
- 1Cubemx平衡车开发过程(STM32F103C8T6)_stm32f103c8t6平衡小车cube
- 2SQL Server 数据库高级编程(T-SQL)笔记_sql server数据库编程
- 3访问elasticsearch集群提示ERROR 新增es数据失败,后台日志返回413 Request Entity Too Larg
- 4微信小程序中调取小程序实现报错:提示 开发版小程序已过期,请在开发者工具中重新扫码的 解决方案
- 5IDEA修改GitLab用户名_idea gitlab token 改为用户名登录
- 6常见的下载工具有哪些?BT下载软件哪个好
- 7中国IT工作者35岁后的发展出路调查报告(转载)_35岁以后失业的出路
- 8linux的rscd服务,Windows ftp脚本和RSCD agent自动安装脚本
- 9【RabbitMQ】RabbitMQ 消息的可靠性 —— 生产者和消费者消息的确认,消息的持久化以及消费失败的重试机制_rabbitmq 生产者消息确认
- 10单位工作制度牌展示_员工工号牌管理制度
机器人电机综述 — 电机分类、舵机、步进与伺服、物理性质和伺服控制系统_机器人负载惯量比
赞
踩
电机综述
图片与部分素材来自知乎大佬不看后悔!最全的电机分类,看这一篇就够了! - 知乎 (zhihu.com),本文只是把机器人中常用的电机知识提炼了一下
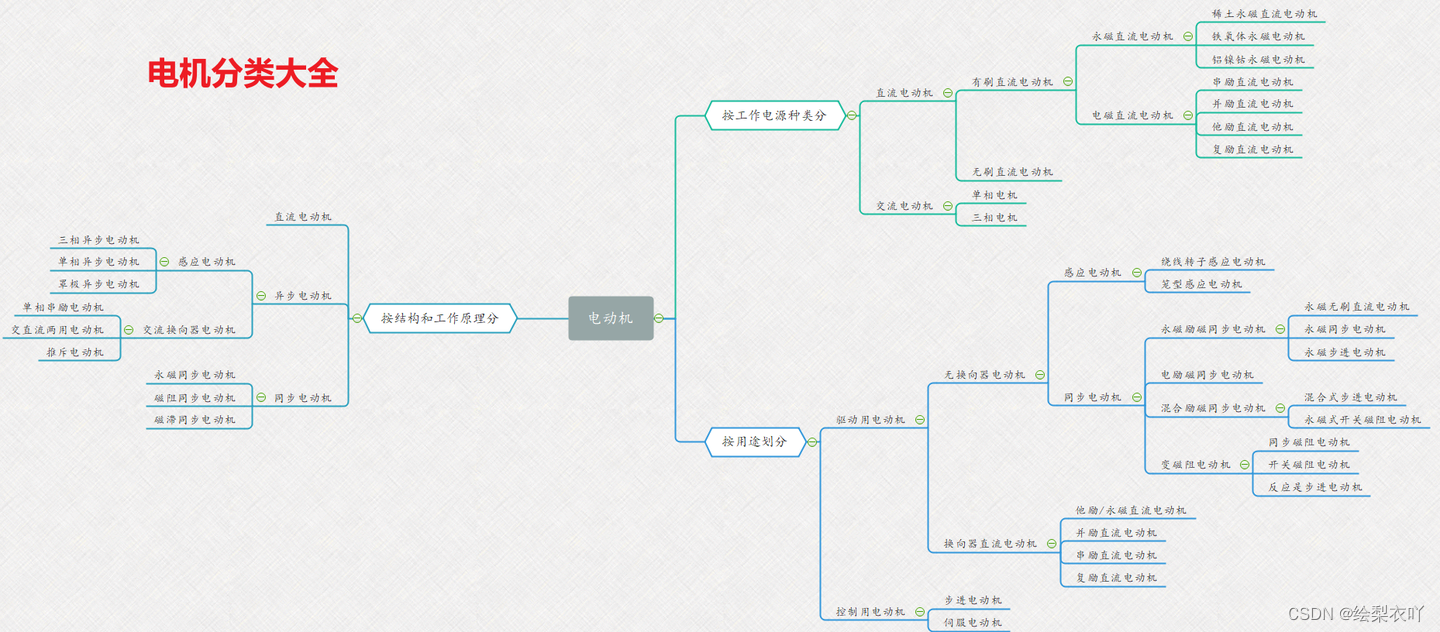
1 按照结构和工作原理划分
1. 同步电机
电机的转速与定子磁场的转速相同步
2. 异步电机
电机转速达不到定子磁场的同步转速
- **感应电动机:**在定子回路中通入三相交流电,三相不断变换,进而形成的磁场方向不断变化,从而转子想当于作了切割磁感线的动作,进而形成感应电流,产生力,推动其转动
- **交流换向电动机:**电机通入交流电,经过换向器,换向器将其原始波形处理成半个波形,也就是正弦的一半,原理是电磁感应
2 按工作电源分类
1. 直流电机
- 有刷电机
- 无刷电机
2. 交流电机
- 单相电机
- 三相电机
3 按电机用途划分
- 控制用电机
- **步进电机:**电脉冲信号转换成角位移或者线位移的电动机,每一个脉冲信号,对应的有一个角度,转速与脉冲频率有关
- **伺服电机:**服从控制信号的要求而动作
- 驱动用电机
- 无换向器电机
- 有换向器电机
4 舵机
就是低端一点的伺服电机系统,也是最常见的伺服电机系统
- PWM信号舵机
- RS-485串口舵机
- TTL串口舵机
- CAN总线舵机
5 步进电机与伺服电机
1. 步进电机
- 当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”
- 通常工业用混合型步进电机的步距角是1.8度,就是200极(极等同于步)
2. 伺服电机
- **伺服系统:**服从控制信号的要求而动作,在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。既可以是开环控制方式,也可以是闭环控制方式
- **伺服系统构成:**被控对象、执行器和控制器
- **执行器:**执行器的功能在于提供被控对象的动力,其构成主要包括伺服电动机和功率放大器,伺服电动机包括反馈装置如光电编码器、旋转编码器或光栅等(位置传感器)
