
热门标签
热门文章
- 1Window下mysql安装以及配置_window mysql -install
- 2云计算第1阶段_Linxu基础知识_day03,非科班生金九银十求职经历
- 3Kali Linux虚拟机_kail虚拟机
- 4AI工具分享第二期:11款国内外AI绘画提示词工具整理_ai提示词工具库
- 5QT QByteArray 的用法_qbytearray 存文件
- 6地址解析协议ARP工作过程_(6)在pc0再次查询arp表,此时,pc0的arp表有一条记录。 【问题2】请详细阐述pc0获得
- 7Python GUI编程:关于 tkinter 怎么才能写出更好看的界面_tkinter设计漂亮界面
- 8人脸识别 Open CV
- 9MarkDown语法_语雀添加行内代码
- 10UE5 C++ UGameInstance 功能、作用及应用_ue5 gameinstance
当前位置: article > 正文
点云传统算法
作者:我家自动化 | 2024-06-23 21:05:30
赞
踩
点云传统算法
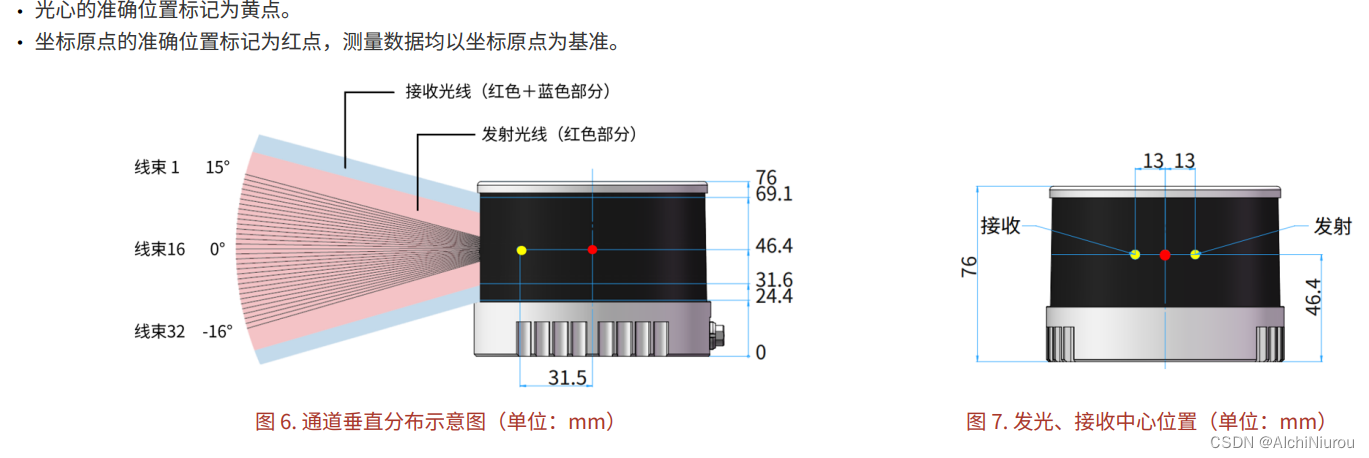
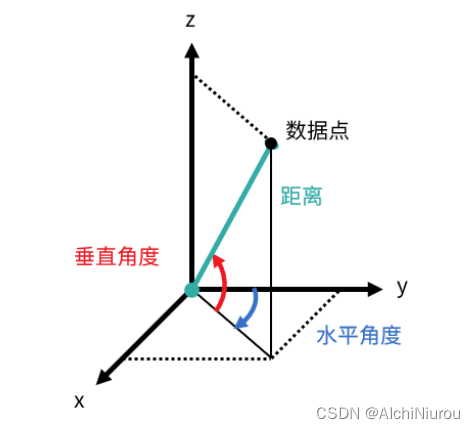
根據激光機械結構原理, 球座標系下,rangeimage 下
原始點的座標 是球座標系(theta1,theta2,dis)–》 x,y,z
各通道在水平方向上存在固定角度偏差,详见该台雷达的角度修正文件(通常在发货时提供)。
1 滤波,过滤噪点,下采样
统计滤波: voxel,
半径搜索:
# 基于体素网格化的滤波器
voxel_down_pcd = cloud.voxel_down_sample(voxel_size=0.5)
# 基于半径搜索的滤波器
cl, ind = cloud.remove_statistical_outlier(nb_neighbors=20, std_ratio=2.0)
cloud_stat = cloud.select_by_index(ind)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
配准
NDP
CDP: coherent point Drift
SVD
ICP

标定
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/750710
推荐阅读
相关标签

