
热门标签
热门文章
- 1浙政钉踩坑记录:真机调试-H5APP 不存在_gdt-jsapi
- 2Flutter开发入门——Widget和常用组件
- 3数据库连接池_c3p0.properties
- 43.vueuse-createFetch实现接口请求及其封装(代替axios)
- 5AI 绘画工具 Stable Diffusion 本地安装使用_国内chilloutmix_niprunedfp32fix.safetensors 下载
- 6mmsegmentation教程1:自定义数据集、config文件修改、训练教程
- 7ping connect:网络不可达 /未知的服名称或服务_ping connect 网络不可达
- 8Java使用ffmpeg实现从视频中提取音频 (mp4、mp3)_java 视频转音频
- 9TensorFlow(1)——数据读取的三种方式_数据步中对应的读取模式有
- 10Nginx访问本地静态资源文件,root,alias详解_alias只能访问本机
当前位置: article > 正文
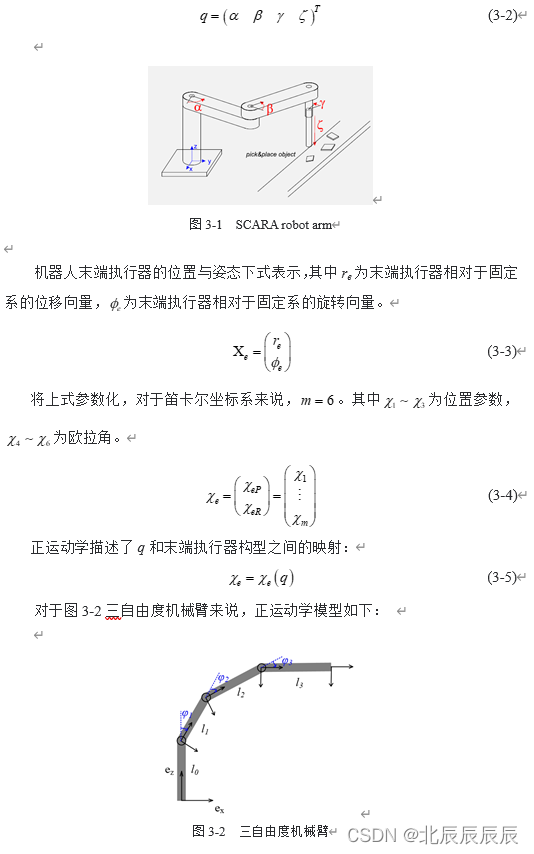
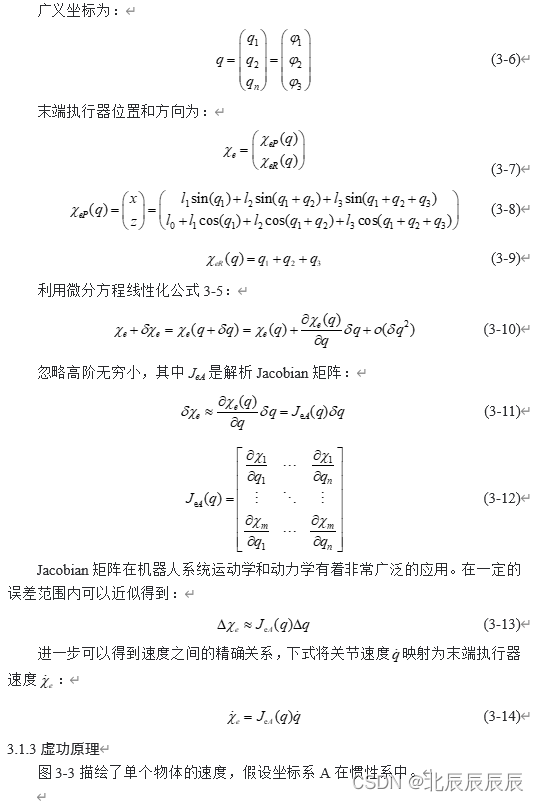
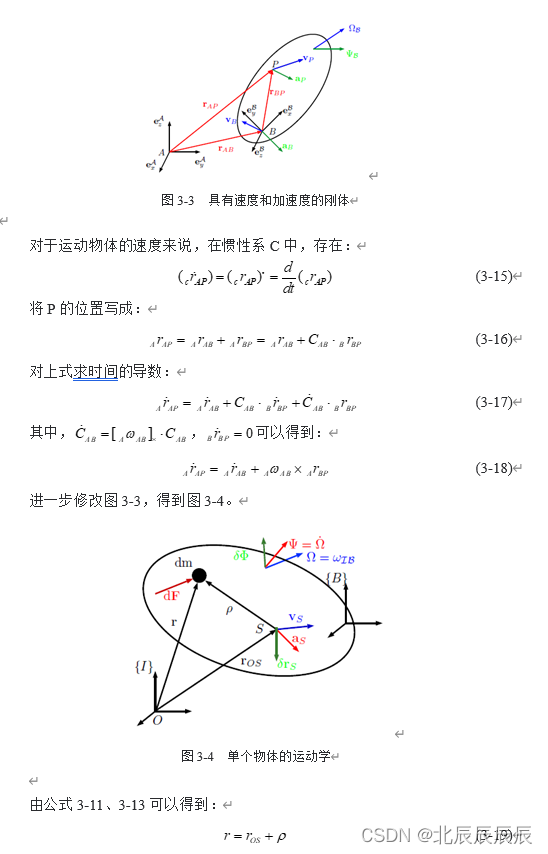
机器人坐标系解读及四足机器人虚拟模型控制(VMC)控制方法
作者:我家自动化 | 2024-03-20 09:57:11
赞
踩
虚拟模型控制
终于理清VMC控制方法了,对于很多新入门机器人的小伙伴,尤其像我这样做毕设前完全没有接触过机器人的本科生来说,坐标变换可谓是一大难,很多教材说的也是非常一本正经,非常不利于入门学习。本文对四足机器人坐标变换以及VMC控制方法作以简要介绍,力求简单易懂。
以下内容主要节选自我的毕业设计,迫不及待分享给大家,但涉及到毕业,禁止未经允许转载或抄袭,不要学术不端。

主要参考文献:
1.ETH机器人讲义
2.《四足机器人对角小跑步态虚拟模型直觉控制方法研究》谢惠祥 国防科大
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/272503?site
推荐阅读
相关标签

