
- 1黑马 - websocket搭建在线聊天室
- 2YOLO系列算法全家桶——YOLOv1-YOLOv9详细介绍 !!
- 3解决WPF ListView虚拟化ListViewItem的IsSelected属性MVVM双向绑定bool值后出现的绑定错乱的问题_listviewitem 绑定
- 4海康威视isecure center 综合安防管理平台文件上传漏洞复现_综合安防漏洞
- 5json_encode() 中文乱码问题解决方法_json_encode中文
- 6GLM-4多模态重磅更新!摸着OpenAI过河!_glm 智能体
- 7我发现凡是给offer的公司,面试时基本不问技术细节,那些问得又多又细的公司,后面就没下文了!...
- 8全网最详细的MySQL笔记(一)_mysql的newtable
- 9雷达人体存在感应器成品,雷达探测感知联动,空间智能化控制应用
- 10通过Dronekit实现pixhawk2.4.8与树莓派4B通信
STM32CubeMX(02)HAL库之定时器_stm32cubemx定时器函数
赞
踩

前言
前一篇完成了开发板的入门级程序,点亮一个LED灯。今天我们就利用LED+定时器设计一个交通灯,算是实验加小练习了。
大家可以回去看看LED的点亮程序。点亮LED
这个很重要,因为有一些基础配置在这一章,我们这一章着重讲一下定时器。
一、定时器是什么?
定时器是对周期固定的脉冲信号进行计数。这里我就用很通俗的话来说一下。这里以F407为例,407的主频是168M。这里的168M是什么概念呢,就是最大可以以168M的频率记一次数。再通俗一点,就是最最短可1/168M(秒)记一次数。也就是说最短可以0.00000000595s,记一次,那我要记1s,要数多少次,要数168000000次,太多了,所以我们要分频,和规定计数值(就是要数多少次的意思),这样我们就好算了。比如说168M除以168,就是168分频,分频就是÷的意思。那就变成1MHz数一次数,记一秒我只需要数1000000次就行了,当然还有很多很多其他组合,所以我们的定时时间才可以任意设定,
所以定时器主要关心分频系数和计数值,是没有问题的,这两个是决定定时时间的。

1、使用定时器关注的问题


2、 STM32定时器家族

3、定时器的主要功能
定时器真的是很常用的一个模块,无论是输出PWM,还是输入捕获,还是ADC采样,都用到了定时器,
简直不要太强。


二、定时器的总线结构
STM32F4定时器有(14个),基本定时器(2个):TIME6,TIME7,通用定时器(10个):TIME2~5,TIME9 到14,高级定时器(2个):TIME1 , TIME8,为什么要分这么多个,因为应用场景不一样,所以需要用到哪些功能我们可以开哪个。


1、三种定时器功能比较

2、计数器时钟频率计算
这里要注意一下,我们定时器时钟是挂在APB1或者APB2总线上的,通过看上面定时器的总线结构,我们可以看到,通用定时器(10个):TIME2~5,TIME9 到14是挂在APBA2总线上的,也就是说这些定时器最高频率可以达到168MHz,其余的定时器,最大只能达到84M

三、HAL库函数的设计方法
1、计数器时钟频率计算举例
定时器的还有一些相关的寄存器咱就不说了,我们主要关心怎么用,

2、定时器基本配置结构体

3、定时器相关库函数




四、定时翻转LED灯状态(定时中断方式)

1、设计步骤




2、工程配置
1、系统设置
设置SYS debug为串行总线,设置高速外部时钟HSE选择外部时钟源


2、GPIO口设置
这里我以PF8为例,LED0,输出



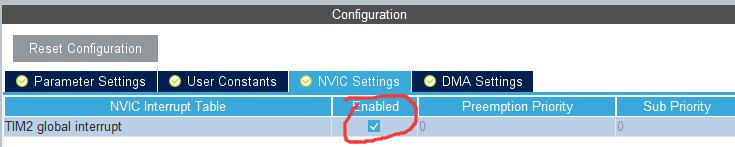
3、定时器2设置
选择内部时钟,设置好分频系数,1s的定时,开区自动重装载,意思是记完了又重新开始记,循环往复,开启定时器中断。

4、时钟设置

5、项目文件设置
这里为何这样配置前面一章也有介绍,这里不在重复。


6、创建工程文件
点击GENERATE CONDE 创建工程

3、例程
在while(1)上方用户代码区初始化使能定时器2

在main.c上方用户代码区初始化添加回调函数,在这个回调函数里面就是我们要做的事情。我们要1S翻转一次,所以我们那就添加翻转的函数。通俗点就是说我每隔一秒必须要回到这个函数,把这个函数里面要做的事情做完我才去做其他事情。


点击我们的魔术棒,进入到debug的setting,一定要勾选Reset and Run,否则是没有现象的。

编译没问题,我们就点击下载到开发板看实验现象。
这是main.c文件,大家可以直接复制,主要是底层的时钟,GPIO,定时器配置好了,事情就简单了。
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2021 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "tim.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ //定时器2中断服务函数 @main.c void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if (htim->Instance == TIM2) { HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_8); } } /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM2_Init(); /* USER CODE BEGIN 2 */ //使能定时器2 HAL_TIM_Base_Start_IT(&htim2); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Configure the main internal regulator output voltage */ __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); /** Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 8; RCC_OscInitStruct.PLL.PLLN = 336; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 4; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
4、实现结果
定时器的定时还是很精确的,我们就是利用定时器的精确定时。这里是1S定时。

总结
定时器可以说是STM32的精髓,大家一定要好好把握,第一次学定时器的时候,我甚至连定时器中断是什么,那是因为当时的知识储备不足,到后来,第二次,第三次学的时候才后知后觉,所以我们是需要一个认知的过程的。代码之路任重道远~,还需多多练习。


