
- 1常用的正则表达式_∴′:“
- 2Android drawable/mipmap 适配走过的坑_android mipmap-xxhdpi
- 3最小二乘法的平方损失函数的推导_平方误差函数求导
- 42022春招各大厂高频面试题汇总_力扣2022春招高频面试题
- 5图像检索(一)--综述_图像检索综述
- 6Spring-Kafka笔记整理
- 7Android binder入门(一)——AIDL实现调用第三方登录_aidl登录
- 8YOLO7 口罩识别实战_基于yolov7的口罩检测
- 9oracle distinct分页优化_SQL 优化极简法则,还有谁不会?
- 10docke内部访问外部mysql问题解决_dockcompose 配置数据库无法登录
第1章 机器人概述_球坐标型工业机器人
赞
踩
第1章 机器人概述
机器人背景知识
1.1.1 为什么发展机器人
- 提高生产效率,降低人的劳动强度
- 让机器人做人不愿意做的事情或做不好的事情(有毒,高温高压。。。。)
- 让机器人做人做不了的事情(对原子搬迁,清理血管机器人…)
2. 机器人三原则
- 机器人不应伤害人类,且在人类受到伤害时不可袖手旁观;
- 机器人应遵守人类的命令,除非这种服从有害于人类;
- 机器人必须保护自身不受伤害,除非为了保护人类或者是人类命令它作出牺牲 。
1.1.2 机器人的定义
不同国家对机器人有不同的定义,参照别人的定义后可认为:
-
是像人或人的上肢,并能模仿人的动作;
-
具有智力或感觉与识别能力;
-
是人造的机器或机械电子装置。
1.1.3 机器人的发展及应用
1、古代机器人
- 西周时期已经出现了能歌善舞的伶人
- 春秋时期鲁班的木鸟
2、现代机器人
- 1948年,阿尔贡开发了机械手
- 1954年,美国戴尔沃提出工业机器人概念
- …
3、我国机器人发展现状
日本和美国在20世纪60年代就已经开始进行机器人的研究,与他们相比较,我国还存在较大的差距,因此需要更多的人加入到发展机器人的事业中来。
1.2 机器人的特点、结构与分类
1.2.1 机器人的主要特点
1. 通用性
- 可执行不同功能和完成不同任务的能力取决于其几何特征和机械能力。
