
- 1Linux中实时查看log日志命令_tail -f -n3 xx.log
- 2Git基本操作(9)- git 分支_gitlab 隐藏分支
- 3Mysql优化之Explain详解、索引最佳实践_mysql explain
- 4【毕业设计】基于微信小程序的社区服务系统小程序_新冠疫情管理系统毕业设计
- 5大数据管理平台(数据中台)方案及重难点技术分析
- 6基于java+SpringBoot+Vue的网吧管理系统设计与实现_网吧运营管理系统
- 7python下载numpy库_python怎么下载numpy
- 8YOLOv10训练教程—用YOLOv10训练自己的数据集
- 9IDEA使用Maven搭建spark开发环境(scala)_idea scala spark maven
- 10自然语言处理工具包:NLTKspaCy_spacy nltk
图的应用【最短路径】 —— Floyd 算法_floyd算法求最短路径
赞
踩
图的应用【最短路径】 —— Floyd 算法
Dijkstra算法用于求从源点到其他各个节点的最短路径。
如果求解任意两个节点之间的最短路径,则需要以每个节点为源点,重复调用n次Dijkstra算法。
其实完全没必要这么麻烦,Floyd算法可用于求解任意两个节点间的最短路径。Floyd算法又被称为插点法,其算法核心是在节点i 与节点j 之间插入节点k ,看看是否可以缩短节点i 与节点j之间的距离(松弛操作)。
【算法步骤】
① 数据结构。设置地图的带权邻接矩阵为G .Edge[][],即如果从节点i 到节点j 有边,则G .Edge[i ][j ]=<i ,j >的权值,否则G.Edge[i ][j ]=∞(无穷大);采用两个辅助数组:最短距离数组dist[i ][j ],记录从节点i 到节点j 的最短路径长度;前驱数组p [i][j ],记录从节点i 到节点j 的最短路径上节点j 的前驱。
② 初始化。初始化dist[i ][j ]=G .Edge[i ][j ],如果从节点i 到节点j 有边相连,则初始化p [i ][j ]=i ,否则p [i ][j]=-1。
