
热门标签
热门文章
- 1Joplin Typora 粘贴图片 | 当使用Typora作为Joplin编辑器时,如何粘贴图片并上传到Joplin服务器,替换链接
- 22024年最全Redis配置项汇总(超级详细)_配置库及配置项列表示例,2024年抓住金三银四涨薪好时机_redis参数配置
- 3实验七:定时/计数器8253、8254_8253定时器计数器实验
- 4LORA技术学习 一_lora 空中波特率
- 5XXE外部实体引入漏洞原理及复现_xml外部实体注入漏洞怎么修复
- 6忆龙2009:详解SSH的工作流程_简述ssh协议在整个通信中,服务器端和客户端需要经历的五个阶段
- 7Hadoop实验——熟悉常用的HDFS操作_hdfs的基本操作实验报告
- 8Keil在线或使用调试器调试仿真教程_keil在线调试
- 9SQL Server 查询处理过程_sql server怎么把调试改成查询
- 10企业跨境文件传输的核心痛点,怎样保证稳定可靠的传输性能?
当前位置: article > 正文
HAL库—定时器Timer使用及PWM_hal 定时器
作者:我家自动化 | 2024-06-20 08:28:08
赞
踩
hal 定时器
与51单片机定时对比
51单片机的延时(软件定时):
//由stc软件生成的51延时代码 void Delay500ms() //@11.0592MHz { unsigned char i, j, k; _nop_(); i = 4; j = 129; k = 119; do { do { while (--k); } while (--j); } while (--i); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
缺点:不精确、占用CPU资源
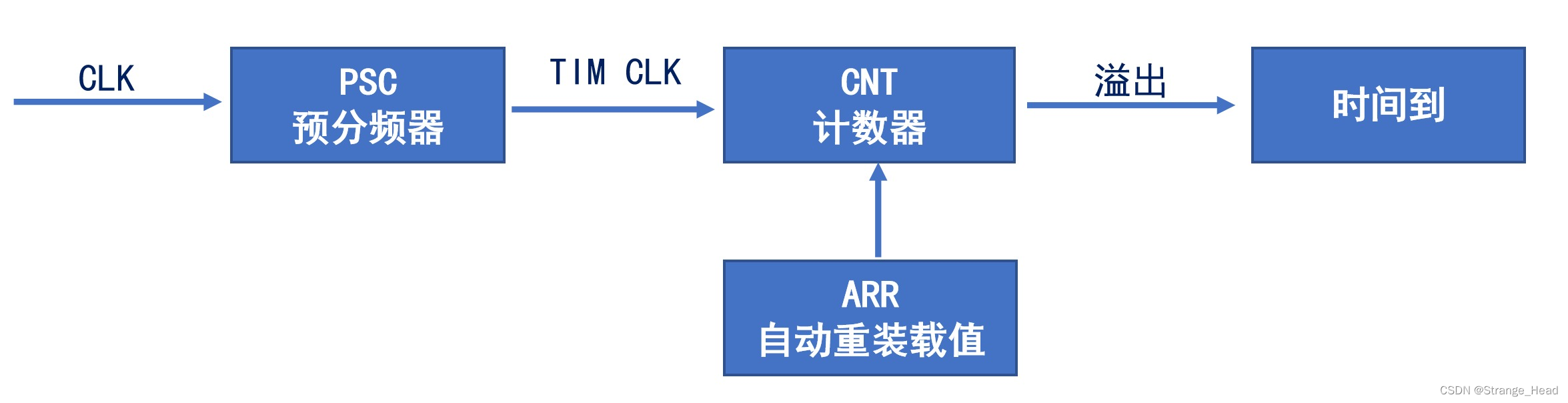
stm32定时器工作原理:
使用精准的时基,通过硬件的方式,实现定时功能。定时器核心就是计数器。
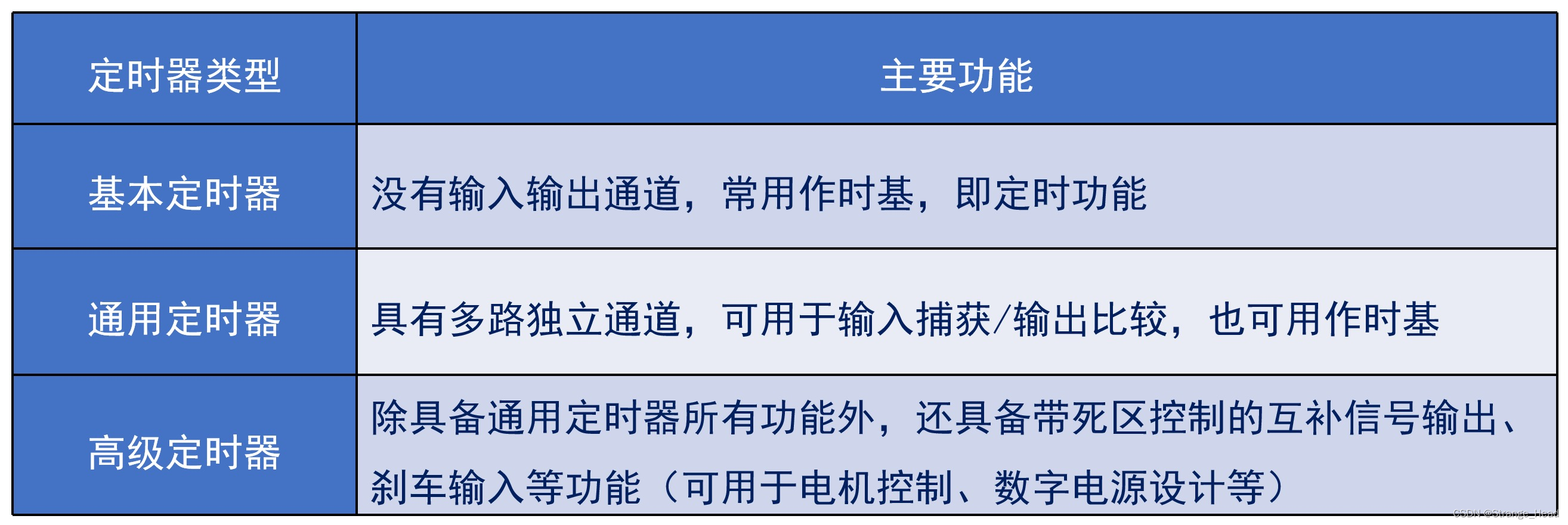
定时器分类:
- 基本定时器(TIM6~TIM7)
- 通用定时器(TIM2~TIM5)