- **控制器:**控制器的功能在于提供整个伺服系统的闭环控制如转矩控制、速度控制、位置控制等
- 交流伺服电动机的运行需要角度位置传感器,以确定各个时刻转子磁极相对于定子绕组转过的角度,从而控制电动机的运行
- 伺服系统常用的检测元件以光电编码器最为常见
- **增量式编码器:**每转过单位的角度就发出一个脉冲信号
- **绝对式编码器:**对应一圈,运动部件的每一运动位置都有一个对应的编码,常以多位二进制码来表示,通过外部记圈器件可以进行多个位置的记录和测量
6 物理性质
1. 转动惯量
惯量是惯性大小的量度
- I I I:转动惯量
- m m m:质量
- r r r:质点和转轴的垂直距离
I = m r 2 I = mr^2 I=mr2
2. 转动惯量与转矩(Nm)
- M M M:转矩
- I I I:转动惯量
- β \beta β:加速度
M = I β M = I\beta M=Iβ
3. 矩
- **力矩:**力对刚体转动的影响,不仅与力的大小和方向有关,还与力相对于转矩的位置有关
- **转矩:**转矩即转动力矩,一般指旋转的物体所受到的力矩
- **扭矩:**任何元件在转矩的作用下,必定产生某种程度的扭转变形,因此习惯上又常把转动力矩叫扭转力矩,简称扭矩
4. 负载惯量比
负载惯量比是负载惯量与伺服电动机轴惯量之比的简称
- **电机惯量:**转子本身的惯量。从响应角度来讲,电机的转子惯量应小为好;从负载角度来看,电机的转子惯量越大越好
- **负载惯量:**机械负载总惯量
7 伺服系统控制
1. 调节器
- APR(Automatic Current Regulator)——位置调节器
- ASR(Automatic Speed Regulator)——速度调节器
- ACR(Automatic Voltage Regulator)——电流调节器
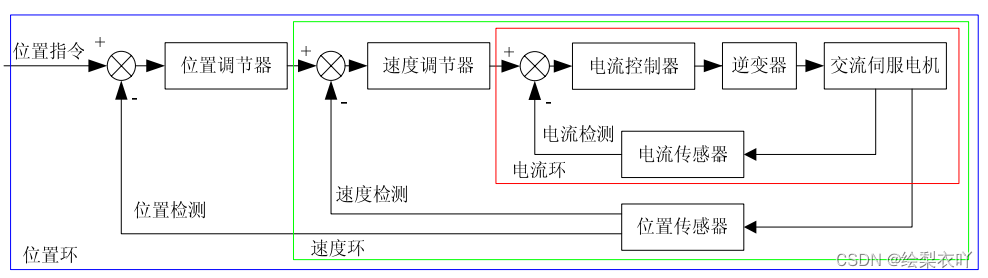
2. 控制系统
伺服电机控制系统一般三环PID控制系统,从内到外是电流环、速度环和位置环
- **电流环:**第一环为电流环,最内环,此环完全在伺服驱动器内部进行,其PID常数已被设定,无需更改。电流环的输入是速度环PID调节后的输出,电流环的输出就是电机的每相的相电流。电流环的功能为对输入值和电流环反馈值的差值进行PD/PID调节
- **速度环:**第二环为速度环,中环。速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值。电流环的功能为对输入值和速度环反馈值的差值(即速度差)进行PI调节
- **位置环:**第三环为位置环,最外环。位置环的输入就是外部的脉冲。位置环的功能为对输入值和位置环反馈值的差值(即滞留脉冲)进行P调节
3. 控制方式
- **转矩控制(电流环/单环控制):**转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现
- **速度控制(速度环、电流环/双环控制):**通过模拟量的输入或脉冲的频率都可以进行转动速度的控制。速度控制包含了速度环和电流环。任何模式都必须使用电流环,电流环是控制的跟本
- **位置控制(三环控制):**伺服中最常用的控制。位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度(称之为脉冲伺服);也有些伺服可以通过总线通讯方式直接对速度和位移进行赋值(称之为总线伺服)


