- 1部署Zookeeper集群时遇到的两个坑QuorumCnxManager$Listener@7631Exception和ConnectionLossException: KeeperErrorCode_error [listenerhandler-/169.254.123.6:3888:o.a.z.s
- 2【持续更新】Jetson Nano 人工智能机器人开发实战案例——RosmasterX3A1_ros master uri jetson nano
- 3【数据库学习】分页查询
- 4HardwareBuffer 的 shadow buffer_hardwarebuffer 的 shadow buffer是什么意思
- 5PyTorch的ONNX结合MNIST手写数字数据集的应用(.pth和.onnx的转换与onnx运行时)_invalid_argument : invalid feed input name:input
- 6【TCP】四次挥手(最强详解!!通俗易懂!!)_fin ack
- 7【C/C++】深入理解--函数重载(什么是函数重载?为什么要有函数重载?)
- 8java第10天_java 10天
- 9蓝桥杯C/C++B组历届真题刷题【合集】_蓝桥杯c++历年真题
- 10使用Java获取操作系统和硬件信息_physicalpackagecount
openCV python低通滤波方法汇总_cv2.boxfilter
赞
踩
低通滤波(Low-Pass Filter,简称LPF)可以对图像进行模糊处理,以便去除噪声。究其本质,均为对图像的卷积操作。下面对几种常见的低通滤波函数进行一一讲解,包括:均值滤波cv2.blur()、cv2.boxFilter(),高斯滤波cv2.GaussianBlur(),中值滤波cv2.medianBlur(),双边滤波cv2.bilateralFilter(),2D滤波(自定义卷积核)cv2.filter2D()。
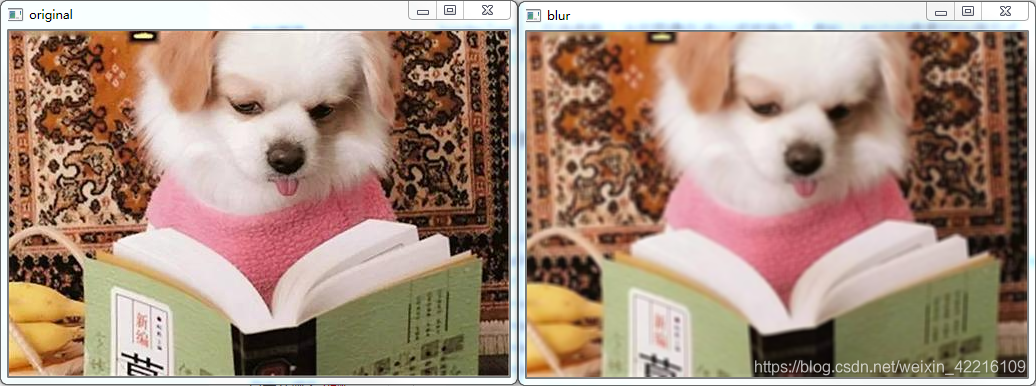
1. 均值滤波,函数cv2.blur(),或者cv2.boxFilter()
均值滤波采用卷积框内各像素值的均值来替代定位点(或称锚点,通常是中间位置)的像素值。
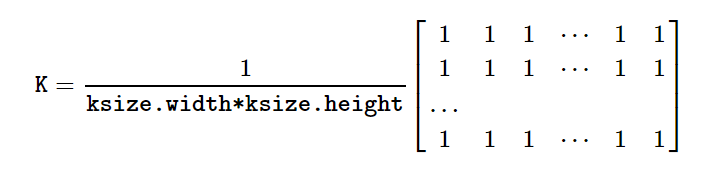
函数cv2.blur(src,ksize[,anchor[,borderType]])
概要:
采用归一化的卷积框(箱式滤波器)模糊图像,卷积框形如:
参数:
- src: 输入的原图像,可以有任意的通道,但是图像深度须为CV_8U,CV_16U,CV_16S,CV_32F,CV_64F
- ksize: 卷积框的尺寸
- anchor: (可选参数)表示定位点或者锚点,默认值为(-1,-1),指的是卷积框的中心
- borderType:(可选参数)决定图像在进行滤波操作(卷积)时边沿像素的处理方式。详情见https://blog.csdn.net/Kelvin_Yan/article/details/50515235?utm_source=blogxgwz6
返回值:
模糊化后的图像
e.g.
