
- 1【迅为iMX6Q】开发板 u-boot 2020.04 RTL8211E 以太网驱动适配_rtl8211e-vl速度驱动函数
- 2鸿蒙系统学习笔记_鸿蒙os学习日记小结
- 3使用Python成功调用大漠插件方法_python调用大漠插件
- 4Python 循环缓冲区_python 环形缓冲区
- 5FPGA图像处理的一些方法、原理和算法优缺点介绍
- 6python中异常处理--raise的使用
- 7Win10+VS2015+cuda10.1安装_将visualstudiointegration\extras\visual_studio_inte
- 8mybatis id字段由table自动生成 insert 时获取id_mybatis id怎么自动生成
- 9macOS 使用小技巧 - 设置文件默认打开方式_macos安装包打开方式选择什么
- 10鸿蒙Harmony应用开发—ArkTS声明式开发(基础手势:DatePicker)
助力智驾出海 —— 从功能层面解读欧洲智驾法规
赞
踩
九章数据库 |为了帮助大家更快速、更精准地把握产业变化方向和市场变化趋势,九章现正式推出智能驾驶产业数据库。更多数据库介绍请点击以下图片查看!欢迎各位扫描链接内文末二维码交流~

01
引言
近两年来,“出海”成为国内车企,尤其是新能源车企的新动向。无论是传统主机厂, 还是造车新势力,都开始陆续关注并发力海外市场,希望能够走出国门,在海外市场占据一席之地。尤其是欧洲,由于政策、市场等原因,成为国内车企出海的主要目标地区。
想要进入海外市场,首先就要遵守目标国家或地区的法规标准,满足当地的产品准入要求。其中,智能驾驶,作为中国汽车占领海外市场的重要方向,自然也要满足各国的法规要求。而欧洲国家关于智驾的准入法规要求最为全面,在全球其他区域也具有一定的“通用性”,因此欧洲的法规标准最值得国内研究。
下面的表1汇总了目前欧洲针对智能驾驶出台的准入法规(针对量产车型,L2级以下智能驾驶)。在各欧盟成员国以及英国、以色列、土耳其、巴基斯坦、摩洛哥等“泛欧盟区域”销售的车辆,都需要满足这些法规;另外,南美、澳洲、欧亚经济联盟国、日本、韩国等国,也会沿用表1中的部分法规。
实际上,这些准入法规,都包含在欧洲新GSR法规EU 2019/2144中,是GSR II对主动安全提出的要求。新车公告自2022年7月起,新上牌车辆自2024年7月起,都必须满足这些法规的要求。
在表1中的适用车型,采用的是国际通用的车辆分类标准,其中:
M表示四轮以上的载客车辆,分为M1、M2、M3等三类,M1——座位数小于等于9座,M2——座位数大于9座,且最大设计总质量小于等于5000kg,M3——座位数大于9座,最大设计总质量大于5000kg;
N表示四轮以上的载货车辆,分为N1、N2、N3等三类,N1——最大设计总质量小于等于3500kg,N2——最大设计总质量大于3500kg,小于等于12000kg,N3——最大设计总质量大于12000kg。
可以认为,M1属于乘用车,M2、M3、N1、N2、N3都属于商用车;但N1车辆质量小,欧洲法规通常将其与M1合并考虑。
表1 欧洲的智驾准入法规

