
- 1Linux signal小结_linux信号列表
- 2Vue-Uni-App小程序实现身份证识别_uniapp身份证识别
- 3IIS/IIS Express中遇到的证书问题,此网站的安全证书存在问题。_the remote certificate is invalid according to the
- 4CV最新论文|4月8日 arXiv更新论文合集_seg_pn
- 5SQL Server的介绍、安装与卸载(包括SSMS管理工具安装)_sql server是什么软件
- 6Linux/Shell date format: date +“%Y%m%d_%H_%M_%S“_date=$(date "+%y%m%d%h%m%s")
- 7最新技术整理3款开源免费直播推流工具,实现实时视频推流、视频拉流,目标端可以是服务器、云平台、移动设备等(附源码)_推流软件
- 8以太坊—JSON RPC API
- 9Mac版JFormDesigner IDEA插件安装(非商业用途)_mac idea 激活jform
- 10LSTM多步时间序列预测+区间预测(附代码实现)_lstm多步预测
ArduPlane——ArduPilot—— 框架概述
赞
踩
版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接
最近开始学习下Ardupilot里固定翼Arduplane的相关知识,一些关键基础的拿出来学习分享,以便回顾知新!
首先来一张arduplane的代码框架图,以便梳理代码流程,直观容易理解(连代码库以及cpp文件都标记的如此清楚,开源 的真是越来越666了)。
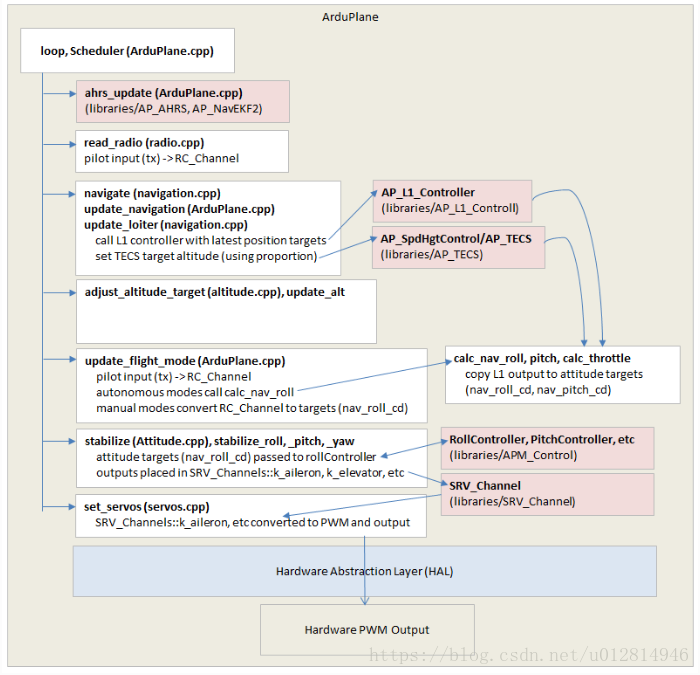
框架中几个主要的步骤:
ahrs_update:调用EKF获取最新的传感器数据并对姿态和位置进行估计。
read_radio : 读取自动驾驶仪的输入并计算出适当的姿态或位置目标。
navigate:调用L1控制器和TECS(全局能量控制系统)控制器(见下文)来提供位置目标给roll、pitch、throttle控制器。
update_flight_mode : 将L1控制器的roll和pitch目标复制给nav_roll_cd和nav_pitch_cd这两个全局变量。
stabilize :执行较低级别的roll,pitch和throttle控制器。
set_servos : 将来自roll,pitch和throttle控制器的输出发送到相应的伺服,作为伺服的输入。
ArduPlane 控制器
如下图所示,Plane有2个较为上层的控制器和4个较为底层的控制器。
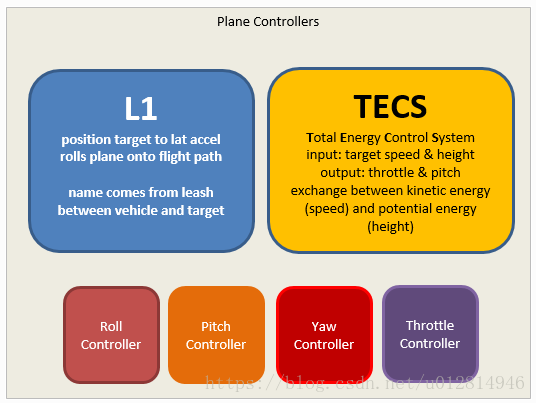
1. L1控制器将起点和目的地(每一个都用纬度和经度来表示)转换成横向加速度,以使飞机沿着从起点到目的地的路径水平飞行。想要继续了解L1导航算法,可以看L1 control——ArduPilot——更新航点update_waypoint(一)&&L1 control——ArduPilot——更新航点update_waypoint(二)&& L1 control——ArduPilot——更新圆圈update_Loiter这三篇博客。
2. TECS(全局能量控制系统)控制飞机的动能(即速度)与其势能(即高度)之间的交换。它的输入是一个目标速度和高度,它试图通过计算目标throttle和pitch值,然后传递到下面的pitch和throttle控制器来达到这些目标。想要了解更多的TECS可以去看TECS—ArduPilot—代码框架理解
本文只是提供一个固定翼的代码框架,便于梳理代码流程,进一步学习
相关ArduPilot的学习博客链接:

