
- 1CPU上安装ollama和部署开源Llama2-chinese模型_ollama cpu
- 2乡村智慧化:数字乡村助力农村可持续发展
- 3智慧驿站:智慧公厕的升级版,助力城市公共卫生设施的全面变革
- 4数字中国发展报告(2022年)
- 5基于Python爬虫智联招聘山西省招聘信息可视化和推荐查询系统设计与实现(Django框架) 研究背景与意义、国内外研究现状
- 6CorelDRAW Graphics Suite2024重磅发布,快来看看有哪些新功能吧!_coreldraw 插件大师系统工具cdr一键记账,自动识别文件生成效果图 账单#广告人 #插
- 7自然语言处理技术:NLP句法解析树与可视化方法_文本处理中的句法树是用来做什么的
- 8Kmeans和谱聚类算法(python实现sklearn)_kmeans python sklearn
- 9最详尽系统服务和木马默认端口表_ipx-214
- 10《Agents: An Open-source Framework for Autonomous Language Agents》一个自主语言智能体的开源框架
基于stm32单片机智能导盲拐杖源程序Proteus仿真设计_基于stm32技术的导盲手杖
赞
踩
功能介绍:
采用stm32单片机作为主控CPU,采用srf05超声波模块测量障碍物距离,LCD1602显示屏显示当前的障碍物距离,通过传感器测量障碍物的距离的远近来进行相关报警,距离越近,蜂鸣器报警节奏越急促,来给盲人提示前面有障碍物,程序采用keil5编写,并且有中文注释,新手容易看懂,仿真采用Proteus,全套仿真资料齐全:下面是视频讲解:
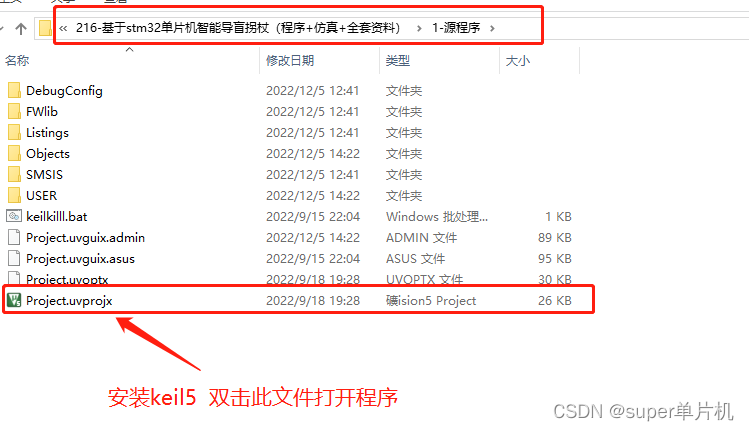
216-基于stm32单片机智能导盲拐杖(程序+Proteus仿真+全套资料)
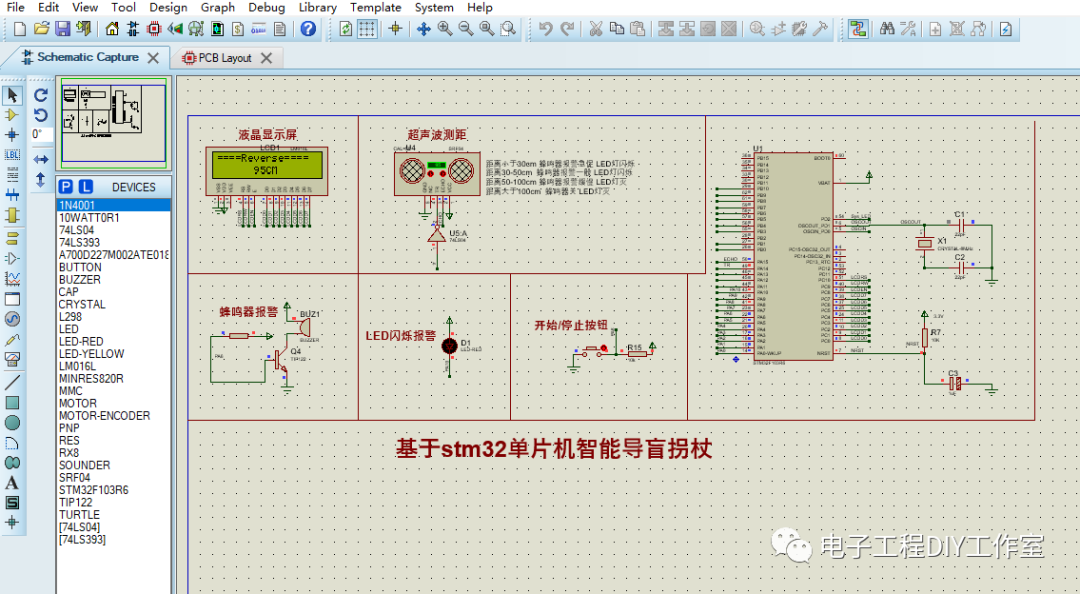
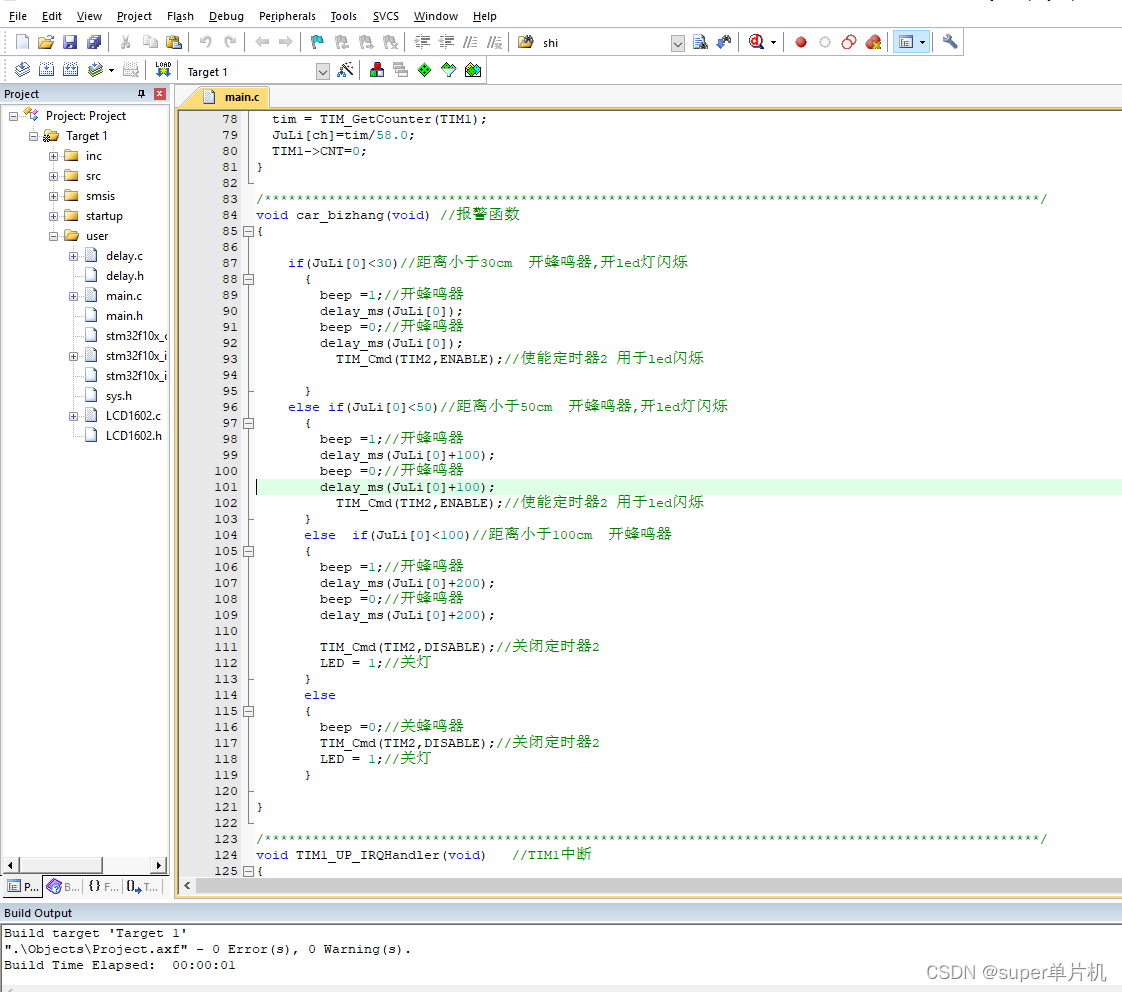
程序部分展示(有中文注释,新手容易看懂)
/****全局变量******************************************/
uint8_t dis0[20];//液晶显示数组
float JuLi[4];//距离 0 正常前进时候的距离
uchar start_stop_bit=0;
/**********函数申明(具体功能看原函数注释)****************************************/
void Tim1_Init(void);//定时器1初始化 计算超声波距离
void TIM1_UP_IRQHandler(void) ; //TIM1中断
void Tim2_Init(void);//定时器2初始化 0.5更新中断
