
双翌视觉系统配合机械手大视野定位案例(单目标带角度抓取)_视觉引导协作机器人定位案例
赞
踩
一、定位原理概述
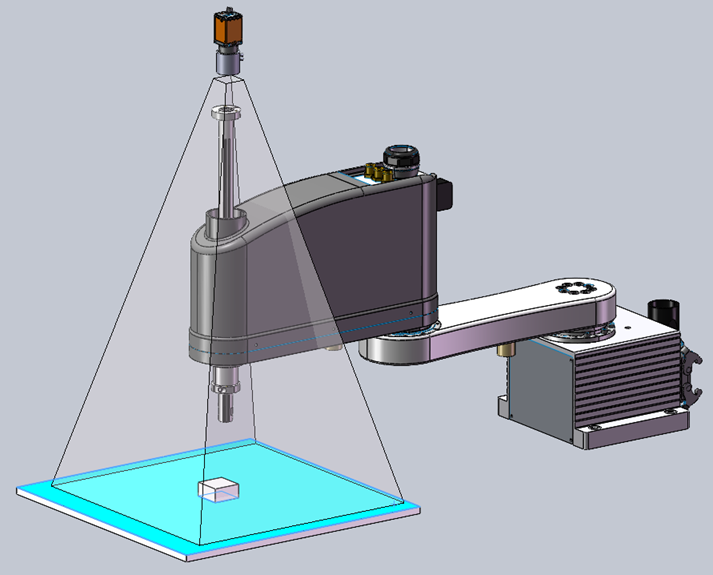
1.系统构架
视觉定位系统采用正向打光方式,光源在机械手上方,CCD从上往下拍摄,进行图像分析定位。相机将计算出的像素坐标转换为机械手的物理坐标,视觉软件与机械手进行网口通讯,将视野内物料的物理坐标发送给机械手,机械手抓取物料放在指定工位。

2.相机标定概述
系统采用宫格标定确定像素坐标和物理坐标一一对应关系,同时利用3点或者多点旋转标定求出旋转中心

系统采用宫格标定,自定义行列数和间距及旋转角度,通过机械手发送的当前机械坐标,视觉软件自动计算出宫格机械坐标,视觉软件与机械手进行网口通讯,机械手吸取物料到达指定的机械坐标,相机拍摄物料计算出像素坐标和机械坐标的关系。

二、调试流程
1.设置软件配置——基础参数
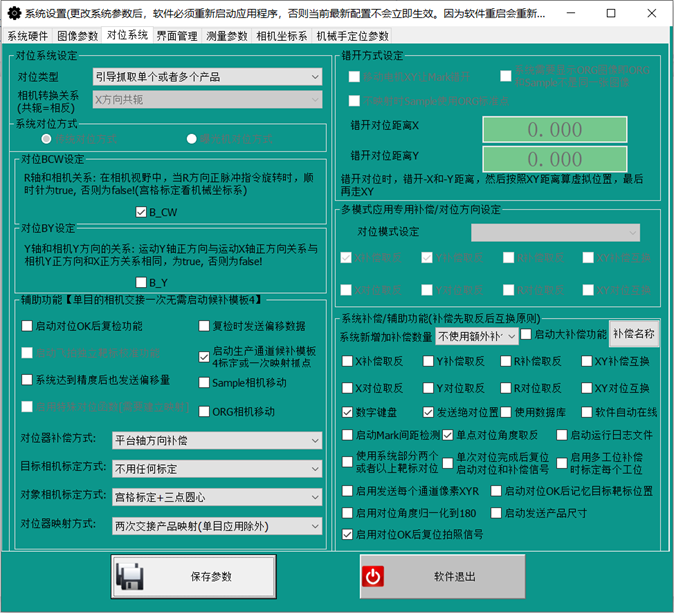
2.软件配置——基础参数

3.配置参数——根据视野计算宫格的行数和列数

4.配置参数——根据视野计算宫格的行数和列数

5.配置参数--BCW设定

6.配置参数--对位的BCW设定

7.配置参数--对位的BY设定
以相机的方向观察平台X、Y运动(相机的自旋转角度不需要考虑),相机能同时观察X、Y方向的运动情况(标准模型)。运动Y轴正方向在运动X轴正方向的顺时针90度处,为true,否则为false!

8.配置参数-根据视野计算宫格的行数和列数

9.通讯连接测试-确认通讯设置
点击通信设置-端口参数,看通讯状态是否连接上。

通讯不上可能存在一下几点问题:
a、注意服务器端口、起始码结束码是否一样。
b、注意用户端IP是否一样。
c、防火墙是否没有关闭。
10.通讯连接测试-通讯协议测试
机器人给PC发命令,看是否能接收到对应的命令。
接收不到可能是通讯没连上或者没加起始码还有就是命令协议写错了。接收到的数据不对或者显示数据错误可能是用户IP地址不对或者数据位不对。

11.通讯协议测试
PC给机器人发命令,看是否能接收到对应的命令。
接收不到可能是通讯没连上或者没加起始码还有就是命令协议写错了。

12.系统标定(机械手根据宫格坐标走位置吸放产品,相机对产品进行每个位置拍照)
标定方法:机器人抓取一个标定板,在视野中间位置,对标定板进行模版学习然后机器人发命令开始标定。