③ 插点。其实就是在节点i 、j 之间插入节点k ,看是否可以缩短节点i 、j 之间的距离(松弛操作)。如果dist[i ][j ]>dist[i][k ]+dist[k ][j ],则dist[i ][j ]=dist[i ][k ]+dist[k ][j ],记录节点j 的前驱p [i ][j ]=p [k ][j ]。
【完美图解】
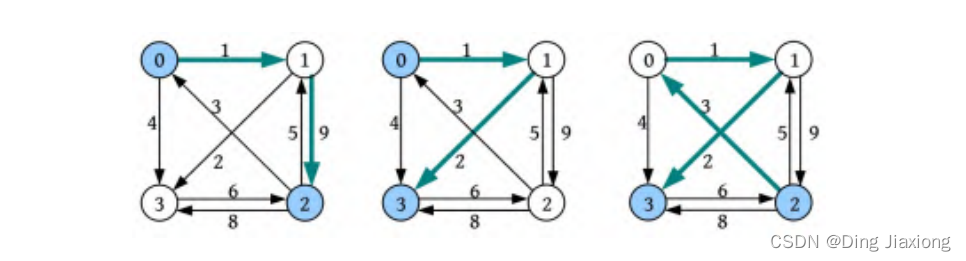
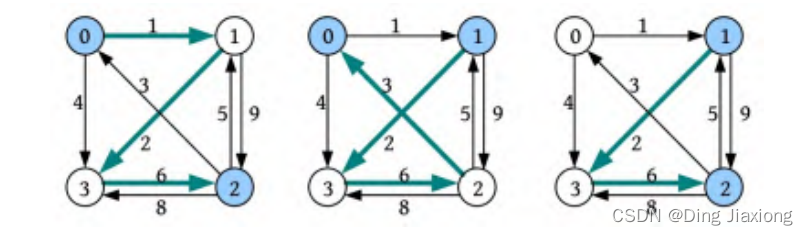
有一个景点地图,如下图所示,
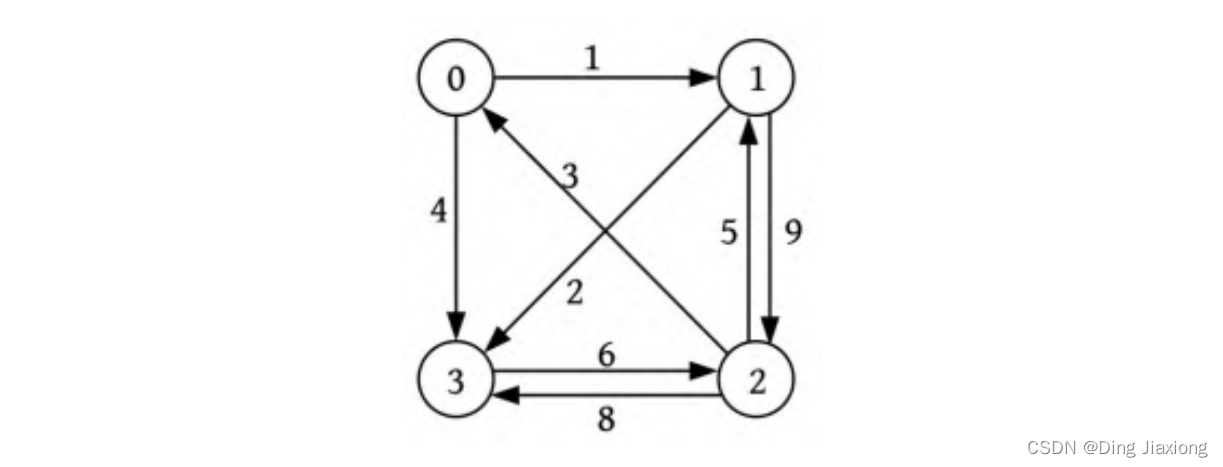
假设从节点0出发,求各个节点之间的最短路径。
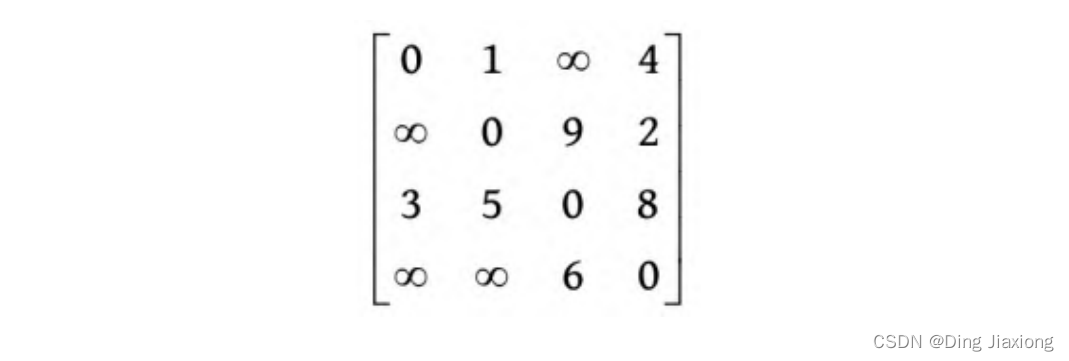
1 数据结构。地图采用邻接矩阵存储,如果从节点i 到节点j有边,则G .Edge[i ][j ]=<i , j >的权值;当i =j 时,G .Edge[i ][i ]=0,否则G .Edge[i ][j ]=∞(无穷大)。
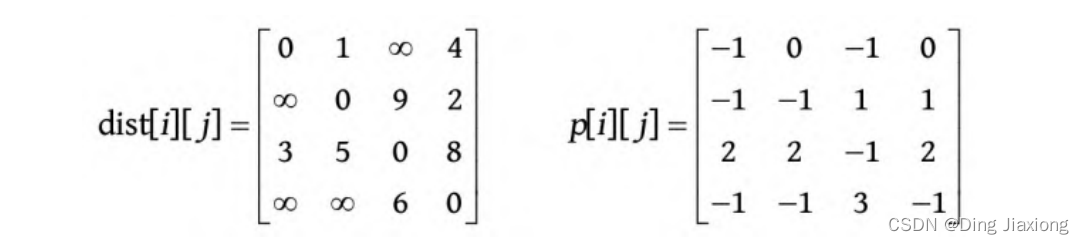
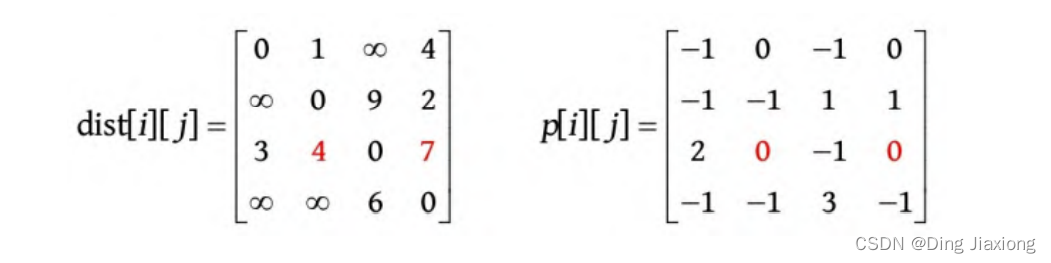
2 初始化。初始化最短距离数组dist[i ][j ]=G .Edge[i ][j],如果从节点i 到节点j 有边相连,则初始化前驱数组p [i ][j ]=i,否则p [i ][j ]=-1。初始化后的dist[][]和p [][]如下图所示。
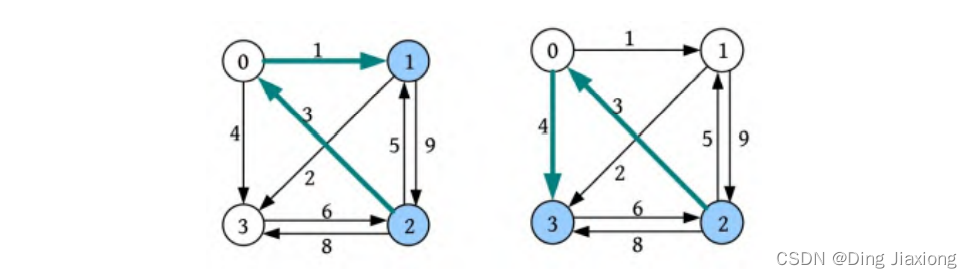
3 插点(k =0)。其实就是“借点、借东风”,考查所有节点是否可以借助节点0更新最短距离。如果dist[i ][j ]>dist[i ][0]+dist[0][j ],则dist[i ][j ]=dist[i ][0]+dist[0][j ],记录节点j 的前驱为p [i ][j ]=p [0][j ]。谁可以借节点0呢?看节点0的入边2-0,也就是说节点2可以借节点0,更新2到其他节点的最短距离(在程序中需要穷举所有节点是否可以借助节点0)。
- dist[2][1]:dist[2][1]=5>dist[2][0]+dist[0][1]=4,更新dist[2][1]=4,p [2][1]=0。在节点2、1之间插入节点0。