从表1中可以看出,欧洲专门针对量产智能驾驶的准入法规(强制性法规)共有8项,覆盖的功能主要是车道保持(ELKS、LDWS)、盲区监测(BSIS、倒车监测、MOIS)、前向预警与紧急制动(AEBS)和智能车速辅助(ISA)等4种功能,对乘用车和商用车分别提出了不同的要求。
另外,E-NCAP(European New Car Assessment Programme)虽然不是准入法规,但对乘用车的AEB、FCW、LDW、LKA、ELK、BSD、ISA等功能也提出了明确的要求,并且具有权威性,通常在智驾开发时,也需要考虑,目前E-NCAP的最新版本是2023年版本。
下面,我们将从功能开发的角度,对欧洲的智驾准入法规和E-NCAP展开解读,阐述各项法规的要求,分析在产品开发的过程中应该注意哪些关键点。(如果读者要了解各项法规的具体认证和测试要求,建议直接阅读法规原文。)
02
车道保持:EU 2021/646 + UNECE R130 + E-NCAP
车道保持功能能够辅助驾驶员,控制车辆保持在车道内行驶,不偏出车道。根据辅助程度的不同,车道保持可分为偏离预警和自动纠偏。欧洲关于车道保持的法规主要有:适用于M1和N1车型的EU 2021/646,适用于M2、M3、N2、N3车型(商用车)的UNECE R130,以及适用于M1车型(乘用车)认证的E-NCAP。
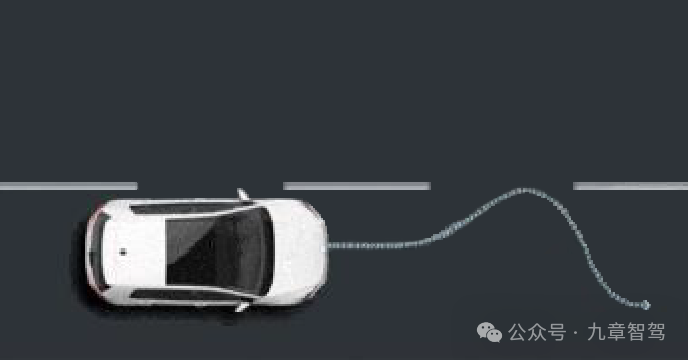
图1 车道保持功能示意图
EU 2021/646对紧急车道保持系统(ELKS,Emergency Lane-Keeping Systems)提出了型式认证规定和技术规范,适用于乘用车。其对ELKS的定义是:一种驾驶员辅助系统,只有在驾驶员无意间离开车道时,才应向驾驶员发出警告,并纠正轨迹。在EU 2021/646中,通过DTLM(Distance To Lane Marking)这一参数,对系统发出预警或自动纠偏的时机提出量化要求。DTLM的含义是:车辆越线之前,车道线内侧与轮胎最外侧之间的剩余横向距离,如图1所示。