说明:只要相机拍照位置有改变必须要进行标定
13.标定方式
a.取放的方式标定:抓取产品或者标定块在视野里进行取放标定。
此方法比较适合用于放料平台有真空吸附的,防止取放的时候产品有移动。
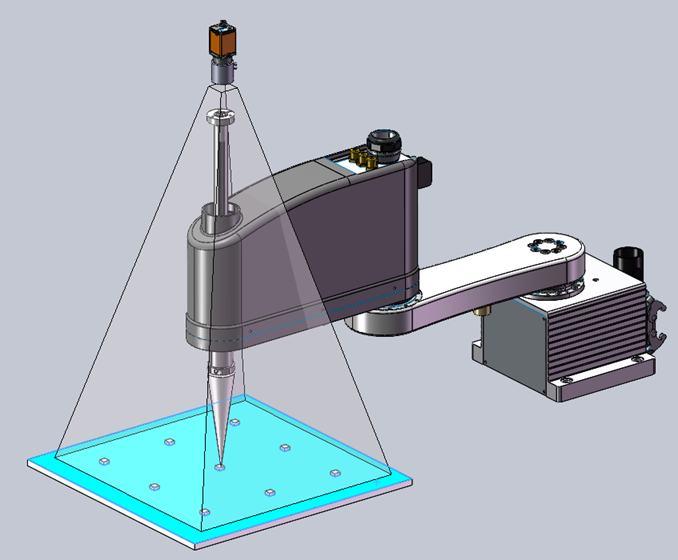
b.探针标定插点方式标定:放置一个标定板(3*3Mark点标定板)移动机器人去戳点然后相机记录位置。
此方法标定精度高,人工操作麻烦,需要移动机器人人眼观察探针是否插到标定板Mark点中心,然后在视觉里输入坐标位置。
c.伸棒棒标定方式:因为相机上照机械手会挡住相机的视野,所以用一个较长的标定板锁在机械手或者吸在机械手上。标定板上会有一个Mark点将Mark伸到视野中心开始标定。
注意标定板到镜头的工作距离尽量于镜头到产品的工作距离一样!
此方法适用于结构空间较大不会挡住机器人运动时使用。这种标定方法的精度没有探针的标定方法精度高。

d.吸着不放的标定方式:就是吸着产品或者标定板在相机视野内移动拍照标定。此方法比较适用于相机视野不会被机械手挡住的情况。
标定时注意产品到镜头的工作距离是否一样。

14.示教生产位置
机器人抓取产品放到视野中心位置然后离开,相机拍照修改记录当前位置保存为基准点。

注:示教时注意机器人的旋转角度要与标定时的旋转角度一致!
15.自动运行测试

三、软件操作介绍
1.软件主页
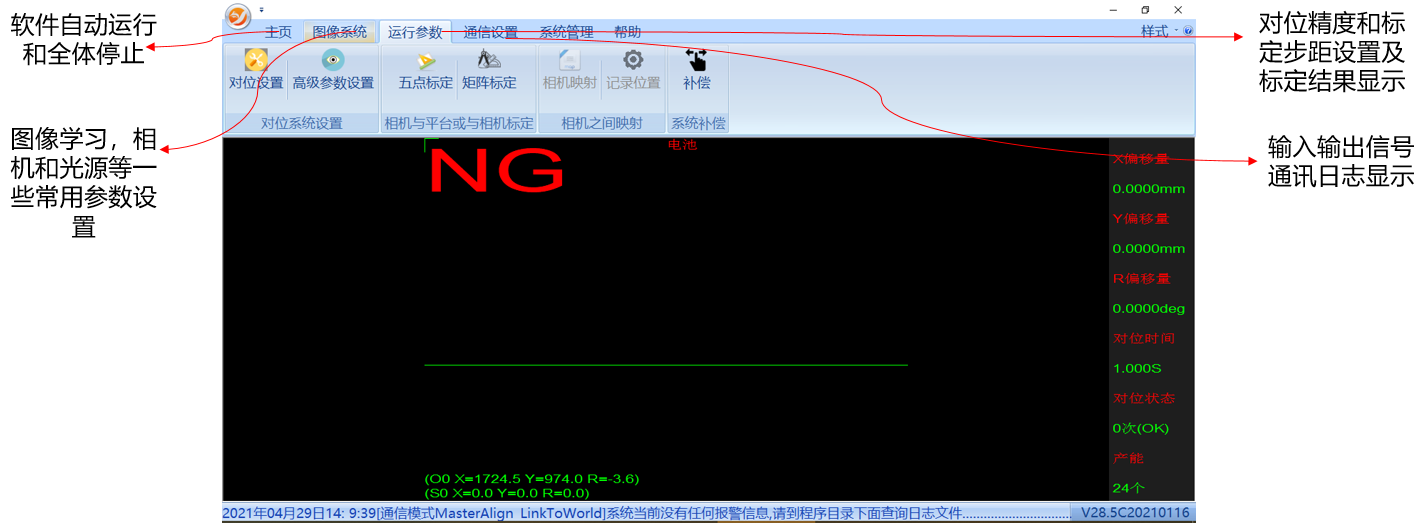
2.图像学习


3.系统补偿
根据实际应用需求,机械手吸盘抓取物料中心位置偏差进行补偿。补偿的方向参照机械手的的坐标系方向。如图方向所示。