- 高级定时器(TIM1和TIM8)
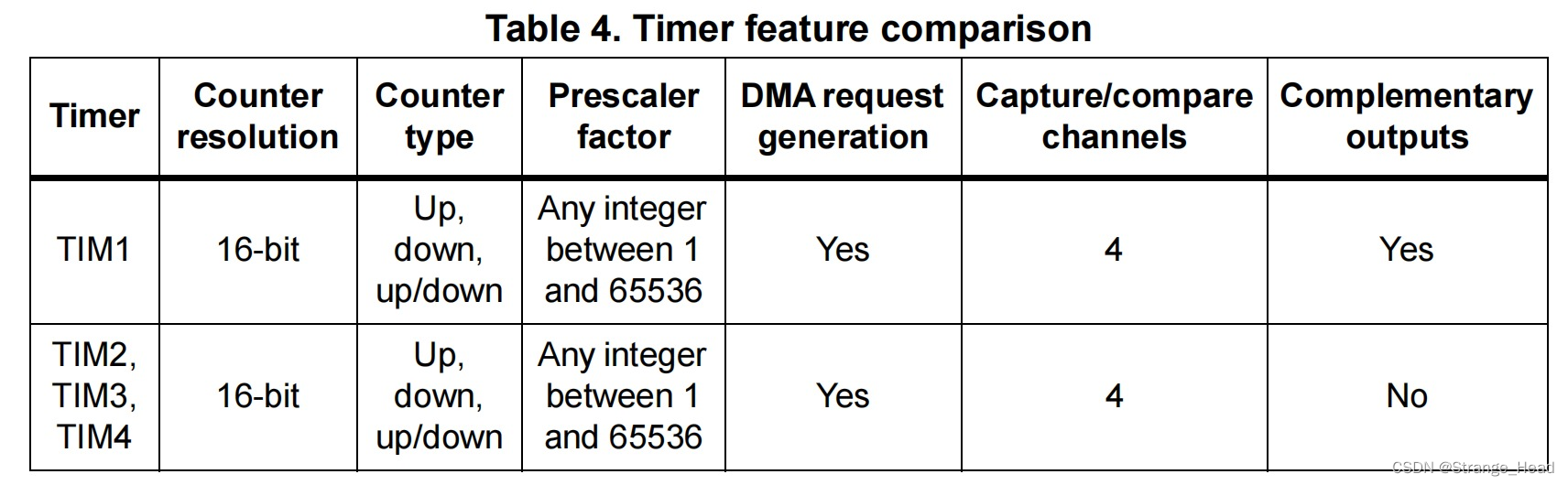
STM32F103C8T6定时器资源:
通用定时器介绍:
- 16 位向上、向下、向上/向下自动装载计数器(TIMx_CNT)。
- 16 位可编程(可以实时修改)预分频器(TIMx_PSC),计数器时钟频率的分频系数为 1~65535 之间的
任意数值。- 4 个独立通道(TIMx_CH1~4),这些通道可以用来作为:
A.输入捕获
B.输出比较
C.PWM 生成(边缘或中间对齐模式)
D.单脉冲模式输出- 可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用 1 个定时器控制另外一个定时器)
的同步电路。- 如下事件发生时产生中断/DMA:
A.更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
B.触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
