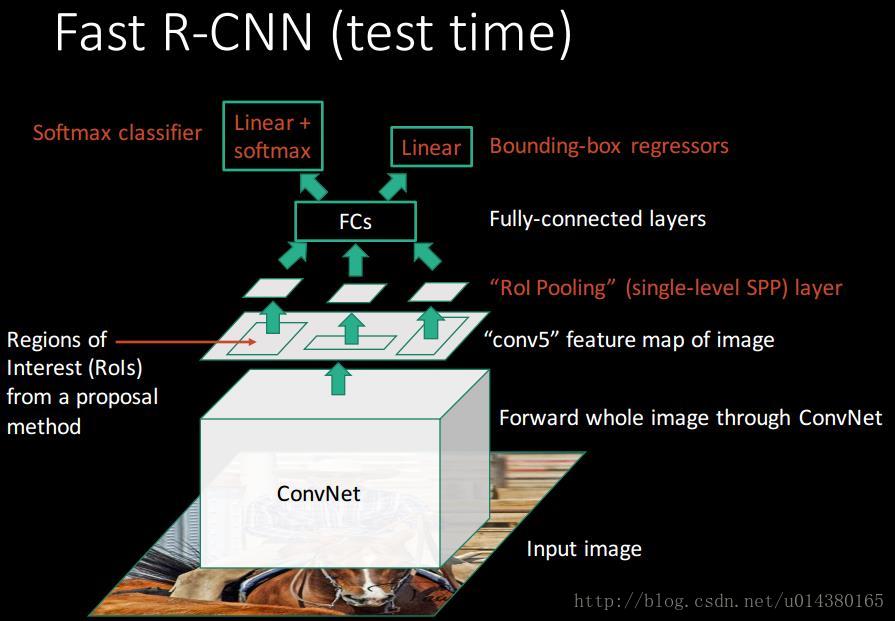
输入是224*224,经过5个卷积层和2个降采样层(这两个降采样层分别跟在第一和第二个卷积层后面)后,进入ROIPooling层,该层是输入是conv5层的输出和region proposal,region proposal的个数差不多2000。然后再经过两个都是output是4096的全连接层。最后分别经过output个数是21和84的两个全连接层(这两个全连接层是并列的,不是前后关系),前者是分类的输出,代表每个region proposal属于每个类别(21类)的得分,后者是回归的输出,代表每个region proposal的四个坐标。最后是两个损失层,分类的是softmaxWithLoss,输入是label和分类层输出的得分;回归的是SmoothL1Loss,输入是回归层的输出和target坐标及weight。
测试的过程:
与训练基本相同,最后两个loss层要改成一个softma层,输入是分类的score,输出概率。最后对每个类别采用NMS(non-maximun suppression)。
算法详解:
fast R-CNN的流程图如下,网络有两个输入:图像和对应的region proposal。其中region proposal由selective search方法得到,没有表示在流程图中。对每个类别都训练一个回归器,且只有非背景的region proposal才需要进行回归。
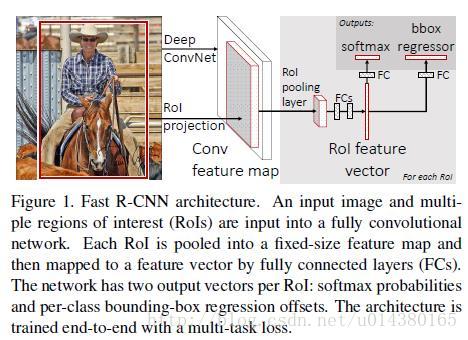
ROI pooling:ROI Pooling的作用是对不同大小的region proposal,从最后卷积层输出的feature map提取大小固定的feature map。简单讲可以看做是SPPNet的简化版本,因为全连接层的输入需要尺寸大小一样,所以不能直接将不同大小的region proposal映射到feature map作为输出,需要做尺寸变换。在文章中,VGG16网络使用H=W=7的参数,即将一个h*w的region proposal分割成H*W大小的网格,然后将这个region proposal映射到最后一个卷积层输出的feature map,最后计算每个网格里的最大值作为该网格的输出,所以不管ROI pooling之前的feature map大小是多少,ROI pooling后得到的feature map大小都是H*W。