- 一般自由度越多,通用性越强
2. 适应性
主要指其对工作环境变化的适应能力。
- 传感与测量环境变化的能力
- 分析任务和执行操作规划的能力
- 自动执行指令能力
1.2.2 机器人系统的结构
1、三大部分包括6个子系统:
- 机械部分(驱动系统、机械系统)
- 传感部分(感知系统、机器人-环境交互)
- 控制部分(人机交互系统、控制系统)
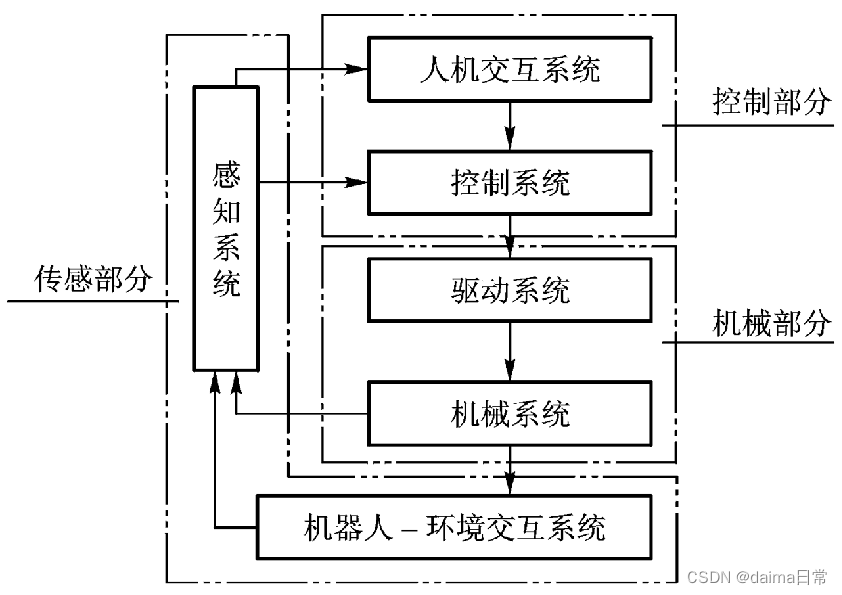
1.2.2 机器人系统的结构
1.机械结构系统
机械结构系统是机器人的主体部分,由基座、手臂、末端执行器三大件组成。
- 如果基座具备行走机构便构成行走机器人
- 如果基座不具备行走及腰转机构,构成单机器人臂
- 手臂一般由上臂、下臂和手腕组成。
- 末端执行器连接在机械手的最后一个关节上。
2.驱动系统
- 驱动系统是使各种机械部件产生运动的装置。
- 根据驱动源的不同,驱动系统可分为液压、气动和电动三种以及把它们结合起来应用的综合系统。
3.控制系统
控制系统的任务:是根据机器人的作业指令程序以及从传感器反馈回来的信号支配机器人的执行机构去完成规定的运动和功能。
- 机器人不具备信息反馈特征,为开环控制系统。若具备信息反馈特征,则为闭环控制系统。
- 根据控制原理,控制系统又可分为程序控制系统、适应性控制系统和人工智能控制系统。
- 根据控制运动的形式,控制系统还可分为点位控制和轨迹控制。
4.感知系统
感知系统由内部传感器模块和外传感器模块组成,获取内部和外部环境状态中的有意义的信息,通过这些信息确定机械部件各部分的运行轨迹、速度、位置和外部环境状态,使机械部件的各部分按预定程序或者工作需要进行动作。
5.机器人-环境交互系统
机器人—环境交互系统是实现机器人与外部环境中的设备互相联系和协调的系统。
6.人机交互系统
人机交互系统是实现操作人员参与机器人控制并与机器人进行联系的装置。通常指输入和输出设备。
1.2.3 机器人的分类
1. 按几何结构来分
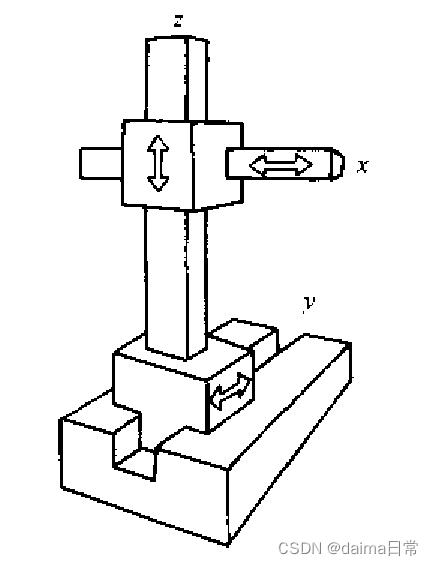
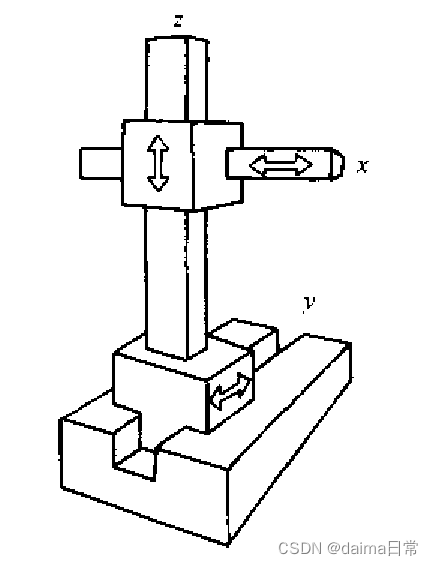
1.直角坐标机器人
