
- 1盲盒一番赏小程序:打开未知的惊喜之旅
- 2GPT-3.5和GPT-Plus的区别_chat gpt3.5镜像
- 3SQL Server Oracle MySQL PostgresSQL 的对比_pgsql和oracle,mysql对比总结
- 4【学习记录】Open-WebUI 非Docker安装_openwebui 非容器化部署
- 5解决paddle.fluid与python版本不匹配的问题:AttributeError: module ‘paddle.fluid‘ has no attribute ‘xxx‘_attributeerror: module 'paddle.fluid.libpaddle' ha
- 6常见的基础算法_基础算法有哪些
- 7Hadoop集群启动,指令start-all.sh 但slave节点没有datanode_hadoop集群master开启dfs slave怎么没有
- 8timerfd_settime 中 TFD_TIMER_ABSTIME 用法
- 9自然语言处理的主要工具和库
- 10Failed to get nestedarchive for entry BOOT-INF/lib/axis2-1.6.2.pom_failed to get nested archive for entry
动态规划入门——数字三角形问题(The Triangle)Poj1163_triangle problem 动态规划
赞
踩
(这篇文章写的非常好,思路清晰,浅显易懂,反正我是一遍就看明白了,感谢大神)
动态规划相信大家都知道,动态规划算法也是新手在刚接触算法设计时很苦恼的问题,有时候觉得难以理解,但是真正理解之后,就会觉得动态规划其实并没有想象中那么难。网上也有很多关于讲解动态规划的文章,大多都是叙述概念,讲解原理,让人觉得晦涩难懂,即使一时间看懂了,发现当自己做题的时候又会觉得无所适从。我觉得,理解算法最重要的还是在于练习,只有通过自己练习,才可以更快地提升。话不多说,接下来,下面我就通过一个例子来一步一步讲解动态规划是怎样使用的,只有知道怎样使用,才能更好地理解,而不是一味地对概念和原理进行反复琢磨。
首先,我们看一下这道题(此题目来源于北大POJ):
http://poj.org/problem?id=1163
数字三角形(POJ1163)
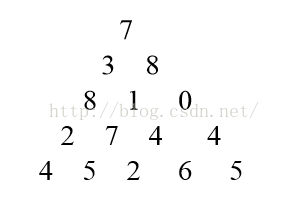
在上面的数字三角形中寻找一条从顶部到底边的路径,使得路径上所经过的数字之和最大。路径上的每一步都只能往左下或 右下走。只需要求出这个最大和即可,不必给出具体路径。 三角形的行数大于1小于等于100,数字为 0 - 99
输入格式:
5 //表示三角形的行数 接下来输入三角形
7
3 8
8 1 0
2 7 4 4
4 5 2 6 5
要求输出最大和
接下来,我们来分析一下解题思路:
首先,肯定得用二维数组来存放数字三角形
然后我们用D( r, j) 来表示第r行第 j 个数字(r,j从1开始算)
我们用MaxSum(r, j)表示从D(r,j)到底边的各条路径中,最佳路径的数字之和。
因此,此题的最终问题就变成了求 MaxSum(1,1)
当我们看到这个题目的时候,首先想到的就是可以用简单的递归来解题:
D(r, j)出发,下一步只能走D(r+1,j)或者D(r+1, j+1)。故对于N行的三角形,我们可以写出如下的递归式:
- if ( r == N)
- MaxSum(r,j) = D(r,j)
- else
- MaxSum( r, j) = Max{ MaxSum(r+1,j), MaxSum(r+1,j+1) } + D(r,j)
根据上面这个简单的递归式,我们就可以很轻松地写出完整的递归代码:
- #include <iostream>
- #include <algorithm>
- #define MAX 101
- using namespace std;
- int D[MAX][MAX];
- int n;
- int MaxSum(int i, int j){
- if(i==n)
- return D[i][j];
- int x = MaxSum(i+1,j);
- int y = MaxSum(i+1,j+1);
- return max(x,y)+D[i][j];
- }
- int main(){
- int i,j;
- cin >> n;
- for(i=1;i<=n;i++)
- for(j=1;j<=i;j++)
- cin >> D[i][j];
- cout << MaxSum(1,1) << endl;
- }

对于如上这段递归的代码,当我提交到POJ时,会显示如下结果:

对的,代码运行超时了,为什么会超时呢?