因此可以看出Fast RCNN主要有3个改进:1、卷积不再是对每个region proposal进行,而是直接对整张图像,这样减少了很多重复计算。原来RCNN是对每个region proposal分别做卷积,因为一张图像中有2000左右的region proposal,肯定相互之间的重叠率很高,因此产生重复计算。2、用ROI pooling进行特征的尺寸变换,因为全连接层的输入要求尺寸大小一样,因此不能直接把region proposal作为输入。3、将regressor放进网络一起训练,每个类别对应一个regressor,同时用softmax代替原来的SVM分类器。
在实际训练中,每个mini-batch包含2张图像和128个region proposal(或者叫ROI),也就是每张图像有64个ROI。然后从这些ROI中挑选约25%的ROI,这些ROI和ground truth的IOU值都大于0.5。另外只采用随机水平翻转的方式增加数据集。
测试的时候则每张图像大约2000个ROI。
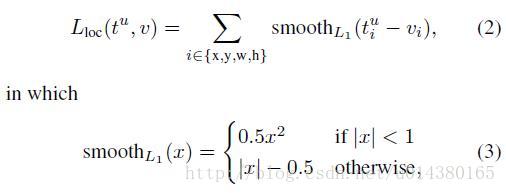
损失函数的定义是将分类的loss和回归的loss整合在一起,其中分类采用log loss,即对真实分类(下图中的pu)的概率取负log,而回归的loss和R-CNN基本一样。分类层输出K+1维,表示K个类和1个背景类。

这是回归的loss,其中t^u表示预测的结果,u表示类别。v表示真实的结果,即bounding box regression target。
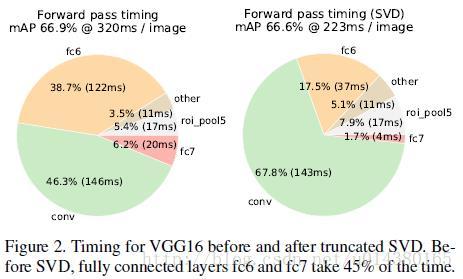
采用SVD分解改进全连接层。如果是一个普通的分类网络,那么全连接层的计算应该远不及卷积层的计算,但是针对object detection,Fast RCNN在ROI pooling后每个region proposal都要经过几个全连接层,这使得全连接层的计算占网络的计算将近一半,如下图,所以作者采用SVD来简化全连接层的计算。另一篇博客链接讲的R-FCN网络则是对这个全连接层计算优化的新的算法。
稍微总结下训练和测试的结构,如下面两个图,对算法的理解会更清晰。
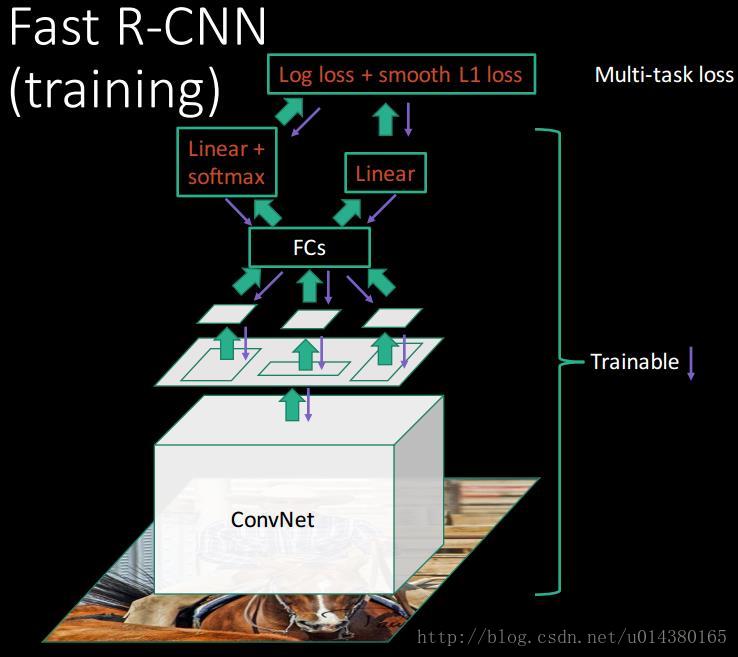