- import cv2
- img_original=cv2.imread('E:\ShannonT\\notebook workspace\\images\\4.23.6.jpg')
- #均值滤波
- img_blur=cv2.blur(img_original,(5,5))
- cv2.imshow('original',img_original)
- cv2.imshow('blur',img_blur)
- cv2.waitKey()
- cv2.destroyAllWindows()
效果如下:
函数cv2.boxFilter(src,ddepth,ksize[,anchor[,normalize[,borderType]]])
概要:
采用卷积框(箱式滤波器)模糊图像,卷积框如下所示:
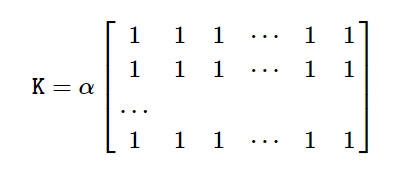
其中

参数:
- src: 输入的图像
- ddepth: 输出图像的深度,-1表示与原图像深度相同
- ksize: 卷积框的尺寸
- anchor: (可选参数)表示定位点,默认值为(-1,-1),指的是卷积框的中心
- normalize: (可选参数)当normalize=True表示卷积核归一化,此时效果等同于cv2.blur()
- borderType:(可选参数)决定图像在进行滤波操作(卷积)时边沿像素的处理方式
返回值:
模糊化后的图像
e.g.
img_blur=cv2.boxFilter(img_original,-1,(5,5))2. 高斯滤波,函数cv2.GaussianBlur()
卷积核换成高斯核(即卷积核中心的值最大,其余位置根据距离中心元素的距离递减),即将均值滤波的求平均值改为求加权平均值。通常用来处理高斯噪声,卷积框形如:
函数cv2.GaussianBlur(src,ksize,sigmaX[,sigmaY[,borderType]])
概述:
采用高斯核模糊图像
参数:
- src: 任意通道数的输入图像
- ksize: 卷积框的尺寸,宽度和高度可以不同,但必须为正奇数;或者可以为0,然后由sigma计算得出
- sigmaX: X方向的标准差。标准差越小,中间位置权值越大,模糊越不明显
- sigmaY: (可选参数),若只指定了sigmaX的值,sigmaY取相同值;若都为0,则由ksize.height和ksize.width计算出来
- borderType:(可选参数)决定图像在进行滤波操作(卷积)时边沿像素的处理方式
返回值:
模糊化后的图像
e.g.
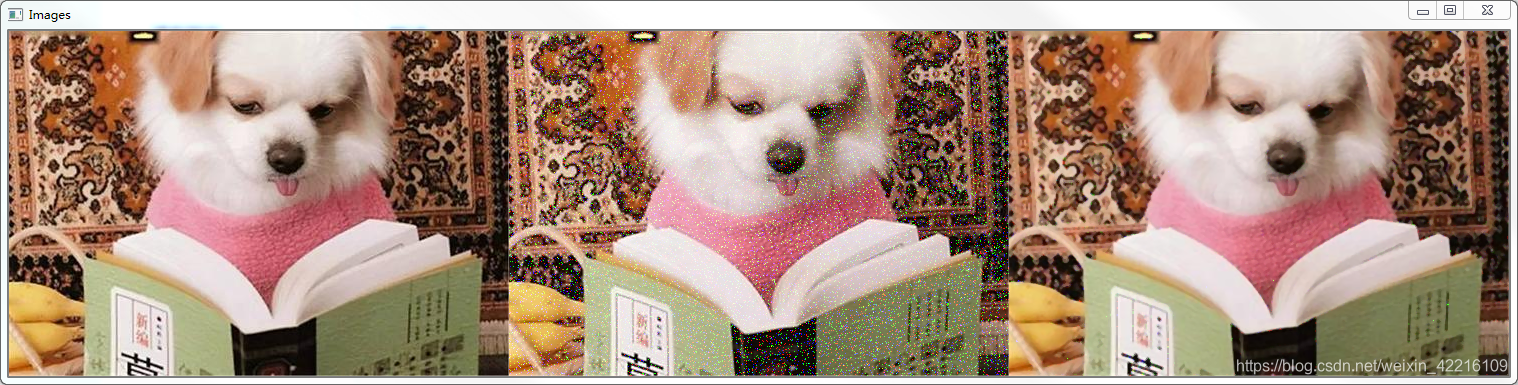
给原图添加一个高斯噪声,并且进行高斯滤波,最后按照原图、高斯噪声图、模糊化图的顺序显示图片
- import cv2
- import skimage
- import numpy as np
- #载入原图,并且归一化
- img_original=cv2.imread('E:\ShannonT\\notebook workspace\\images\\4.23.6.jpg')
- img_original_standard=img_original/255
- #添加高斯噪声,函数返回的归一化的多维数组
- img_noise=skimage.util.random_noise(img_original_standard,mode='gaussian')
- #高斯滤波
- img_blur=cv2.GaussianBlur(img_noise,(5,5),9)
- #按照原图,高斯噪声图,模糊化图的顺序显示图片