图2 DTLM的定义
EU 2021/646中的ELKS包含了车道偏离预警(LDWS,Lane Departure Warning System)和方向纠偏功能(CDCF,Corrective Directional Control Function)两项功能。LDWS仅能发出警报,CDCF则通过控制车辆的转角或个别车轮的制动,纠正车辆的方向。
其中,对LDWS的要求是在65~130km/h(如果车辆最高车速达不到130km/h,则为65km/h~最高车速)的车速范围内可以激活,并能在DTLM>-0.3m前发出警报,警报方式二选一:①视觉、听觉、触觉中的至少两种;②听觉或触觉+车辆偏离方向的指示。
对CDCF的要求是在70~130km/h(如果车辆最高车速达不到130km/h,则为70km/h~最高车速)的车速范围内可以激活,并且保证DTLM>-0.3m。CDCF激活时,驾驶员对方向盘的控制力应小于50N,超出50N时,CDCF不能激活。此外,CDCF激活时,需向驾驶员显示视觉警报信号,警报时长>1s;如果CDCF作用时长超过10s,则需要同时提供声音警报。
需要注意的是,EU 2021/646要求当车辆已经越线时,ELKS只可以发出警报,即LDWS作用,而不能纠偏,即不能激活CDCF。这一点与目前国内多款车型的功能逻辑,是不一样的,国内常见的做法是,当车辆越线时,也可以提供自动纠偏功能。
UNECE R130是仅针对车道偏离预警系统(LDWS,Lane Departure Warning System)的法规,适用于商用车。其对LDWS的定义与EU 2021/646中的定义一致,是“当车辆意外偏离车道时,向驾驶员发出警报的系统”。
R130对LDWS的要求是车速超过60km/h时可激活,低于EU 2021/646要求的车速最低值。另外,R130对LDWS激活时的道路曲率提出了要求,道路曲率半径应大于250m。在警报方式上,R130与EU 2021/646的要求相同,都是以下方式二选一:①视觉、听觉、触觉中的至少两种;②听觉或触觉,加上车辆偏离方向的指示。
E-NCAP将车道保持作为乘用车安全辅助(Security Assistance)部分的一项功能,并定义为车道辅助系统(LSS,Lateral Support Systems),包含紧急车道保持(ELK,Emergency Lane Keep)、车道保持辅助(LKA,Lane Keep Assist)、车道偏离预警(LDW,Lane Departure Warning)等三项功能。与EU 2021/646不同的是,E-NCAP将纠偏功能根据紧急情况,分为LKA和ELK(两者的区别在于是否存在碰撞风险。)
E-NCAP采用DTLE(Distance To Lane Edge,与EU 2021/646中的DTLM类似)对LSS提出要求:LDW要求车辆在DTLE>-0.2m前发出警报;LKA要求车辆保持DTLE>-0.3m;ELK则与具体场景有关,车辆偏离实线时要求DTLE>-0.3m,车辆偏出道路边缘时要求DTLE>-0.1m,相邻车道有车时要求不发生碰撞。不过,以上要求都有相应的测试场景和工况作为前提,具体可以参考E-NCAP原文。
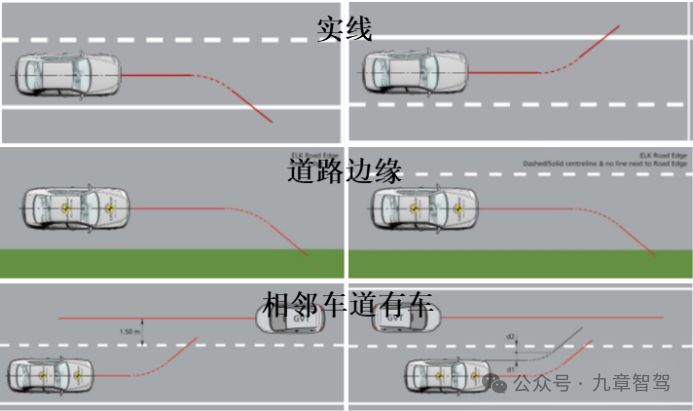
图3 E-NCAP中ELK的测试场景
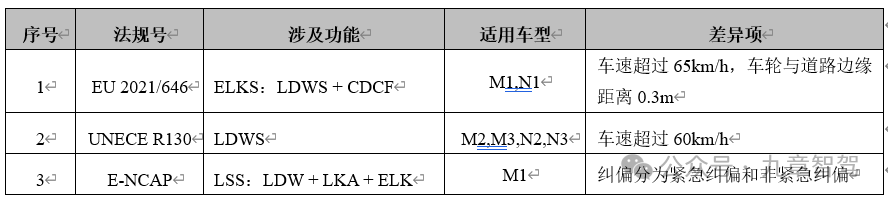
从以上分析可以看出,EU 2021/646、UNECE R130和E-NCAP三项法规,都对车道保持功能提出了明确的要求,但侧重点和具体的要求有所不同。如表2所示,车道保持功能主要依赖于对车道线与道路边缘的检测,因此需配置前视摄像头;如需满足E-NCAP对ELK的要求,还需要配置角雷达,以识别相邻车道的其他车辆。
表2 车道保持的法规对比
03
盲区监测:UNECE R151 + UNECE R158 + UNECE R159 + E-NCAP
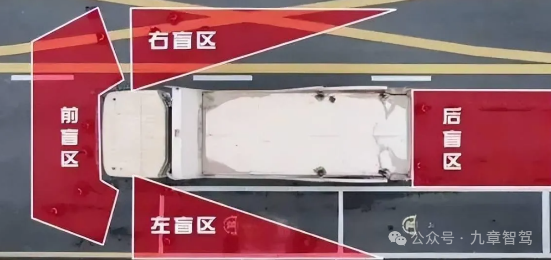
盲区监测功能能够实时检测车辆左右两侧的驾驶员视野盲区的交通环境,当车辆侧方存在碰撞风险时,向驾驶员发出警报。欧洲关于盲区监测的法规主要有适用于M2、M3、N2、N3车型(商用车)的UNECE R151和UNECE R159,适用于M、N车型的UNECE R158,以及适用于M1车型(乘用车)认证的E-NCAP。
 (a)乘用车盲区 |
(b)商用车盲区 |
UNECE R151是适用于商用车的强制法规,提出了对盲点信息系统(BSIS,Blind Spot Information System for the Detection of Bicycles)的要求,明确提出商用车需通过光学信号,提示驾驶员车辆周围存在自行车,并且可能发生碰撞。
R151主要针对商用车左、右两侧的盲区,要求能够检测到盲区内的自行车,并且强调在自车转向时,向驾驶员发出提示。R151要求的BSIS功能可用的车速范围是0~30km/h,车速相对较低。在此车速范围内,应该能够识别到速度为5~20km/h、与自车横向距离为0.9~4.25m、纵向距离为前向7m~后向30m(自车右前角为基准点)范围内的自行车。
UNECE R158是适用于所有M、N车型的法规,它要求车辆在倒车时,能够检测到车辆后方盲区内的弱势道路使用者(VRU,Vulnerable Road Users),包括乘用车与商用车的后方。R158所要求的功能,可以称为倒车监测功能,法规中提到了后视镜(Mirror)、电子外后视镜(CMS,Camera Monitor System)和倒车影像系统(RVCS,Rear View Camera System)等3种方式,来实现对车辆后方视野的VRU检测。其中,RVCS通过后摄像头检测后方盲区的环境,并向驾驶员显示,属于智能驾驶的提醒功能。
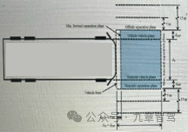
R158提出了对车辆后方环境检测范围的明确要求,包括视野范围(Field of Vision)和探测范围(Field of Detection),如图5所示。对于后方视野范围,要求能够显示图中区域的环境,并能看到图中第一排0.15m*0.15m的区域或第一排目标物的顶端,以及能够完整地看到第二排和第三排目标物。对于后方探测范围,要求能够探测到车辆后方的0.2m~1m范围内的障碍物,并向驾驶员发出警报提示。
 (a)视野范围 |
(b)探测范围 |