test结构图在ROI Pooling层是怎么输出的画得比较容易理解。
实验结果:
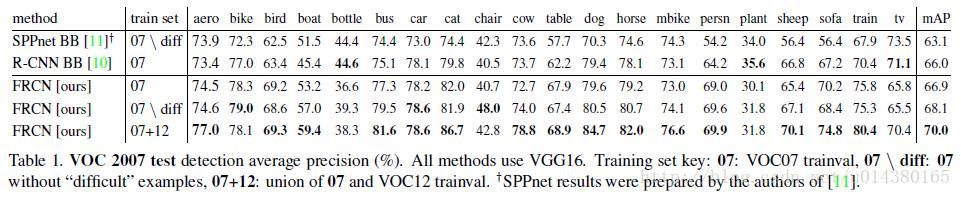
算法在mAP上的提升,这里仅截取VOC07的数据集结果。除了算法本身比其他算法的结果要好以外,还要注意到增加数据集对算法效果的提升也非常明显!所以你要知道为什么现在数据这么值钱!
算法在速度上的提升:
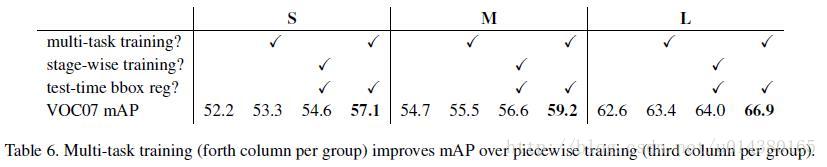
由于本文主要讲RCNN多步骤的网络结构合并在一起,因此需要实验证明这种multi-task训练的方式有效,实验对比结果如下:一共有S,M,L三个组,每个组有4列,分别表示:1、仅采用分类训练,测试也没有回归;2、采用论文中的分类加回归训练,但是测试时候没有回归;3、采用分段训练,测试时候有回归;4、采用论文中的分类加回归训练,且测试时候有回归。
这种multi-task在最近两年的object detection算法中非常普遍。
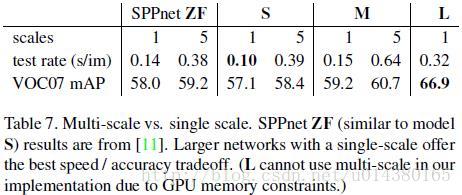
然后是多尺度和单尺度的对比:这里多尺度的5表示输入图像采用5中不同的尺寸,比如[480,576,688,864,1200],在测试的时候发现多尺度虽然能在mAP上取得一点提升,但是时间代价也比较大。作者直接给出原因:深度卷积网络可以学习尺度不变性。这个待研究。
总结:
Fast RCNN将RCNN众多步骤整合在一起,不仅大大提高了检测速度,也提高了检测准确率。其中,对整张图像卷积而不是对每个region proposal卷积,ROI Pooling,分类和回归都放在网络一起训练的multi-task loss是算法的三个核心。另外还有SVD分解等是加速的小贡献,数据集的增加时mAP提高的小贡献。
当然Fast RCNN的主要缺点在于region proposal的提取使用selective search,目标检测时间大多消耗在这上面(提region proposal 2~3s,而提特征分类只需0.32s),这也是后续Faster RCNN的改进方向之一。
参考资料:http://www.robots.ox.ac.uk/~tvg/publications/talks/fast-rcnn-slides.pdf