void TIM2_IRQHandler(void);
void GPIO_MOTOR_INIT(void);
void GPIO_SRF04_INIT(void);//超神波引脚初始化
void SRF04(unsigned char ch); //超神波测量函数
void GPIO_SRF04_INIT(void);//超神波引脚初始化
void car_bizhang(void);
void GPIO_KEY_INIT(void);//按键引脚初始化
/*****************************************
main函数
*****************************************/
int main(void){
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//中断向量分组 2
//io初始化
GPIO_MOTOR_INIT();//led灯,蜂鸣器初始化
GPIO_SRF04_INIT();//超声波引脚
GPIO_KEY_INIT();//按键引脚
//定时器初始化
Tim1_Init();
Tim2_Init();
//1602液晶
LCD_init(); //LCD1602初始化
LCD_clr();//LCD清屏幕
//主循环
while (1)
{
if(!k1)//开始停止按键
{
while(!k1);
LCD_clr();//清屏幕
start_stop_bit=!start_stop_bit;//切换模式
if(start_stop_bit)///运行状态下显示下面字符
{
sprintf(dis0,"====Reverse====\n");//更新显示
LCD_Write_String(0,0,dis0);//
}
else
{
beep =0;//关蜂鸣器
TIM_Cmd(TIM2,DISABLE);//关闭定时器2
LED = 1;//关灯
}
}
if(start_stop_bit)//运行状态
{
//超声波测距
SRF04(0);
car_bizhang(); //报警状态函数
sprintf(dis0,"%3.0fCM\n",JuLi[0]);//更新显示
LCD_Write_String(5,1,dis0);
}
}
}
/*************************************************************************************************/
void SRF04(unsigned char ch) //超神波测量函数
{
int delay=0xFf;
u16 tim;
GPIO_ResetBits(SRF04_PORT,SRF04_TR_PIN);
delay_us(20);