- dist[2][3]:dist[2][3]=8>dist[2][0]+dist[0][3]=7,更新dist[2][3]=7,p [2][3]=0。在节点2、3之间插入节点0。
以上两个最短距离的更新如下图所示。
更新后的最短距离数组和前驱数组如下图所示。
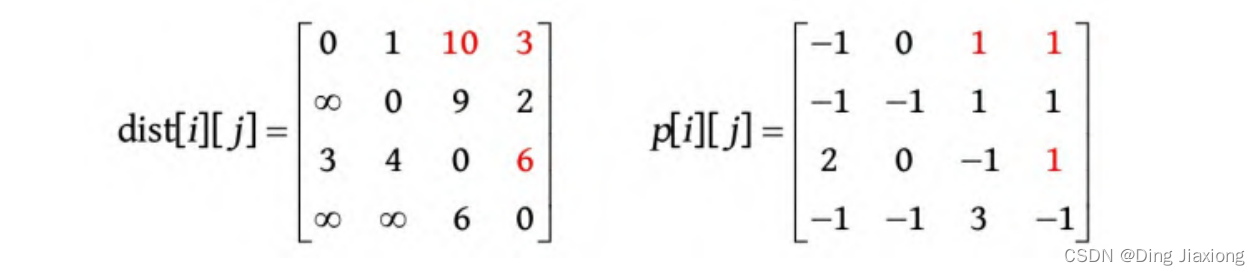
4 插点(k =1)。考查所有节点是否可以借助节点1更新最短距离。看节点1的入边,节点0、2都可以借助节点1更新其到其他节点的最短距离。
- dist[0][2]:dist[0][2]=∞>dist[0][1]+dist[1][2]=10,更新dist[0][2]=10,p [0][2]=1。在节点0、2之间插入节点1。
- dist[0][3]:dist[0][3]=4>dist[0][1]+dist[1][3]=3,更新dist[0][3]=3,p [0][3]=1。在节点0、3之间插入节点1。
- dist[2][0]:dist[2][0]=3<dist[2][1]+dist[1][0]=∞,不更新。
- dist[2][3]:dist[2][3]=8>dist[2][1]+dist[1][3]=6,更新dist[0][2]=6,p [2][3]=1。在节点2、3之间插入节点1。
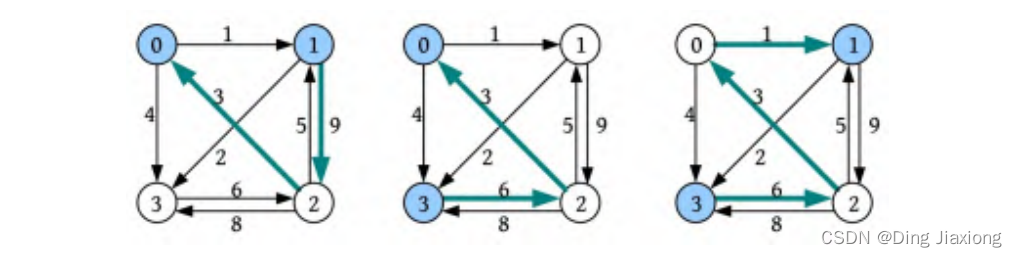
以上3个最短距离的更新如下图所示。
更新后的最短距离数组和前驱数组如下图所示。
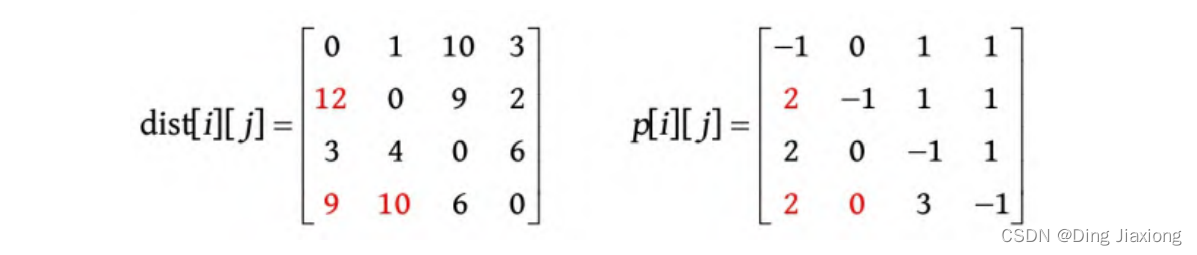
5 插点(k =2)。考查所有节点是否可以借助节点2更新最短距离。看节点2的入边,节点1、3都可以借节点2更新其到其他节点的最短距离。
- dist[1][0]:dist[1][0]=∞>dist[1][2]+dist[2][0]=12,更新dist[1][0]=12,p [1][0]=2。在节点1、0之间插入节点2。
- dist[1][3]:dist[1][3]=2<dist[1][2]+dist[2][3]=15,不更新。
- dist[3][0]:dist[3][0]=∞>dist[3][2]+dist[2][1]=9,更新dist[3][0]=9,p [3][0]=2。在节点3、0之间插入节点2。