答案很简单,因为我们重复计算了,当我们在进行递归时,计算机帮我们计算的过程如下图:
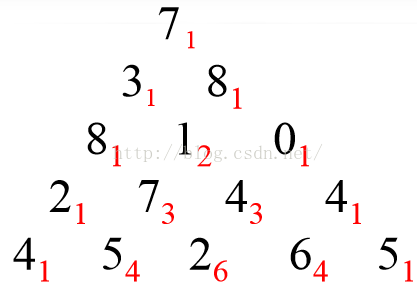
就拿第三行数字1来说,当我们计算从第2行的数字3开始的MaxSum时会计算出从1开始的MaxSum,当我们计算从第二行的数字8开始的MaxSum的时候又会计算一次从1开始的MaxSum,也就是说有重复计算。这样就浪费了大量的时间。也就是说如果采用递规的方法,深度遍历每条路径,存在大量重复计算。则时间复杂度为 2的n次方,对于 n = 100 行,肯定超时。
接下来,我们就要考虑如何进行改进,我们自然而然就可以想到如果每算出一个MaxSum(r,j)就保存起来,下次用到其值的时候直接取用,则可免去重复计算。那么可以用n方的时间复杂度完成计算。因为三角形的数字总数是 n(n+1)/2
根据这个思路,我们就可以将上面的代码进行改进,使之成为记忆递归型的动态规划程序:
- #include <iostream>
- #include <algorithm>
- using namespace std;
-
- #define MAX 101
-
- int D[MAX][MAX];
- int n;
- int maxSum[MAX][MAX];
-
- int MaxSum(int i, int j){
- if( maxSum[i][j] != -1 )
- return maxSum[i][j];
- if(i==n)
- maxSum[i][j] = D[i][j];
- else{
- int x = MaxSum(i+1,j);
- int y = MaxSum(i+1,j+1);
- maxSum[i][j] = max(x,y)+ D[i][j];
- }
- return maxSum[i][j];
- }
- int main(){
- int i,j;
- cin >> n;
- for(i=1;i<=n;i++)
- for(j=1;j<=i;j++) {
- cin >> D[i][j];
- maxSum[i][j] = -1;
- }
- cout << MaxSum(1,1) << endl;
- }
当我们提交如上代码时,结果就是一次AC
虽然在短时间内就AC了。但是,我们并不能满足于这样的代码,因为递归总是需要使用大量堆栈上的空间,很容易造成栈溢出,我们现在就要考虑如何把递归转换为递推,让我们一步一步来完成这个过程。

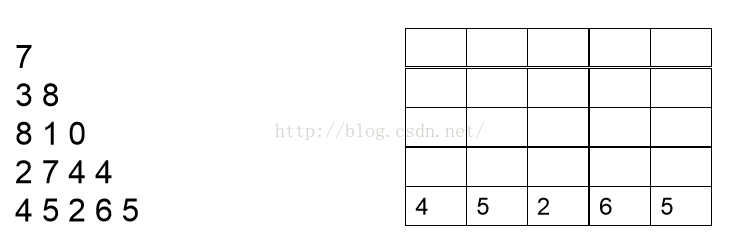
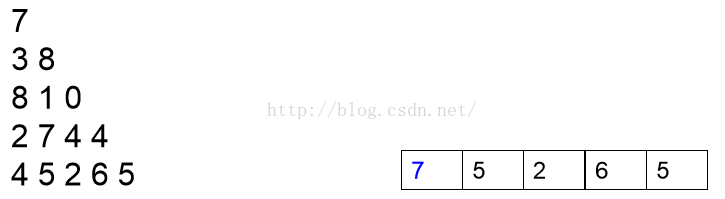
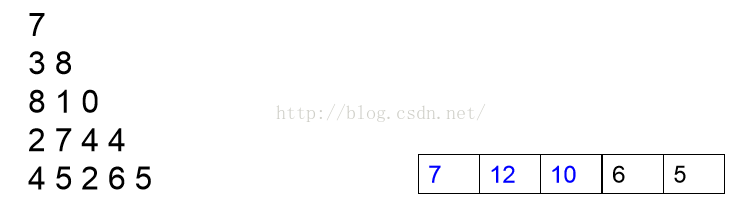
我们首先需要计算的是最后一行,因此可以把最后一行直接写出,如下图:
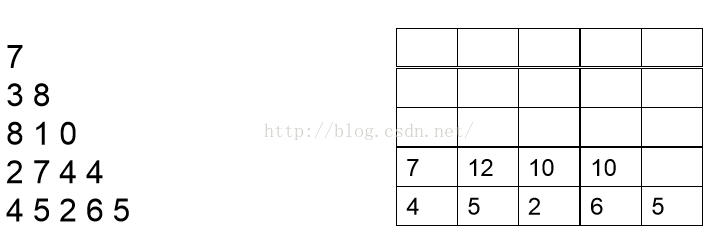
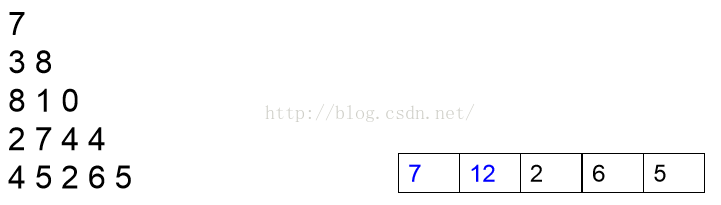
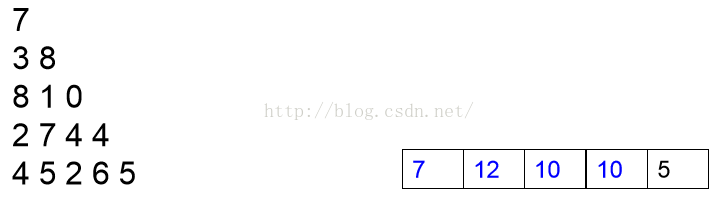
现在开始分析倒数第二行的每一个数,现分析数字2,2可以和最后一行4相加,也可以和最后一行的5相加,但是很显然和5相加要更大一点,结果为7,我们此时就可以将7保存起来,然后分析数字7,7可以和最后一行的5相加,也可以和最后一行的2相加,很显然和5相加更大,结果为12,因此我们将12保存起来。以此类推。。我们可以得到下面这张图:
然后按同样的道理分析倒数第三行和倒数第四行,最后分析第一行,我们可以依次得到如下结果:
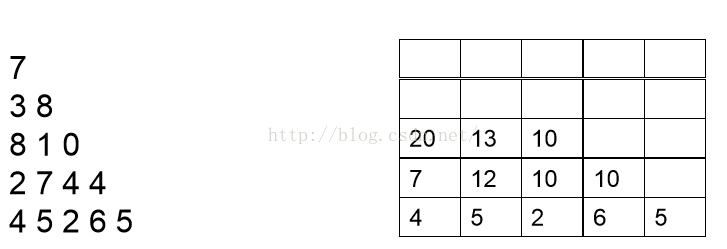
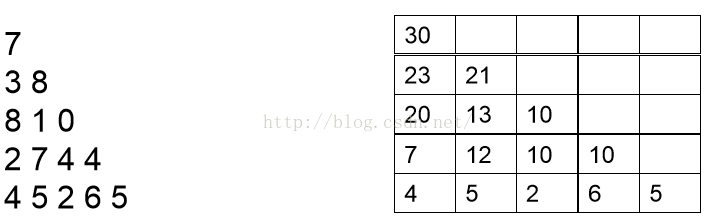
上面的推导过程相信大家不难理解,理解之后我们就可以写出如下的递推型动态规划程序:
- #include <iostream>
- #include <algorithm>
- using namespace std;
-
- #define MAX 101
-
- int D[MAX][MAX];
- int n;
- int maxSum[MAX][MAX];
- int main(){
- int i,j;
- cin >> n;
- for(i=1;i<=n;i++)
- for(j=1;j<=i;j++)
- cin >> D[i][j];
- for( int i = 1;i <= n; ++ i )
- maxSum[n][i] = D[n][i];
- for( int i = n-1; i>= 1; --i )
- for( int j = 1; j <= i; ++j )
- maxSum[i][j] = max(maxSum[i+1][j],maxSum[i+1][j+1]) + D[i][j];
- cout << maxSum[1][1] << endl;
- }
我们的代码仅仅是这样就够了吗?当然不是,我们仍然可以继续优化,而这个优化当然是对于空间进行优化,其实完全没必要用二维maxSum数组存储每一个MaxSum(r,j),只要从底层一行行向上递推,那么只要一维数组maxSum[100]即可,即只要存储一行的MaxSum值就可以。
对于空间优化后的具体递推过程如下:


接下里的步骤就按上图的过程一步一步推导就可以了。进一步考虑,我们甚至可以连maxSum数组都可以不要,直接用D的第n行直接替代maxSum即可。但是这里需要强调的是:虽然节省空间,但是时间复杂度还是不变的。
依照上面的方式,我们可以写出如下代码:
- #include <iostream>
- #include <algorithm>