C.输入捕获
D.输出比较
E.支持针对定位的增量(正交)编码器和霍尔传感器电路
F.触发输入作为外部时钟或者按周期的电流管理
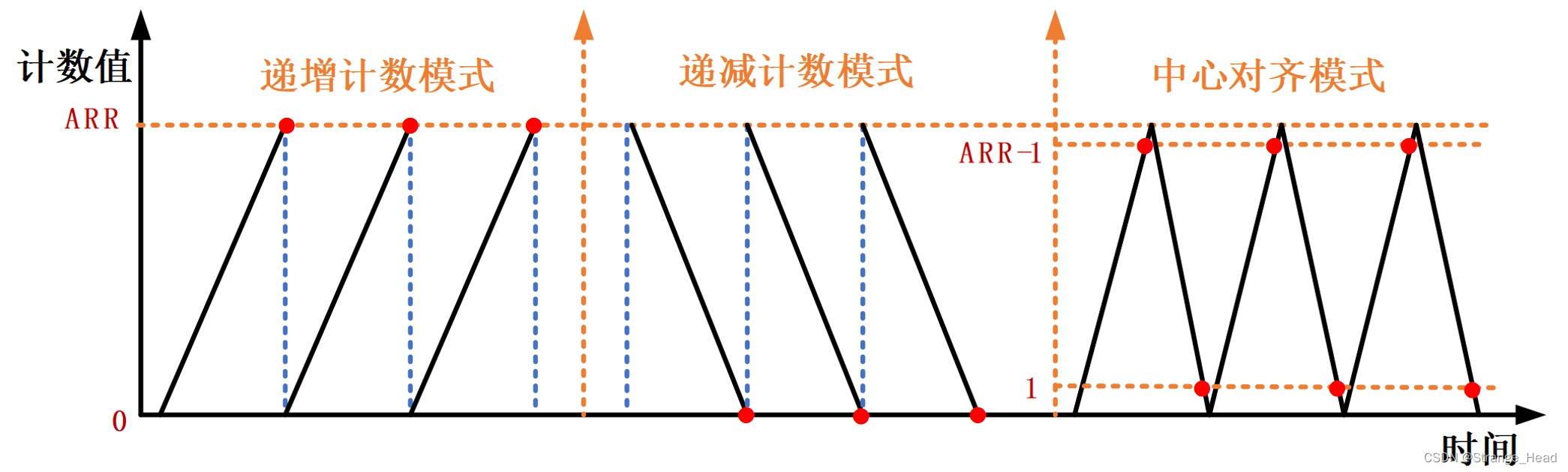
定时器计数模式:

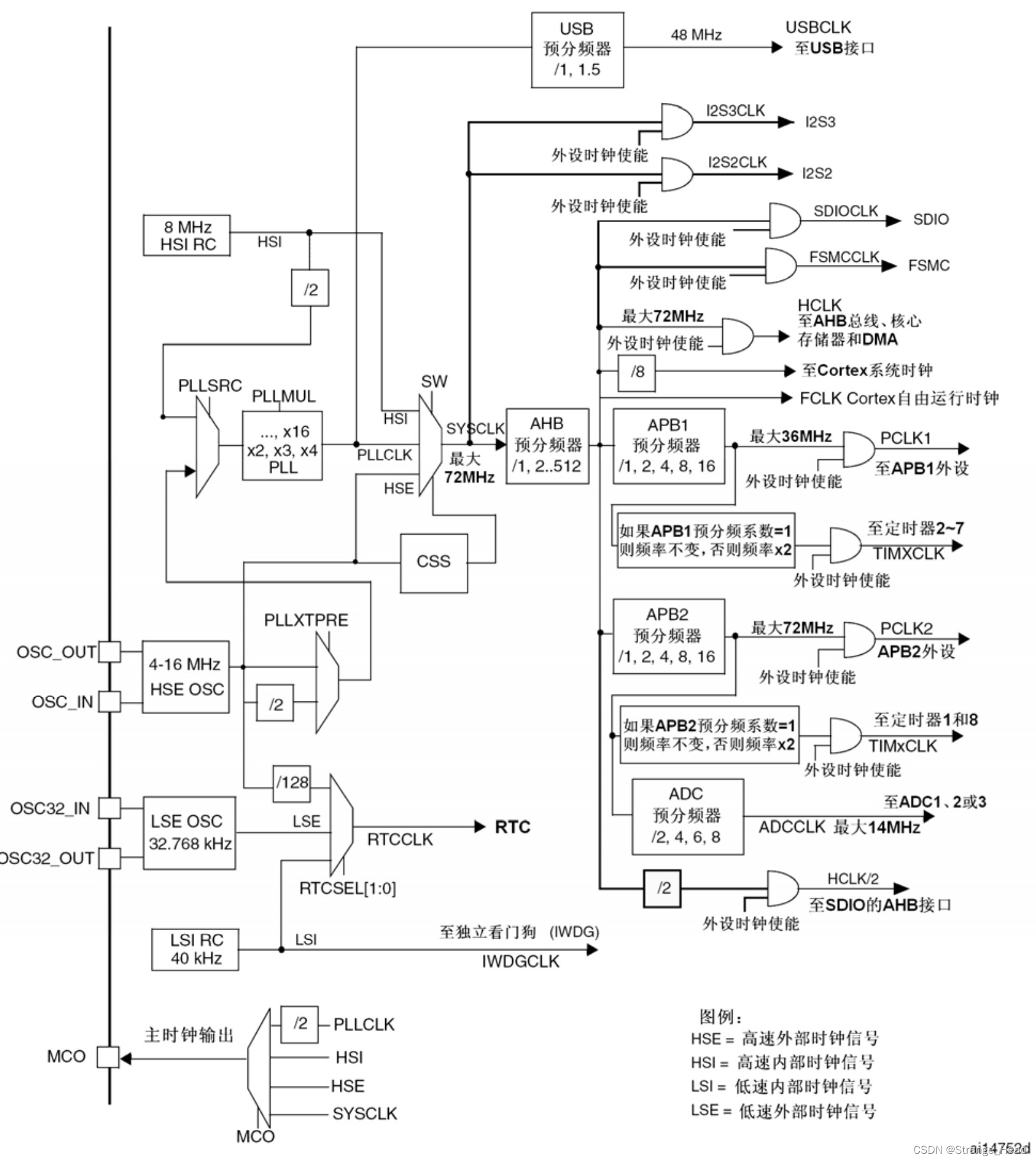
定时器时钟源:
定时器溢出时间计算公式:
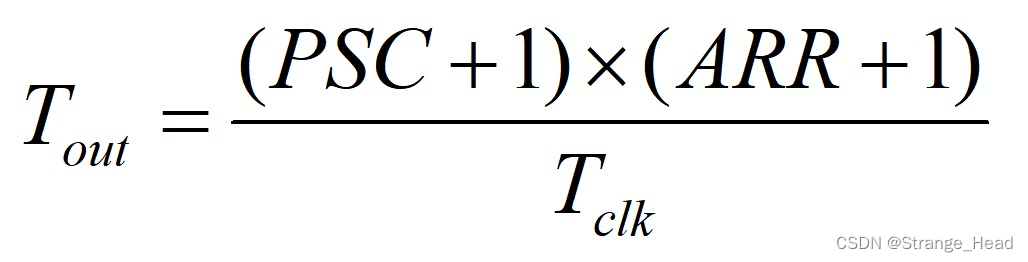
(PSC为分频系数)(ARR为重装载值)(Tout为输出时间(需要))(Tclk为时钟频率)
已知:Tclk = 72MHZ
例如,要定时1000ms,则:PSC=7199,ARR=9999,Tclk=72M
#############################################################################
PWM资源
- 高级定时器(TIM1):7路
- 通用定时器(TIM2~TIM4):各4路
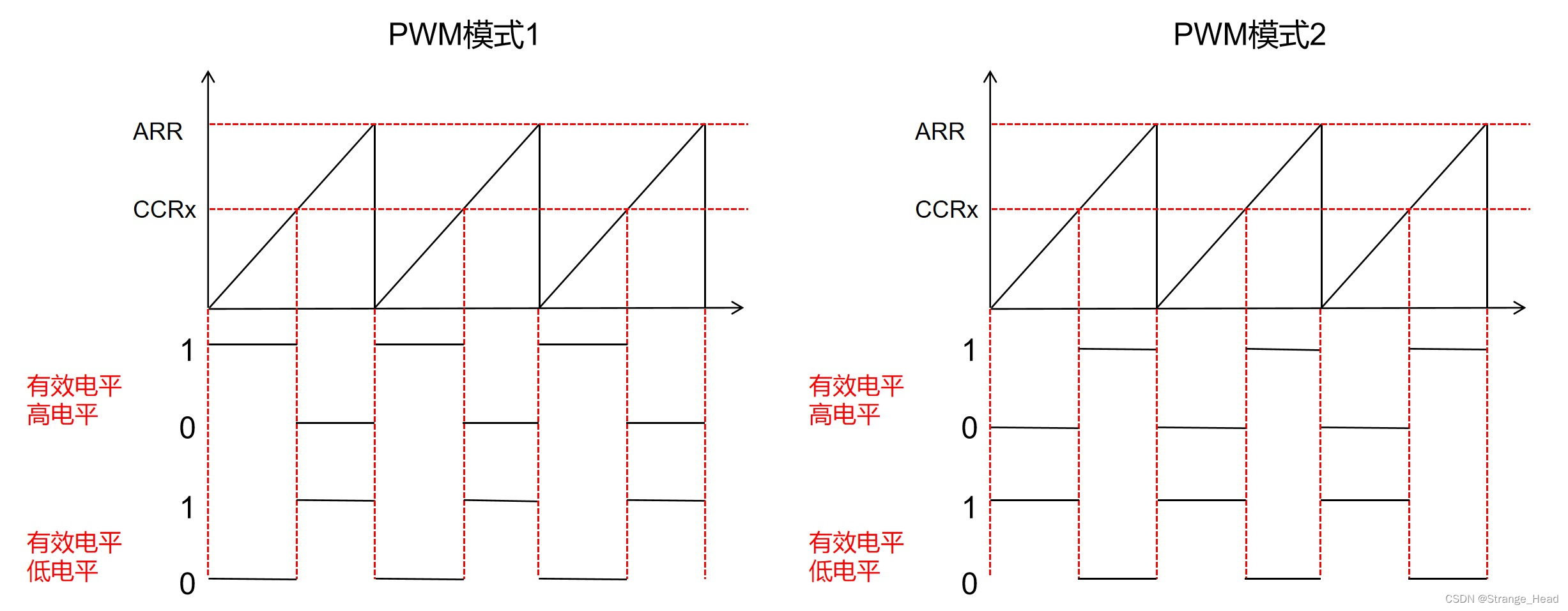