这一类机器人其手部空间位置的改变通过沿三个互相垂直的轴线的移动来实现,即沿着X轴的纵向移动,沿着Y轴的横向移动及沿着Z轴的升降 。
**特点:**该形式机器人的位置精度高,控制无耦合、简单,避障性好,但结构较庞大,动作范围小,灵活性差,难与其他机器人协调;移动轴的结构较复杂,且占地面积较大。
2. 圆柱坐标机器人
这种机器人通过两个移动和—个转动实现手部空间位置的改变。
**特点:**圆柱坐标型机器人的位置精度仅次于直角坐标型,控制简单,避障性好,但结构也较庞大,难与其他机器人协调工作,两个移动轴的设计较复杂。
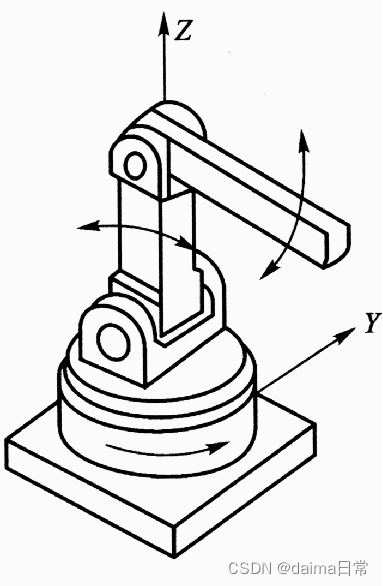
3. 球坐标机器人
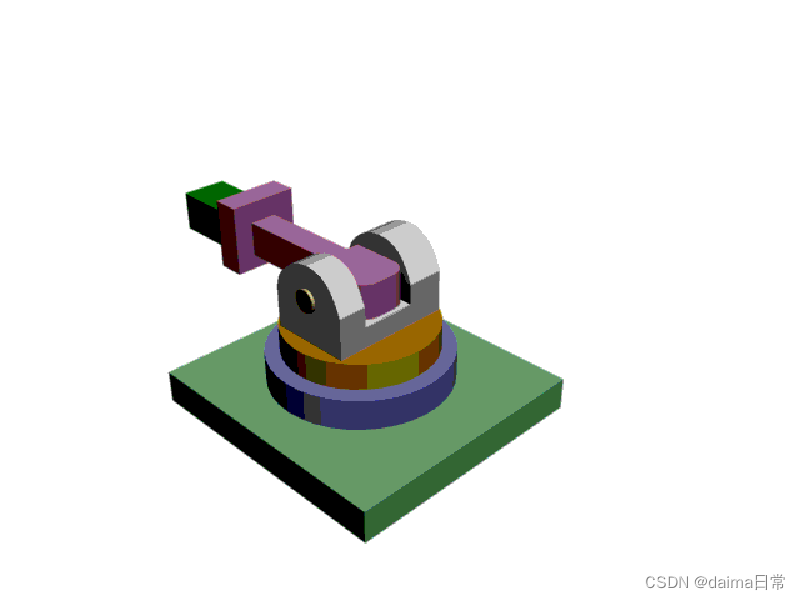
球坐标机器人采用球坐标系,用一个滑动关节和两个旋转关节来确定部件的位置,再用一个附加的旋转关节确定部件的姿态。
**特点:**可以绕中心轴旋转,中心架附近的工作范围大,两个转动驱动装置容易密封,覆盖空间较大。但该坐标复杂,难于控制,且直线驱动装置仍存在密封和工作死区问题。球坐标机器人的工作范围呈球缺状。
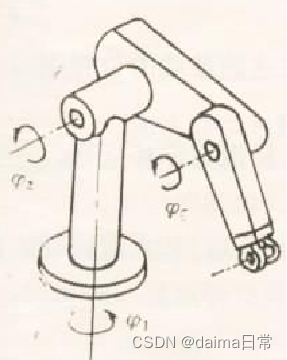
4. 关节坐标机器人
关节机器人的关节全部都是旋转的,类似于人的手臂,主要由立柱、前臂和后臂组成 。
**特点:**其结构最紧凑,灵活性大,占地面积最小,工作空间最大,能与其他机器人协调工作,避障性好,但位置精度较低,有平衡问题,控制存在耦合,故比较复杂,这种机器人目前应用得最多。
5. 平面关节式机器人
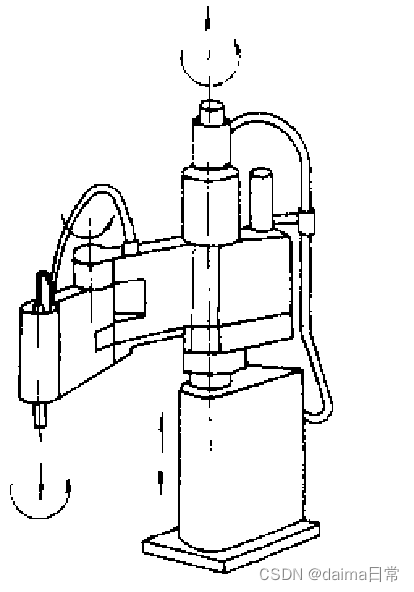
这种机器人可看作是关节坐标式机器人的特例,只有平行的肩关节和肘关节,关节轴线共面。
*2、按照驱动形式分为5种机器人:
- 气压驱动
- 液压驱动
- 电驱动包括:
- 直流伺服驱动
- 交流伺服驱动
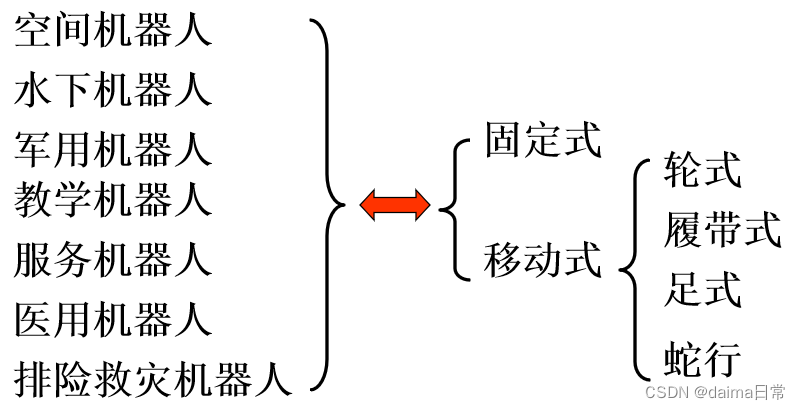
3、按用途划分
-
- 工业机器人
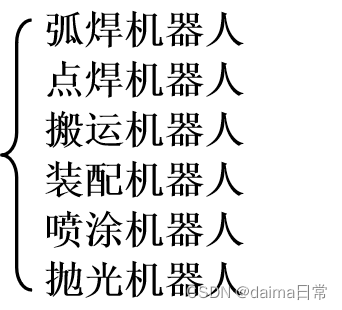