- using namespace std;
-
- #define MAX 101
-
- int D[MAX][MAX];
- int n;
- int * maxSum;
-
- int main(){
- int i,j;
- cin >> n;
- for(i=1;i<=n;i++)
- for(j=1;j<=i;j++)
- cin >> D[i][j];
- maxSum = D[n]; //maxSum指向第n行
- for( int i = n-1; i>= 1; --i )
- for( int j = 1; j <= i; ++j )
- maxSum[j] = max(maxSum[j],maxSum[j+1]) + D[i][j];
- cout << maxSum[1] << endl;
- }
接下来,我们就进行一下总结:
递归到动规的一般转化方法
递归函数有n个参数,就定义一个n维的数组,数组的下标是递归函数参数的取值范围,数组元素的值是递归函数的返回值,这样就可以从边界值开始, 逐步填充数组,相当于计算递归函数值的逆过程。
动规解题的一般思路
1. 将原问题分解为子问题
- 把原问题分解为若干个子问题,子问题和原问题形式相同或类似,只不过规模变小了。子问题都解决,原问题即解决(数字三角形例)。
- 子问题的解一旦求出就会被保存,所以每个子问题只需求 解一次。
2.确定状态
- 在用动态规划解题时,我们往往将和子问题相关的各个变量的一组取值,称之为一个“状 态”。一个“状态”对应于一个或多个子问题, 所谓某个“状态”下的“值”,就是这个“状 态”所对应的子问题的解。
- 所有“状态”的集合,构成问题的“状态空间”。“状态空间”的大小,与用动态规划解决问题的时间复杂度直接相关。 在数字三角形的例子里,一共有N×(N+1)/2个数字,所以这个问题的状态空间里一共就有N×(N+1)/2个状态。
整个问题的时间复杂度是状态数目乘以计算每个状态所需时间。在数字三角形里每个“状态”只需要经过一次,且在每个状态上作计算所花的时间都是和N无关的常数。
3.确定一些初始状态(边界状态)的值
以“数字三角形”为例,初始状态就是底边数字,值就是底边数字值。
4. 确定状态转移方程
定义出什么是“状态”,以及在该“状态”下的“值”后,就要找出不同的状态之间如何迁移――即如何从一个或多个“值”已知的 “状态”,求出另一个“状态”的“值”(递推型)。状态的迁移可以用递推公式表示,此递推公式也可被称作“状态转移方程”。
数字三角形的状态转移方程:

能用动规解决的问题的特点
1) 问题具有最优子结构性质。如果问题的最优解所包含的 子问题的解也是最优的,我们就称该问题具有最优子结 构性质。
2) 无后效性。当前的若干个状态值一旦确定,则此后过程的演变就只和这若干个状态的值有关,和之前是采取哪种手段或经过哪条路径演变到当前的这若干个状态,没有关系。