- dist[3][1]:dist[3][1]=∞>dist[3][2]+dist[2][1]=10,更新dist[3][1]=10,p [3][1]=p[2][1]=0。在节点3、1之间插入节点2。
以上3个最短距离的更新如下图所示。
更新后的最短距离数组和前驱数组如下图所示。
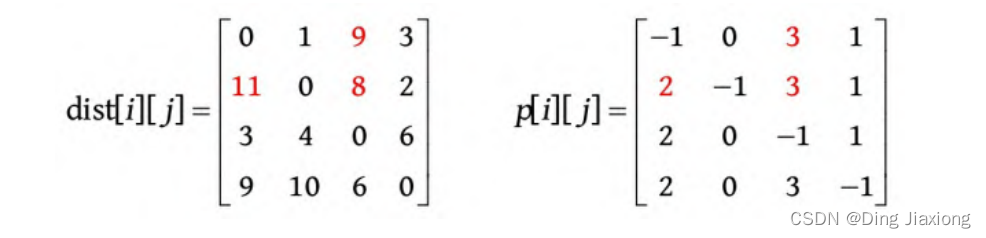
6 插点(k =3)。考查所有节点是否可以借助节点3更新最短距离。看节点3的入边,节点0、1、2都可以借助节点3更新其到其他节点的最短距离。
- dist[0][1]:dist[0][1]=1<dist[0][3]+dist[3][1]=13,不更新。
- dist[0][2]:dist[0][2]=10>dist[0][3]+dist[3][2]=9,更新dist[0][2]=9,p [0][2]=3。在节点0、2之间插入节点3点。
- dist[1][0]:dist[1][0]=12>dist[1][3]+dist[3][0]=11,更新dist[1][0]=11,p [1][0]=p [3][0]= 2。在节点1、0之间插入节点3。
- dist[1][2]:dist[1][2]=9>dist[1][3]+dist[3][2]=8,则更新dist[1][2]=8,p [1][2]=3。在节点1、2之间插入节点3。
- dist[2][0]:dist[2][0]=3<dist[2][3]+dist[3][0]=15,不更新。
- dist[2][1]:dist[2][1]=4<dist[2][3]+dist[3][1]=16,不更新。
以上3个最短距离的更新如下图所示。
更新后的最短距离数组和前驱数组如下图所示。
7 插点结束。dist[][]数组包含了各节点之间的最短距离,如果想找从节点i 到节点j 的最短路径,则可以根据前驱数组p [][]找到。例如,求从节点1到节点2的最短路径,首先读取p [1][2]=3,说明节点2的前驱为节点3,继续向前找,读取p [1][3]=1,说明节点3的前驱为节点1,得到从节点1到节点2的最短路径为1-3-2。求从节点1到节点0的最短路径,首先读取p [1][0]=2,说明节点0的前驱为节点2,继续向前找,读取p [1][2]=3,说明节点2的前驱为节点3,继续向前找,读取p [1][3]=1,得到从节点1到节点0的最短路径为1-3-2-0。