PWM输出模式:
-
PWM模式1:在向上计数时,一旦 CNT < CCRx 时输出为有效电平,否则为无效电平; 在向
下计数时,一旦 CNT > CCRx 时输出为无效电平,否则为有效电平。 -
PWM模式2:在向上计数时,一旦 CNT < CCRx 时输出为无效电平,否则为有效电平; 在向
下计数时,一旦 CNT > CCRx 时输出为有效电平,否则为无效电平。
PWM占空比:由TIMx_CCRx寄存器决定。
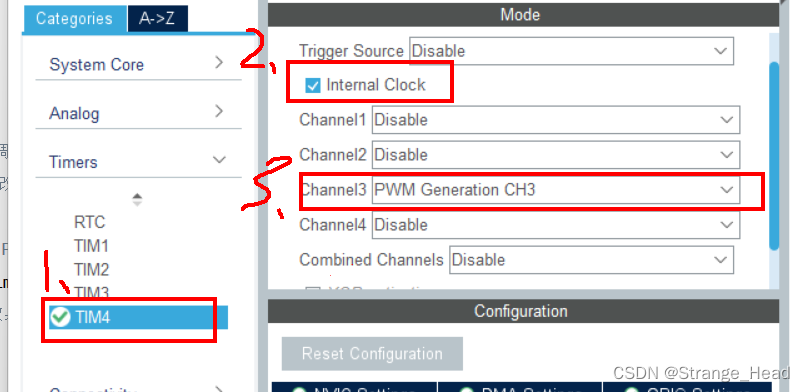
PWM配置(Cube Max)
//启动tim2
HAL_TIM_Base_Start_IT(&htim2);
//配置占空比
//参数:句柄,通道,值
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal);
- 1
- 2
- 3
- 4
- 5
PWM呼吸灯实验
int main() { // 定义变量 uint16_t pwmVal=0; //调整PWM占空比 uint8_t flag=1; //设置改变方向。1:占空比越来越大;0:占空比越来越小 // 使能 Timer4 第3通道 PWM 输出 HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3); // while循环实现呼吸灯效果 while (1) { HAL_Delay(1); if (flag) pwmVal++; else pwmVal--; if (pwmVal > 500) flag = 0; if (pwmVal == 0) flag = 1; //修改比较值,修改占空比 __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, pwmVal); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
结束
如果有问题,欢迎提出,共同进步。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/739205
推荐阅读
相关标签