图5 UNECE R158要求的车辆后方环境检测范围
UNECE R159提出了对商用车的车辆起步信息系统(MOIS,Moving Off Information System for the Detection of Pedestrians and Cyclists)的要求,主要针对车辆前方盲区范围的行人和自行车(VRU)。MOIS功能可以在车辆低速(0~10km/h)时,实时检测前方盲区范围内的行人与自行车,并向驾驶员发出警报提示。
R159要求MOIS能够检测到车辆前方特定区域内,移动速度不超过10km/h的行人与自行车。R159定义了MOIS的认证测试场景,包括自车静止VRU穿行、自车静止VRU纵向移动和自车与VRU同时纵向移动等3种场景,如图6所示。同时,R159定义了明确的测试方法,包括对区域范围的要求,以及对移动速度的要求等,MOIS功能必须满足测试的要求。
 (a)自车静止VRU穿行 |  (b)自车静止VRU纵向移 |

(c)自车与VRU同时纵向移动
图6 UNECE R159要求的MOIS认证测试场景
E-NCAP对乘用车的盲区监测(BSM,Blind Spot Monitoring)提出了明确的测试规范,主要要求检测到左、右两侧盲区的机动车辆,并且测试场景的车速超过70km/h,可见针对的是高速场景;并且要求,测试时,盲区的车辆距离自车的横向距离是1.5m。另外,根据E-NCAP的要求,当盲区的车辆超过自车前端时,BSM即可停止,这一点与UNECE R151所要求的“前向7m”范围存在差异。
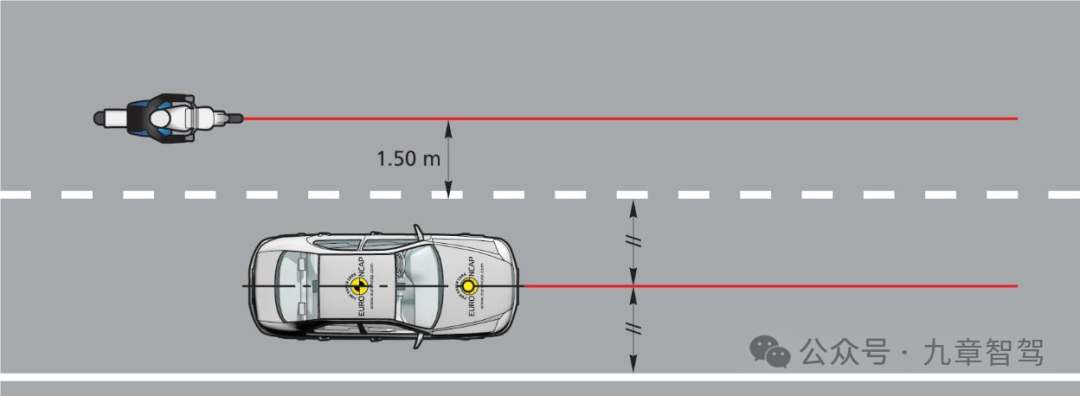
图7 E-NCAP中BSM的测试场景
可见,UNECE R151、R158、R159以及E-NCAP,分别提出了对车辆侧方、后方、前方盲区范围的检测要求,并且适用的车型和要求检测的目标物都有所不同,详见表3。通常,可以通过在车辆对应位置安装摄像头、毫米波雷达、超声波雷达等方案,满足盲区监测相关的法规要求,常见的传感器方案如图8所示。
表3 盲区监测的法规对比