【算法实现】
void Floyd(AMGragh G){ //用Flody算法求有向图G 中各对节点i 与 j 之间的最短路径 int i , j , k; for(i = 0 ; i < G.vexnum ; i++){ //各对节点之间的初始距离及已知路径 for(j = 0 ; j < G.vexnum ; j ++){ dist[i][j] = G.Edge[i][j]; if(dist[i][j] < INF && i != j){ p[i][j] = i; //如果在节点i 和 节点j 之间有弧,则将节点j 的前驱置为i } else{ p[i][j] = -1; //如果在节点i 和 节点 j 之间无弧,则将节点j 的前驱置为-1 } } } for(k = 0 ; k < G.vexnum ; k ++){ for(i = 0 ; i < G.vexnum ; i++){ for(j = 0 ; j < G.vexnum ; j ++){ if(dist[i][k] + dist[k][j] < dist[i][j]){ //从节点i 经节点k 到节点j 的一条路径更短 dist[i][j] = dist[i][k] + dist[k][j]; //更新dist[i][j] p[i][j] = p[k][j]; //更改j 的前驱为k } } } } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
【算法分析】
时间复杂度:三层for循环,时间复杂度为O (n^3 )。
空间复杂度:采用最短距离数组dist[][]和前驱数组p[][],空间复杂度为O (n^2 )。
尽管Floyd算法的时间复杂度为O (n^3 ),但其代码简单,对于中等输入规模来说,仍然相当有效。如果用Dijkstra算法求解各个节点之间的最短路径,则需要以每个节点为源点都调用一次,共调用n 次,其总的时间复杂度也为O (n^3 )。
特别注意的是,Dijkstra算法无法处理带有负权边的图。如果有负权边,则可以采用Bellman-Ford算法或SPFA算法。

