
- 1C++多线程:Lambda表达式_c++ lamda thread
- 2【算法】Java实现RSA算法_java rsa
- 3观“边缘计算+5G:赋能边缘,共塑未来”有感_李新明 空天院
- 4积分梳状滤波器CIC原理与实现_cic滤波器
- 5【Python】PySpark 数据处理 ② ( 安装 PySpark | PySpark 数据处理步骤 | 构建 PySpark 执行环境入口对象 )_pyspark安装
- 6Python程序编译与反编译_pyinstxtractor
- 7Ubuntu16.04下部署Nginx+uWSGI+Flask_ubuntu16.04 linux uwsgi+nginx+flask
- 8elsiver投稿系统Editorial manager出现bug解决方法_build pdf for approval 弹不出来
- 9国内外大数据经典案例研究_大数据应用的典型案例和分析
- 10编程语言鄙视链,刷力扣(Leetcode)选择什么语言刷更好?_力扣怎么选择编程语言
FOC原理
赞
踩
目录
4.FOC整个框图总结
1.FOC的简介。
FOC就是一种控制无刷电机的算法。可以精确地控制磁场的大小与方向。称为磁场矢量控制。
2.FOC与六步换相比较。
| 控制方式 | 优点 | 缺点 |
| 六步换相 | 控制算法相较简单 | 精度差、运转不流畅、 转矩波动大、存在一定的电流噪声、适用于对电机转动性能要求不高的场合 |
| FOC | 转矩平稳、效率高、噪声小、动态响应快 | 硬件成本较高、对MCU性能有较高要求、控制算法难度 |
一般六步换相更适用于BLDC。FOC更适用于PMSM。但两者都可以通用。
3.FOC的控制核心。
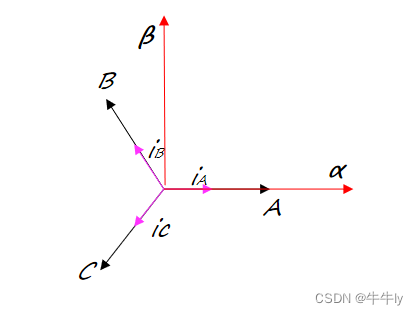
1.Clark变换原理
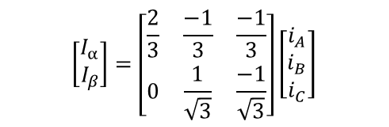
把采集到的三相电流ia,ib,ic转为两相ialpha,ibeta。如下图所示:
公式推导:如下图可以看出iA全部作用于α上。而iB,iC一半在α上一半在β上。
可以得到如下公式:

把角度换成数值如下:
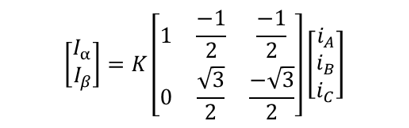
会发现上面的公式有一个K值。K是一个系数。如果是等幅值变换就是2/3,如果是等功率就是根号2/3.这里采用等幅值。具体2/3是怎么推导的可以参考如下链接:
https://blog.csdn.net/u013581448/article/details/105983186/
乘上系数如下:
整理就可以得到如下公式:

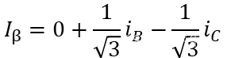
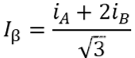
在因为基尔霍夫第二定律:流入节点电流等于流出节点电流之和。只需要求出两相电流即可。就可以求出第三项。
![]()
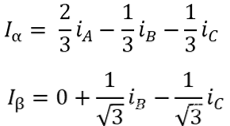
最后利用如上三个公式.