(a)UNECE R151 BSIS |
(b)UNECE R158 RVCS |
(c)UNECE R159 MOIS |
(d)E-NCAP BSM |
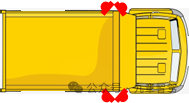




(e)传感器图例
图8 常见的盲区监测传感器方案
04
前向防撞:UNECE R152 + UNECE R131 + E-NCAP
前向防撞功能,是针对车辆前方物体的功能。系统能够检测到车辆前方存在障碍物且产生碰撞的风险,并根据辅助程度的不同,分为预警和紧急制动的效果。欧洲关于前向防撞功能的法规主要有适用于M1、N1车型的UNECE R152、适用于M2、M3、N2、N3车型(商用车)的UNECE R131,以及适用于M1车型(乘用车)认证的E-NCAP。

图9 前向防撞功能示意图
UNECE R152提出了对M1和N1车型的自动紧急制动系统(AEBS,Advanced Emergency Braking System)的明确定义:能够自动检测到即将发生的前方碰撞并激活车辆的制动系统,以使车辆减速,避免或减轻碰撞的系统。R152中定义的AEBS,包括前向碰撞预警和紧急制动的功能。
R152根据自车前方物体的类型不同,对于以下3种场景都提出了AEBS的要求:车对车(Car to Car)、车对行人(Car to Pedestrian)、车对自行车(Car to Bicycle),如图8所示。其中车对车场景,还分为前方静止车辆与前方移动车辆的情况,此时要求AEBS可激活的车速范围是10~60km/h;车对行人场景中,AEBS应该能够检测到横向移动速度不超过5km/h的行人,且可激活的车速范围是20~60km/h;车对自行车场景中,AEBS应该能够检测到横向移动速度10~15km/h的自行车,且可激活的车速范围是20~60km/h。
在3种场景中,R152都要求系统能够提供光学、声学、触觉的其中2种方式,向驾驶员发出警报,发出预警的时机应该早于紧急制动。在紧急制动时,R152要求的加速度需大于5m/s2。R152对3种场景允许的最大相对碰撞速度也以提出了明确要求——根据相对车速不同,要求了不同的最大碰撞速度,当相对车速为60km/h时,允许的最大相对碰撞速度为35km/h或40km/h,具体与场景和车型有关。
(a)车对车 |
(b)车对行人 |



(c)车对自行车
图10 UNECE R152的AEBS测试场景
另外,R152还对AEBS的误报警也提出了要求和明确的测试方法,需在图11所示的各类场景中,按要求进行测试。
(a)十字路口左转或右转 |
(b)前方车辆的左转或右转 |
(c)带有防护栏和固定物体的弯道 |
(d)因施工道路而变道 |



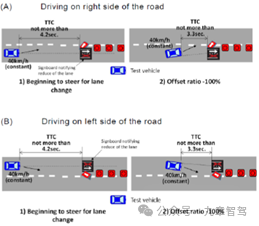
图11 UNECE R152要求的AEBS误报警测试场景
UN R131是针对商用车AEBS的法规,参考了R152的内容,因此与R152存在很多的相似之处,但由于适用的车型范围不同,仍存在差异。
R131对AEBS要求的场景是车对车场景和车对行人场景。在车对车场景中,R131要求AEBS可激活的车速范围的下限是10km/h,与R152一致,但车速范围上限值是车辆可达到的最大车速,超过R152要求的60km/h;对应地,所要求的最大相对碰撞速度也不相同。在车对行人场景中,R131要求的AEBS可激活车速范围与R152一致,为10~60km/h,但最大相对碰撞速度也不相同。
另外,R131要求车辆在紧急制动时,加速度的最小值是4m/s2,大于UN R152所要求的5m/s2。
E-NCAP提出了对乘用车的前方碰撞预警(FCW,Front Collision Warning)和自动紧急制动(Autonomous Emergency Braking)的要求,并且提出了非常细化的多种测试场景,覆盖车对车(Car to Car)、车对行人(Car to Pedestrian)、车对自行车(Car to Bicyclist)、车对摩托车(Car to Motorcyclist)等不同目标物,是日常行驶时容易遇到的场景。
在每种目标物场景中,E-NCAP根据目标物相对自车的移动方向、位置、速度,以及自车车速,提出了各类具体的测试场景和测试要求,甚至会区分白天、夜晚等不同的光照环境。典型的E-NCAP前向防撞测试场景如表4所示,各场景中还有更详细的要求,具体可查看E-NCAP原文。
表4 E-NCAP中前向防撞的典型测试场景