- imgs=[img_original,img_noise,img_blur]
- imgs=np.hstack([img_original_standard,img_noise,img_blur])
- cv2.imshow('Images',imgs)
- cv2.waitKey()
- cv2.destroyAllWindows()

效果显示如下:

3. 中值滤波,函数cv2.medianBlur()
用与卷积框对应位置像素的中值来替代中心像素的值,通常用来处理椒盐噪声。
函数cv2.medianBlur(src,ksize)
概述:
使用中值滤波器模糊图像
参数:
- src: 输入任意通道的图像,但是图像深度只能是CV_8U, CV_16U, or CV_32F,对于更大的孔径尺寸,只能是CV_8U,因此输入图像不能为归一化的数组。
- ksize:孔径线性尺寸; 它必须是奇数且大于1,例如:3,5,7 ......
返回值:
模糊化后的图像
e.g.
给原图添加一个椒盐噪声,并且进行中值滤波,最后按照原图、椒盐噪声图、模糊化图的顺序显示图片
- import cv2
- import skimage
- import numpy as np
- #载入原图,并且归一化
- img_original=cv2.imread('E:\ShannonT\\notebook workspace\\images\\4.23.6.jpg')
- img_original_standard=img_original/255
- #添加椒盐噪声,函数返回的归一化的多维数组,由于cv2.medianBlur()输入图像不能为归一化数组,所以转为'uint8'
- img_noise=skimage.util.random_noise(img_original_standard,mode='salt')
- img_noise_8U=(img_noise*255).astype(np.uint8)
- #中值滤波
- img_blur=cv2.medianBlur(img_noise_8U,3)
- #按照原图,椒盐噪声图,模糊化图的顺序显示图片
- imgs=[img_original,img_noise_8U,img_blur]
- imgs=np.hstack([img_original,img_noise_8U,img_blur])
- cv2.imshow('Images',imgs)
- cv2.waitKey()
- cv2.destroyAllWindows()
结果显示如下:
4. 双边滤波,函数cv2.bilateralFilter()
双边滤波能在保持边界清晰的情况下有效地去除噪声,通俗点讲均值滤波和中值滤波只考虑了像素值(颜色空间)的影响;而高斯滤波只考虑坐标空间的影响;双边滤波兼顾颜色空间和坐标空间。详情可以参见https://blog.csdn.net/keith_bb/article/details/54427779
函数cv2.bilateralFilter(src,d,sigmaColor,sigmaSpace[,borderType])
概述:
采用双边滤波器模糊图像
参数:
- src: 单通道或者3通道的图像
- d: 像素点的邻域直径,如果取值非正数,则由sigmaSpace计算得到,且与sigmaSpace成比例
- sigmaColor: 颜色空间的高斯函数标准差
- sigmaSpace: 坐标空间的高斯函数标准差,如果d>0,则由d计算得到
- borderType:(可选参数)决定图像在进行滤波操作(卷积)时边沿像素的处理方式
返回值:
模糊化后的图像
e.g.