![]()
利用三个公式求出Iα与Iβ
![]()
2.park变换
将电机从两相静止坐标系变换到随转子转动的坐标系(dq轴)。相当于从非线性转换为线性。从而避免了对于非线性的控制从而使得控制变得简单。
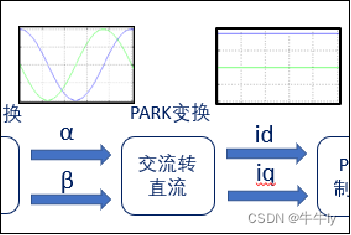
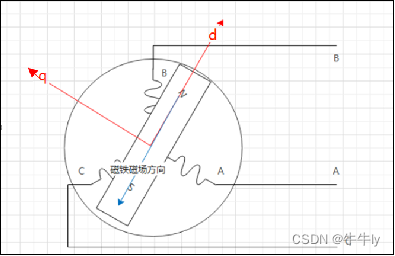
d轴方向与转子内磁场方向重合,称为直轴;q轴方向与转子内磁场方向垂直,称为交轴。
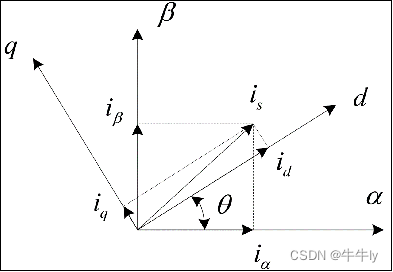
Park变换公式的推导:
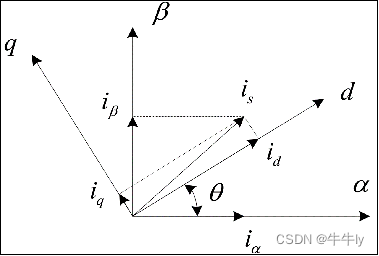
把 α,β转θ角度转成iq,id。θ代表的是电角度可以用个霍尔传感器与编码器测得。公式如下:

整理后如下求出的id,iq如下:


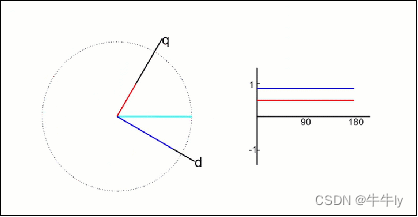
总结:d - q 坐标系是始终跟着转子旋转的。
Id和Iq是恒定不变的两个值。
这个坐标系下两个控制量都被线性化了。
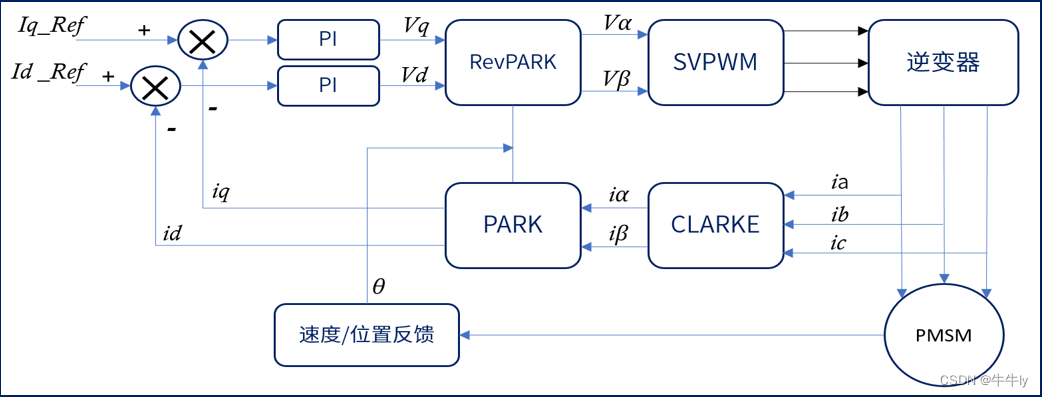
3.PID或者PI控制。(以电流环)
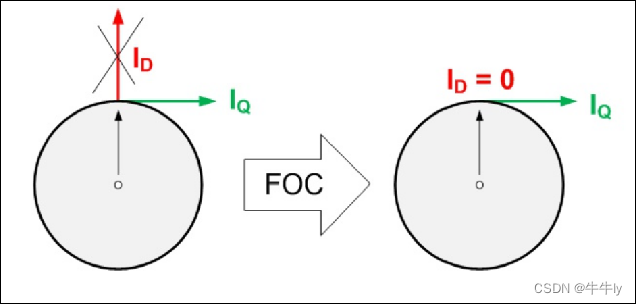
由于d轴方向与转子内磁场方向重合,称为直轴;q轴方向与转子内磁场方向垂直,称为交轴。
iq是我们需要的。代表了期望的力矩输出。id是我们不需要的。我们希望尽可能把它控制为0。
当然也可以是多闭环。比如加入位置环与速度环。
4.反Park变换。
经过PID控制后算出Vd,Vq。这里需要注意的是因为FOC最终还是需要用正弦波控制。正弦波也正是实现FOC的关键。所以又要从线性转为非线性的。SVPWM算法的实现也需要用到静止的坐标系α,β。
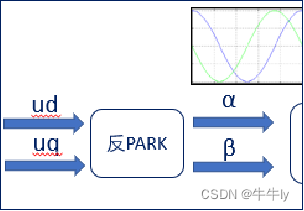
把vq,vd旋转 θ角度从而转vα,vβ。
公式如下:

整理得出如下:


5.SVPWM
而正弦波正是FOC驱动无刷电机的手段。正弦波怎么产生。从而引出SVPWM。
用PWM去近似地模拟正弦波(但不是真正意义上的正弦波)
SVPWM算法的目的,就是使用逆变电路的6个开关状态把在空间中旋转的任意矢量表示出来,我们把这个矢量称为空间电压矢量。
SVPWM算法实际上计算的是三相逆变器的六个开关何时导通,何时切断。
三相逆变电路(三个半桥)如下:
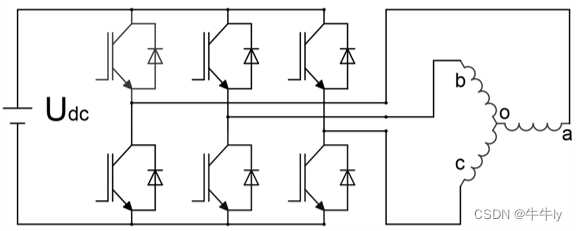
Udc:母线电压
SVPWM的解析:



非零矢量:有电压差。零矢量:无电压差。
我们对其中一个非零矢量进行分析:比如U4(100)就是Sa上桥臂导通。Sb,Sc就是下桥臂导通。如下:
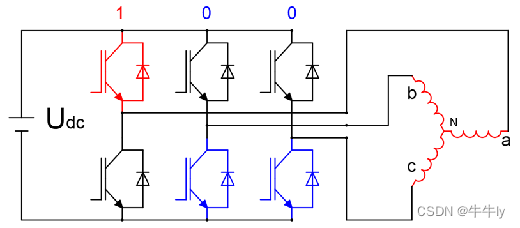
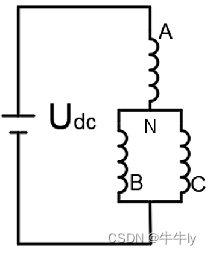
Ra=Rb=Rc 所以:UAN=2/3udc,UBN=-1/3udc UCN=-1/3udc
其他组合情况同理可得:

非零矢量的幅值相同,均为2/3Udc.零矢量的幅值为0.