按照E-NCAP的要求,FCW和AEB需要在以上测试场景中,按规定的方法通过测试,得到相应的分数。E-NCAP针对每种场景,定义了一套完善的评分标准,主要根据碰撞时的车速、相对车速、触发FCW/AEB的时机、成功率、时长等,综合测评FCW/AEB的表现。
E-NCAP对前向防撞功能的测评,具有权威性和通用性。E-NCAP中的测试场景非常全面和经典,评分方法也非常完善,是FCW/AEB功能开发时的重要参考,感兴趣的读者可以阅读E-NCAP原文,了解更多内容。
通过以上分析可以看出,前向防撞相关的3项法规存在相似之处,尤其是UNECE R152与UNECE R131,互相参考的内容较多,而E-NCAP则最为全面和完善,尤其是对测试场景的定义,对功能开发具有很强的参考意义。但3项法规之间仍存在差异,详见表5。
前向防撞功能主要依赖对车辆前方目标物的检测,因此需配置前视摄像头,通常还会配置前向毫米波雷达,增加目标物识别的精度,尤其是测距能力。
表5 前向防撞的法规对比

05
智能限速:EU 2021/1958 + E-NCAP
智能限速功能可识别道路限速信息,并在驾驶员超速时,通过提示或控速的方式,帮助驾驶员将车速控制在限速范围内。欧洲关于智能限速功能的法规主要有适用于M1、N1车型的EU 2021/1958,适用于M1车型(乘用车)认证的E-NCAP;对于M2、M3、N2、N3车型,欧洲法规对智能限速不作要求。

图12 智能限速功能示意图
EU 2021/1958对智能车速辅助系统(ISA,Intelligent Speed Assistance)的定义是:一种通过提供专用和适当的反馈来帮助驾驶员保持适当速度,以适应当前道路环境的系统。EU 2021/1958定义的ISA包含3项子系统:限速信息功能(SLIF,Speed Limit Information Function)、限速警报功能(SLWF,Speed Limit Warning Function)和车速控制功能(SCF,Speed Control Function)。其中SLWF与SCF二者具备其一,就可以满足要求,也就是说,ISA = SLIF+SLWF/SCF或ISA = SLIF+SLWF+SCF。
EU 2021/1958要求ISA能够识别欧洲道路常见的限速标识,如图13所示。对于SLIF功能,要求能够在自车通过限速标识的2s或10m内显示给驾驶员,并且显示的限速信息,能够让驾驶员直观容易地看到,清晰易懂。同时,要求能够自动检测或手动设置国家代码,以适应不同国家的道路。
值得注意的是,EU 2021/1958要求SLIF需在欧盟境内的公共道路完成至少400km的路试以验证功能的可靠性,并且包含不少于15%的夜间环境,测试的道路类型应覆盖城市道路、非城市道路、高速公路等,且每种道路类型至少占总距离的25%。
对于SLWF功能,EU 2021/1958要求,当车辆超速时,提供视觉+听觉、视觉+触觉或仅触觉等3种方式之一的警报,提示驾驶员控制车速。SLWF对发出警报的时机和警报持续时间都有明确的量化要求,比如在车辆通过限速标识后1.5s内,必须发出视觉信号。对于SCF功能,要求减速度不大于3m/s2,并在车辆通过限速标识后1.5s内,开始控制车速。