GPIO_SetBits(SRF04_PORT,SRF04_TR_PIN);
while(!GPIO_ReadInputDataBit(GPIOA,SRF04_ECHO_PIN));
TIM_Cmd(TIM1,ENABLE);
while(GPIO_ReadInputDataBit(GPIOA,SRF04_ECHO_PIN));
TIM_Cmd(TIM1,DISABLE);
tim = TIM_GetCounter(TIM1);
JuLi[ch]=tim/58.0;
TIM1->CNT=0;
}
stm32单片机最小系统讲解:
电源
电就是MCU要吃的饭,不吃饭,stm32芯片肯定不能工作。
stm32最小系统板需要5v和3.3v两种电压,一般可以直接通过USB提供5v电压,也可以用电源适配器提供5V电压。而3.3v电压可以通过稳压芯片如ASM1117-3.3v等,把5v电压降为3.3v输出。
参考电源电路如下:

图中J1是USB接口,提供的5v电压经过ASM1117-3.3v后降为3v3,C1,C2(10*10^4pF=0.1u)用于电源滤波,高频滤波用小电容,低频滤波用大电容。D3是一个led用以指示电源工况,其上的R1 510R即510.0Ω用以限流,防止led灯烧坏。
J3也是一个USB接口,提供5v电压,同时它也是一个模拟串口,其D-和D+引脚与ch340相应引脚连接构成一个串口设备。
stm32吃的是3v3将其VDD和VSS引脚分别连接到3v3和GND,就解决了stm32的吃饭问题。
注意:VBAT是stm32芯片的备用3.3v电源输入端,当没有备用电源是也需要将VBAT接到VDD上去。
VDDA和VSSA是模拟电源输入口,用以给stm32芯片内部ADC,复位电路供电因此必须分别接到VDD和VSS上。
复位电路
人工作久了容易自闭、精神恍惚,这时需要睡一觉就以重新焕发活力。stm32工作久了也容易“精神恍惚”————程序跑飞,也需要复位。

stm32的NRST引脚是复位信号接收引脚与RESET相连,芯片低电平复位。如上图所示,当芯片刚上电时,电容充电导通,此时RESET=0,芯片复位;当按下复位按钮时,RESET接地,芯片复位。
晶振电路
晶振是芯片的心跳,每一次脉冲激励芯片执行一条指令,因此晶振的重要性不言而喻。

上图是stm32的晶振电路,8M无源晶振,其中R9(1M)用于稳定晶振的脉冲波形,C8(20P)和C9(20P)一方面构成晶振起振的必要回路,另一方面匹配电容,同时还具有调节晶振电路频率的作用。
注意:OSC32IN是外部32.768K晶振输入口,可以直接接时钟信号,也可以不洁作IO用。OSCIN是外部系统时钟输入信号,可以接时钟信号,也可以不接做IO口用,此时stm32用芯片内部的RC电路起振产生时钟信号。
资料分享下载链接:216-基于stm32单片机智能导盲拐杖(程序+仿真+全套资料)