https://zhuanlan.zhihu.com/p/414721065
坐标系表示空间矢量
以U4(100)合成的空间电压矢量(以指向中心点O的方向为负,反之为正,如A相OA正,AO负),即:U4的空间矢量就可以得到。

其余的空间电压矢量,同理可以得出:
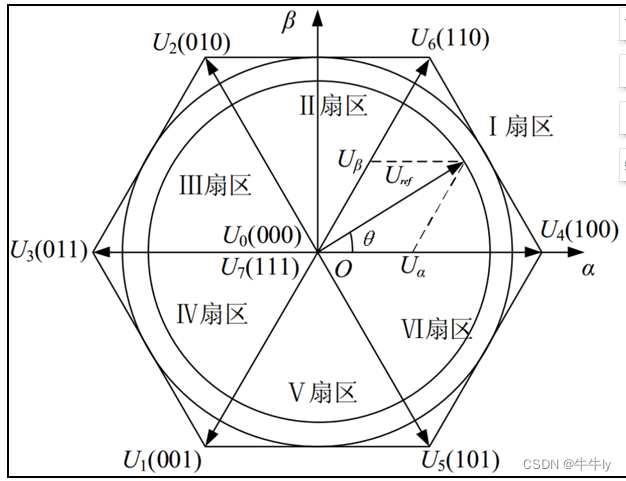
这8种开关组合只能合成6个方向的空间电压矢量。而我们最终的目的要知道任意的空间矢量。怎么计算?
方法:
在一个扇区内,相邻两个电压矢量以及零矢量,按伏秒平衡的原则来合成该扇区内的任意电压矢量 ,即:
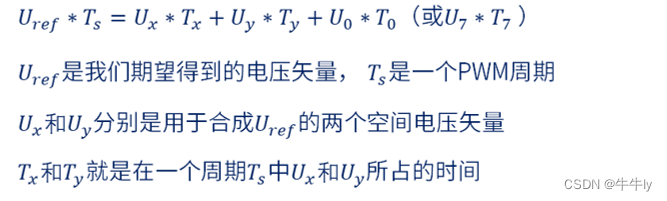
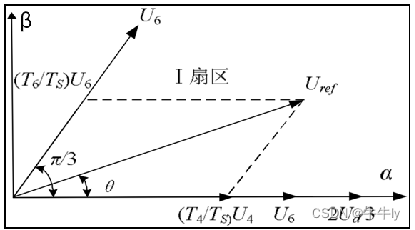
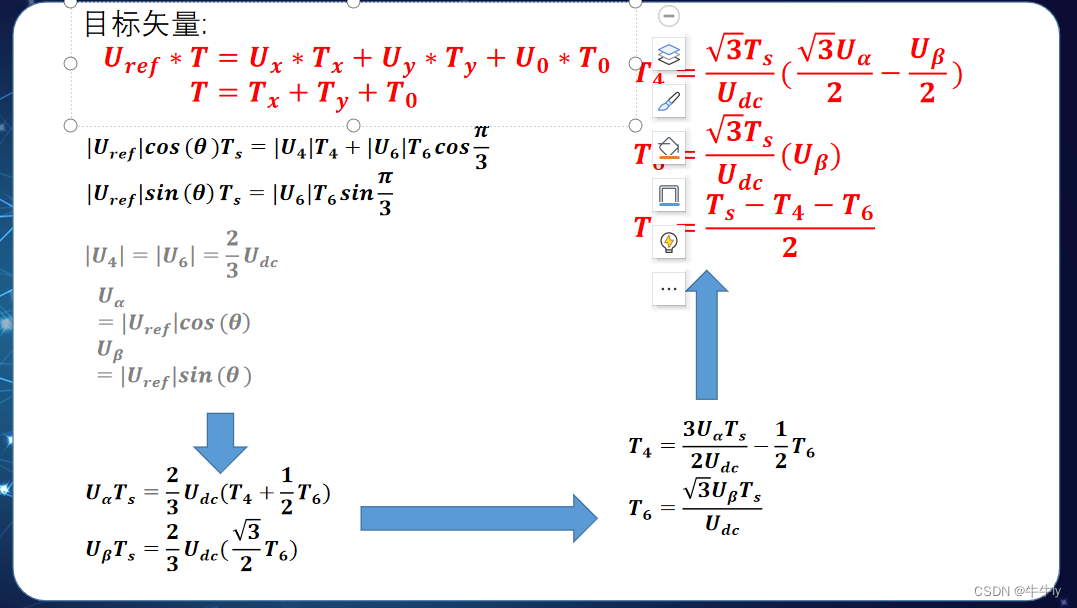
结论:只要合理地配置相邻的两个基向量和零矢量在一个周期中的占比,就可以合成出等效的任意空间电压矢量了。怎么计算相邻电压矢量与零矢量在一个周期内的时间占比。假如在扇区1:
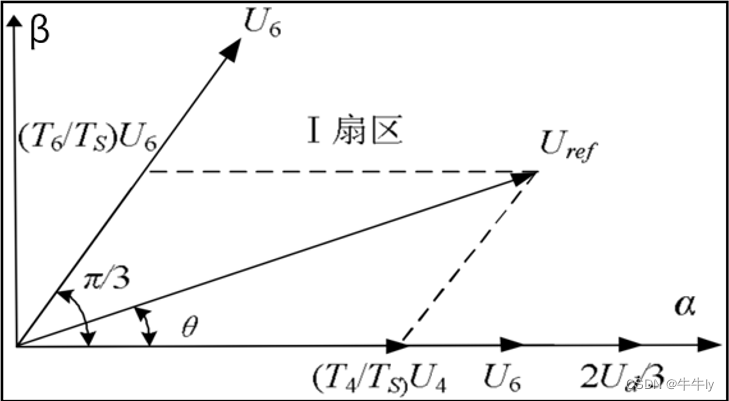
带入公式如下:
![]()
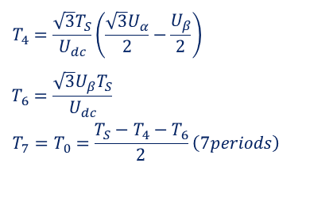
根据坐标图可以得出如下:

最终求出相邻电压矢量与零矢量在一个周期内的时间占比。相邻电压矢量与零矢量在一个周期内的时间占比不同就可以表示任意位置的空间矢量。