图13 欧洲道路常见限速标识
E-NCAP对智能限速的要求,部分参考了EU 2021/1958,很多内容相似,但也存在不同之处。
E—NCAP定义的车速辅助系统(SAS,Speed Assist System)包含SLIF和SCF功能,。其中SLIF功能除了基本的限速信息显示(Basic SLIF)外,还包括条件限速(Conditional Speed Limits)、道路特征(Road Features)、局部风险(Local Hazards)、系统升级(System Updates)等进阶功能,以及超速预警功能(Warning Function);SCF功能包括手动限速(SLF,Speed Limitation Function)、自动限速(ISL,Intelligent Speed Limit)和iACC(Intelligent ACC)等功能。
可以看出,E-NCAP定义的SLIF,包含了EU 2021/1958中的SLIF和SLWF,并且,E-NCAP的SCF,比EU 2021/1958的SCF所定义的功能更多。
对于Basic SLIF和ISL子功能,E-NCAP的具体要求与EU 2021/1958相似;对于其他新增功能,E-NCAP提出了一套评分标准,可以按该标准综合评价SAS的表现。其中,手动限速SLF是指驾驶员手动设置速度上限值,作为车辆应遵守的限速要求,与自动限速ISL是独立的2个功能;SLF可设定的车速范围是30~130km/h。
可见,EU 2021/1958与E-NCAP都对智能限速提出了明确的要求,其中EU 2021/1958的标准较为基础,E-NCAP在此基础上增加了更多的子功能。智能限速功能依赖摄像头识别道路限速标识,因此需配置前视摄像头;另外,如果能结合高精地图、导航地图的限速信息,效果会更好。
表6 智能限速的法规对比

结语:智能汽车出海如何满足欧洲法规
通过本文对欧洲智驾相关法规的解读,可以发现,目前欧洲对智能驾驶的强制要求集中在主动安全功能。同时,由于交通环境的不同,对于同一项功能,欧洲与国内的法规要求会存在差异,如智能限速识别的要求等。
另外,除了以上智驾相关的法规标准外,出海到欧洲的车辆,还需要同时满足其他要求,如对驾驶员监测系统、信息安全、环保等方面的要求,这些也是主机厂或相关供应商在出海时需要考虑并满足的。
虽然功能本身比较简单,但仍需严格按法规的要求,重新定义和开发。
那么,在产品开发时,需要做哪些工作,来满足欧洲法规的要求呢?我们认为主要有以下几点:
第一,根据法规对各项功能的检测范围要求,制定对应的硬件方案,主要是传感器方案。
前文也提到过,法规所要求的不同功能,对传感器配置的需求也不同,汇总如表7所示。
表7 满足欧洲法规的传感器配置

第二,根据各项法规的要求,重新定义性能参数,以及HMI交互策略。
以前向防撞为例,对出发预警的时机、触发自动制动的时机、制动时加速度等重要参数,都需要按R152/R131/E-CNCAP的明确要求,调整参数,让性能满足法规。
再以智能限速为例,由于欧洲与国内的道路限速标识不同,因此需要按欧洲的道路限速标识来训练感知模型,以满足法规对限速标识识别能力的要求。
此外,主动安全功能涉及到大量的警报、提示,法规对具体的警报策略也提出了明确的定义,包括警报方式、图标形式、持续时长等,因此需要根据法规调整HMI交互策略。
第三,按法规要求完成测试与认证,以证明所开发的产品满足法规要求,能够进入欧洲市场。
以上各项法规所要求的测试场景和方法,有些可以在国内实现,但有些必须在欧洲完成,例如ISA功能,甚至明确要求要有400km以上的欧洲公共道路实测,因此需要专门重新制定测试方案。
同时,需要按相关流程,通过欧洲官方的认证,获得准入资质。国内目前已经有公司可以代理完成相关认证,但所需的材料仍需开发者自己准备。
第四,完成所需的欧洲道路数据采集,以满足算法开发所必须的数据样本要求,最典型的是智能限速功能,采集欧洲的道路交通标识。
不过,需要注意的是,数据采集是需要资质的,并且需要按欧盟的要求如《通用数据保护条例》(GDPR,General Data Protection Regulation)等,进行脱敏、保密等处理,因此也需要符合特定的流程,并且通常需要寻找数据服务公司合作。

图14 欧洲数据采集流程
END
国内AI产业最大的瓶颈不在技术,而在公司管理。
受文理分科过早的影响,多数纯技术背景的创业者及职业经理人的知识结构存在明显短板——人文素养和商业思维都很弱,甚至沟通能力严重欠缺。
这个公众号的定位是:帮AI产业的管理者们提升管理能力。

交流群 | 进“传感器群/滑板底盘群/汽车基础软件群/域控制器群”请扫描下方二维码,添加九章小助手,务必备注交流群名称 + 真实姓名 + 公司 + 职位(不备注无法通过好友验证)

写在最后
注:加微信时务必备注您的真实姓名、公司、现岗位,谢谢!
推荐阅读:
◆智能驾驶“正规军”与“杂牌军”的关键区别:是否具备系统性思维