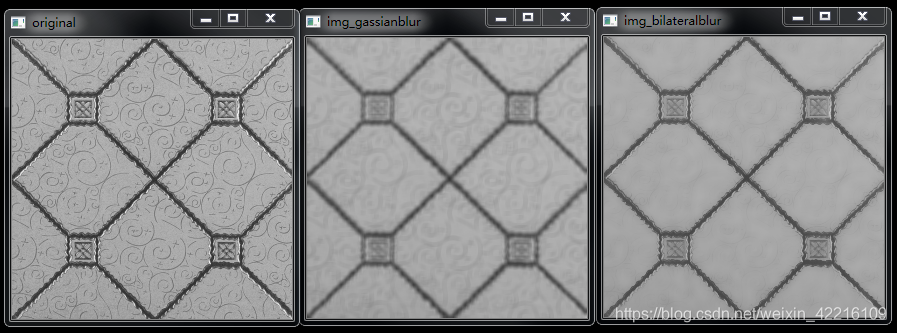
通过对灰度图像分别进行高斯滤波和双边滤波,发现双边滤波可以保持边界的特性
- import cv2
- import numpy as np
- #载入灰度图像并进行适当缩放
- img_original=cv2.imread('E:\ShannonT\\notebook workspace\\images\\4.28.5.jpg',0)
- img_original=cv2.resize(img_original,(0,0),fx=0.5,fy=0.5)
- #高斯滤波
- img_gassianblur=cv2.GaussianBlur(img_original,(5,5),9)
- #双边滤波
- img_bilateralblur=cv2.bilateralFilter(img_original,13,46,8)
- cv2.imshow('original',img_original)
- cv2.imshow('img_gassianblur',img_gassianblur)
- cv2.imshow('img_bilateralblur',img_bilateralblur)
- cv2.waitKey()
- cv2.destroyAllWindows()
效果如下:
5. 自定义卷积核低通滤波,函数cv2.filter2D()
openCV提供的函数cv2.filter2D()实现了对图像的卷积基本操作,我们可以自行设计卷积核,实现均值滤波,高斯滤波等
函数cv2.filter2D(src,ddepth,kernel[,anchor[,delta[,borderType]]])
概述:
使用卷积框对图像进行卷积操作
参数:
- src: 输入的图片
- ddepth: 输出图像的深度,当取值为-1时表示与原图像深度相同
- kernel: 卷积核
- anchor: (可选参数)表示定位点,默认值为(-1,-1),指的是卷积框的中心
- delta: (可选参数)在将目标图像存储进多维数组前,可以将每个像素值增加delta,默认为0
- borderType:(可选参数)决定图像在进行滤波操作(卷积)时边沿像素的处理方式
返回值:
卷积处理后的图像
e.g.
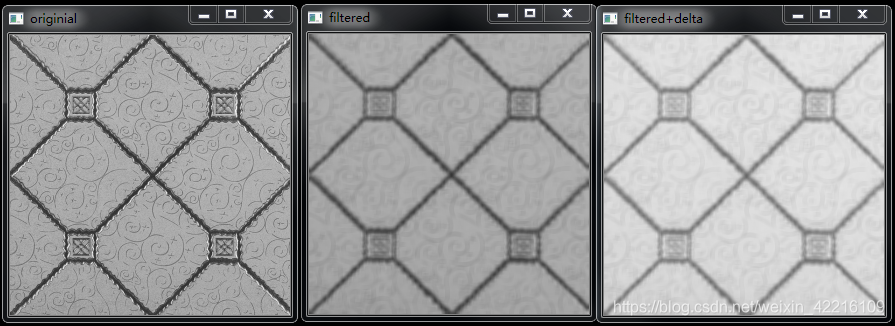
自定义一个卷积核,采用最基本的均值模板,对灰度图像进行卷积操作
- import cv2
- import numpy as np
- #自定义一个均值滤波器
- kernel=np.ones((5,5))/25
- #载入灰度原图
- img_original=cv2.imread('E:\ShannonT\\notebook workspace\\images\\4.28.5.jpg',0)
- img_original=cv2.resize(img_original,(0,0),fx=0.5,fy=0.5)
- #卷积操作,使delta分别为0和50
- img_filter=cv2.filter2D(img_original,-1,kernel,delta=0)
- img_filter_delta=cv2.filter2D(img_original,-1,kernel,delta=50)
- #显示结果
- cv2.imshow('originial',img_original)
- cv2.imshow('filtered',img_filter)
- cv2.imshow('filtered+delta',img_filter_delta)
- cv2.waitKey()
- cv2.destroyAllWindows()
结果显示如下: