
- 1Unity3D 游戏数据本地化存储与管理详解
- 2生成对抗网络(GAN)_对抗网络 共享特征
- 3python+jieba+wordcloud实现超酷的词云_jieba分词后如何使用jupyter输出
- 4go + uniapp 通过 微信 code 获取 appid 等信息 无废话_uniapp获取微信code
- 5go语言有没有简单的流程引擎_go 流程引擎
- 6Mysql---C#在cmd中使用mysqldump导出sql文件
- 7论文阅读【时间序列分析1】Reconstructing Nonlinear Dynamical Systems from Multi-Modal Time Series_多模态时间序列
- 8yolov5调试common.py出现importerror: cannot import name ‘tryexcept‘ from ‘utils‘_cannot import name 'tryexcept' from 'utils
- 9Android:漫画APP开发笔记之ListView中图片按屏幕宽度缩放_android listview可缩放
- 10基于 Nginx Ingress + 云效 AppStack 实现灰度发布
对于Colmap的三个文件讲解_colmap images输出文件的解释
赞
踩
当使用Colmap进行稀疏重建时,会生成一下三个文件。

依次对每个文件进行介绍:
1、points3D.txt
- # 3D point list with one line of data per point:
- # POINT3D_ID, X, Y, Z, R, G, B, ERROR, TRACK[] as (IMAGE_ID, POINT2D_IDX)
- # Number of points: 750, mean track length: 2.9506666666666668
- 1 2.4828681030642312 -5.0682527653218825 29.777528391988987 99 117 90 0.28006835886839493 1 85 3 58 2 64
- 393 -5.1319171487367123 2.8186788299391412 15.199595828661161 162 158 157 0.82049755044180017 1 2109 3 4269 2 4818
POINT3D_ID:三维点的id (二维点可以根据此id找到图片对应的三维点)
X, Y, Z:三维点坐标
R, G, B:三维点颜色信息
ERROR:投影误差(基于像素)
TRACK[] as (IMAGE_ID, POINT2D_IDX):对应images.txt里的图像id,以及每张图你对应特征点的id。比如说上面:1 85 3 58 2 64,意思是图片ID为1的对应images.txt里面的第85个点,ID为3的对应images.txt里面的第58个点,ID为2的对应images.txt里面的第64个点,这三个点是对应三张图的特征点,这三个点都映射到这个三维点。
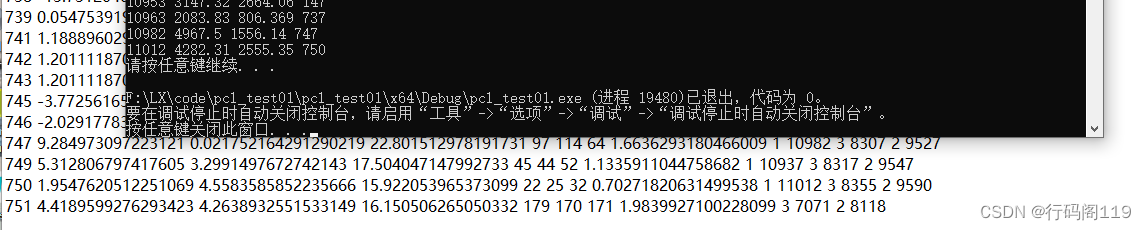
看上图黑色是二维图片的数据,通过代码遍历出来,,第一列是对应点的ID ,第二列,第三列对应的是图像二维坐标,第四列对应的是三维点的ID。白色部分是points3D.txt里的数据,通过对比,查看白色倒数第二行数据,发现750对应的图片ID为1的二维点ID为11012,刚好对应上,那么此时二维点(4282.31 2555.35)对应的三维点是(4.4189599276293423 4.2638932551533149 16.150506265050332 )。
2、images.txt
# Image list with two lines of data per image:
# IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME
# POINTS2D[] as (X, Y, POINT3D_ID)IMAGE_ID:图像ID
QW, QX, QY, QZ:四元素
TX, TY, TZ:平移向量
CAMERA_ID:相机的ID
NAME:图片的名字
四元素转换为旋转矩阵课参考:(3条消息) Cesium中的相机—四元素_云上飞47636962的博客-CSDN博客
3.cameras.txt
# Camera list with one line of data per camera:
# CAMERA_ID, MODEL, WIDTH, HEIGHT, PARAMS[]
# Number of cameras: 1
1 PINHOLE 5472 3078 3606.6260092760231 3554.1046035895465 2736 1539CAMERA_ID:相机ID
MODEL:相机名字
WIDTH:图像宽度
HEIGHT:图像高度
PARAMS[]:对应相机内参依次:(fx=fy),cx,cy;