- 2.特种机器人
4、按智能水平划分
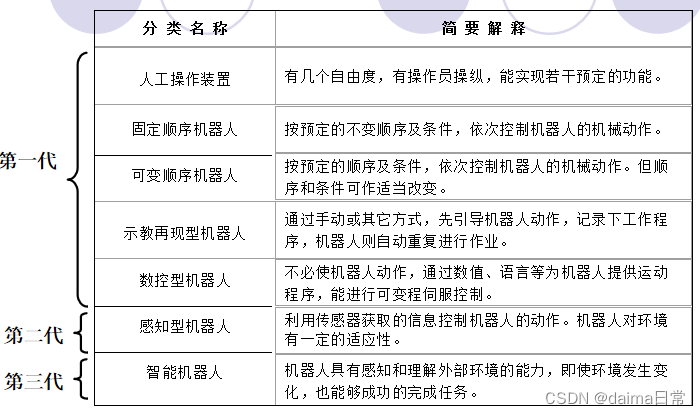
5、按机器人的性能指标分类
| ⑴超大型机器人 | 超大型机器人的负载能力为1000 kg以上。 |
|---|---|
| ⑵大型机器人 | 大型机器人的负载能力为100—1000 kg,作业空间为10m2以上。 |
| ⑶中型机器人 | 中型机器人的负载能力为10—100kg,作业空间为l一10m2。 |
| ⑷小型机器人 | 小型机器人的负载能力为0.1—10kg,作业空间为0.1一lm2。 |
| ⑸超小型机器人 | 超小型机器人的负载能力为0.1kg以下,作业空间为0.1m2以下。 |
1.3 相关术语及性能指标
1、自由度(Degree of freedom) :或者称坐标轴数
**定义:**自由度是指机器人所具有的独立坐标轴运动的数目,不包括末端执行器的开合自由度。
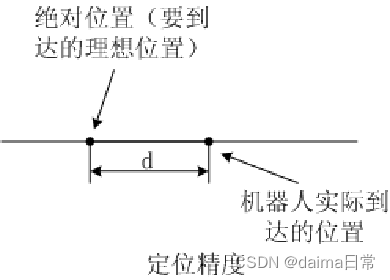
2、定位精度
**定义:**指机器人手部实际到达位置与目标位置之间的差异,描述正确性。
3、重复性或重复精度
**定义:**重复定位精度是指机器人重复定位其手部于同一目标位置的能力,可以用标准差这个统计量来表示,它是衡量一列误差值的密集度,即重复度。
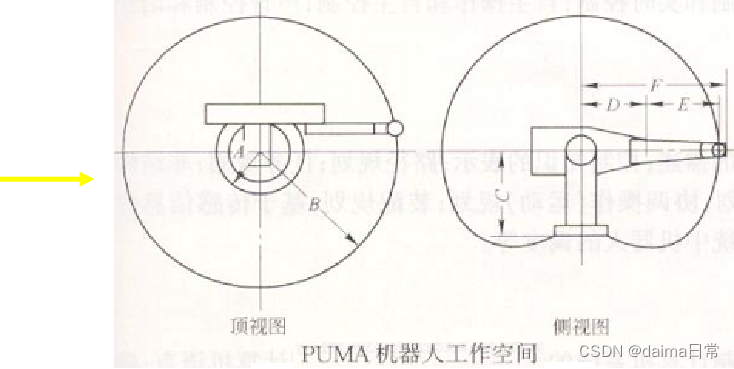
4、工作空间
定义:工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫做工作区域。一般不包括末端操作器本身所能到达的区域。
6、速度
速度和加速度是表明机器人运动特性的主要指标。最大工作速度,有的厂家是指机器人主要自由度上的最大稳定速度,有的厂家指手臂末端最大合成速度。
7、承载能力
**定义:**承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
本章小结:
- 机器人的外型不一定像人
- 机器人技术是集机械学、力学、电子学、 生物学、控制论、人工智能、系统工程等多种学科于一体的综合性很强的新技术.
- 重点掌握机器人的技术参数