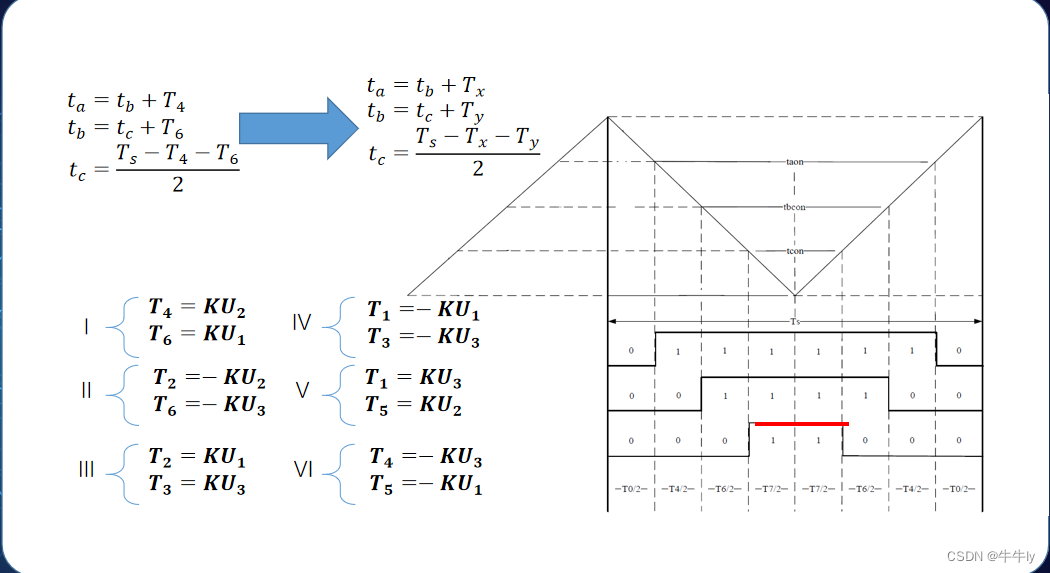
SVPWM分为7段式与5段式。
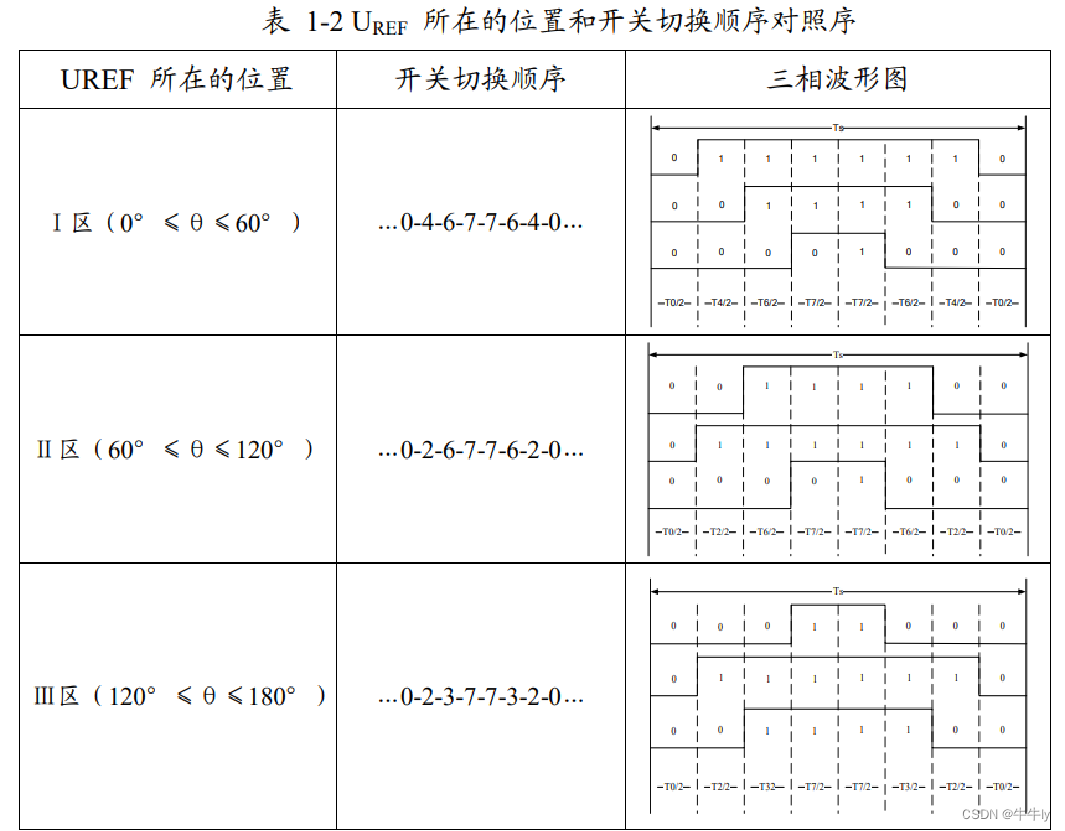
7段式各个扇区开关导通的顺序:
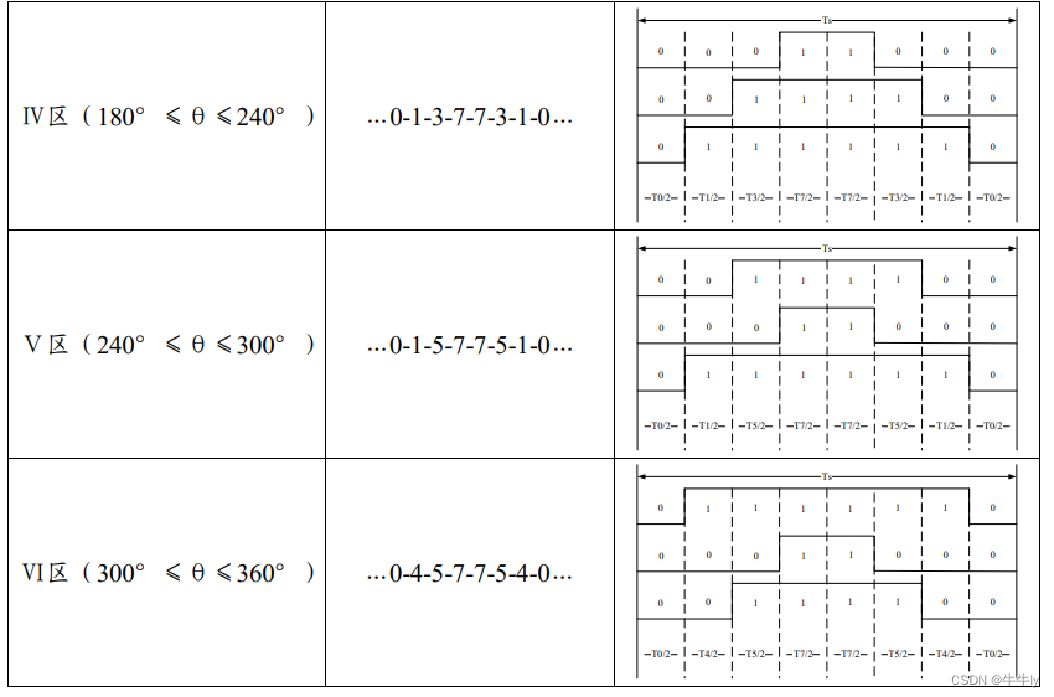
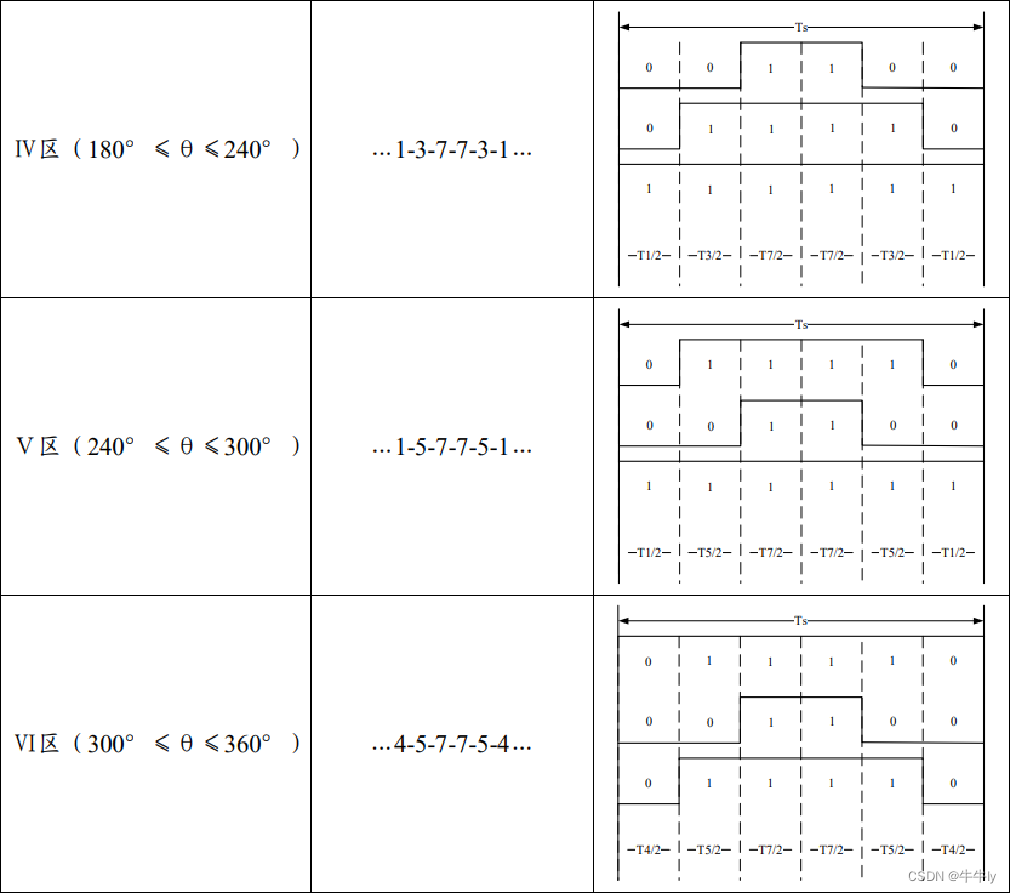
5段式各个扇区开关导通的顺序:
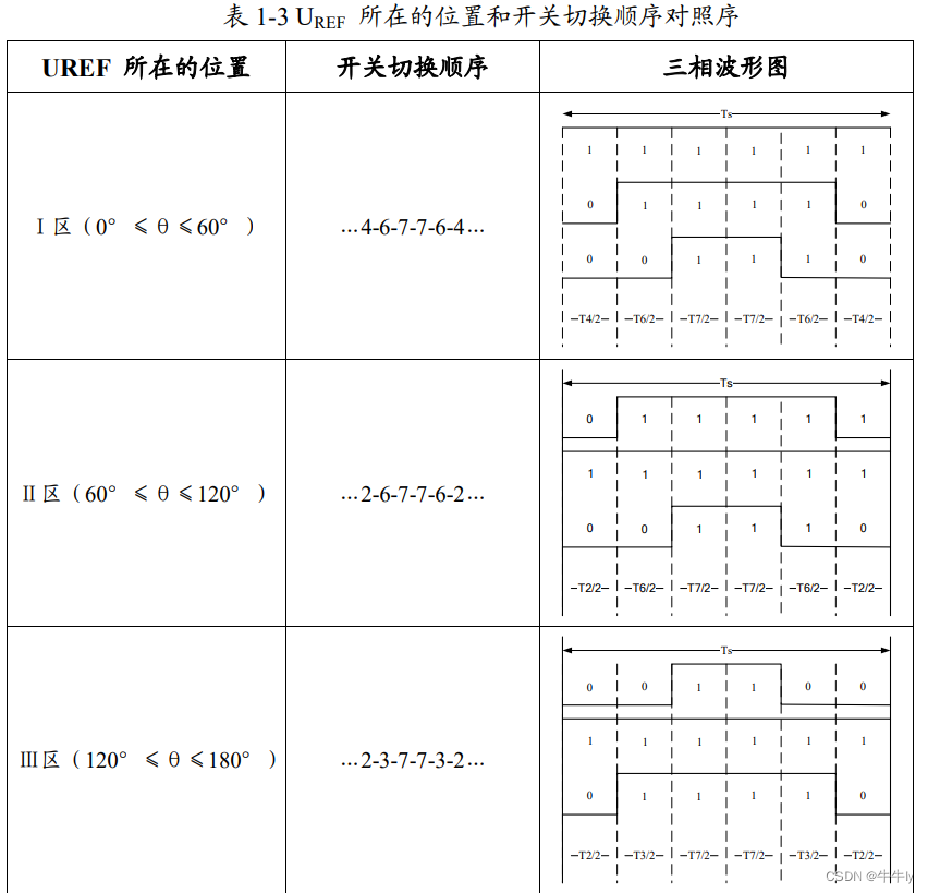
以7段式第一扇区为列:


1、每个状态切换的时候,都只有一个相发生了转变,从而降低MOS管的开关损耗;
2、合理插入两个零矢量,并且对零矢量在时间上进行了平均分配,以使产生的PWM对称,从而有效地降低了PWM的谐波分量。
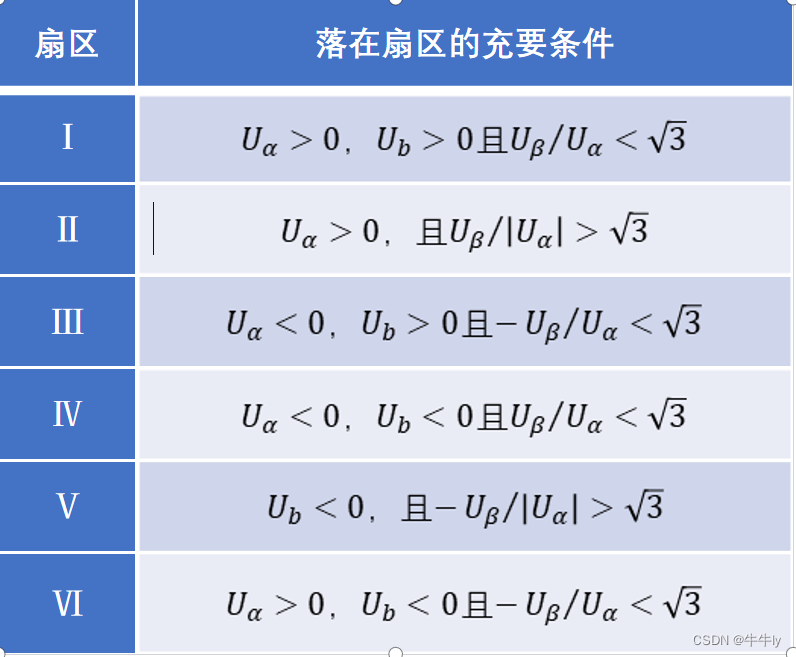
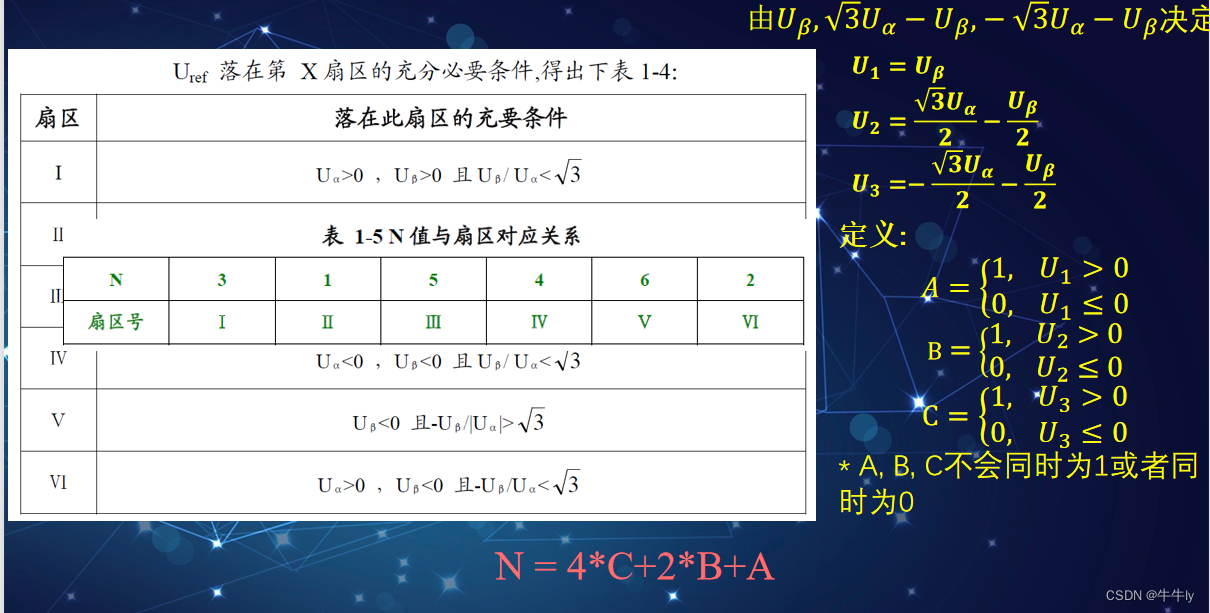
SVPWM扇区的判断方法1:
以第一扇区为列:

接着可以推出各个扇区的判断。
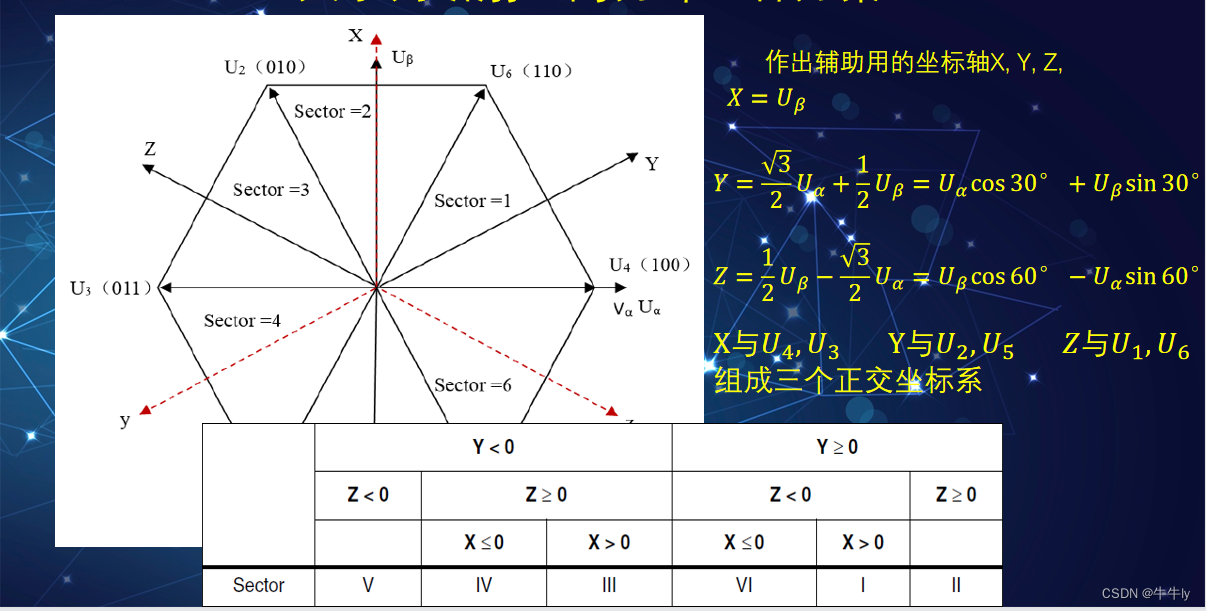
扇区判断方法2:


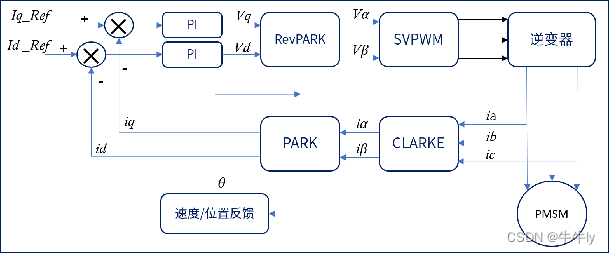
4.FOC整个框图总结
上面的FOC核心步骤按如下来讲的:
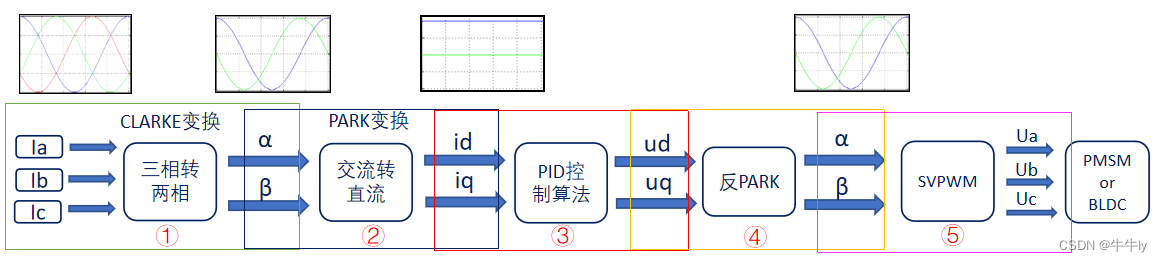
只是讲FOC的原理与推导并没有讲怎么实现。因为ST有对应的电机库可以学习。

