
- 12024年AI辅助研发领域的技术突破与创新:智能研发的领航之旅
- 2DrawerLayout+TabLayout+ViewPager+RadioButton+Fragment+pullToRefresh+ImageLoader_安卓 在drawerlayout中创建viewpager和radio
- 3AES算法:数据传输的安全保障
- 4C# 类模板使用
- 5折叠手机和反对创新的战争
- 6BST的后序遍历_bst后序遍历
- 7亚马逊云创建Aws EC2示例+用Xshell7连接登录Aws+设置允许使用root登录_亚马逊 ubuntu xshell密码登录
- 8Oracle数据库入门知识点汇集_oracle 常用资料
- 9Android Studio 每次运行都会再下载一遍_已经下载了android studio 点击提示还要下载是为什么
- 10CSS完美实现图片阴影效果
机器人基础知识一_机器人中 effector是什么
赞
踩
1.六轴机器人中的六轴是什么?
在实际生产中常用的6关节工业机器人有6个可活动的关节(轴),不同的工业机器人本体运动轴的定义也不同。用于保证末端执行器达到工作空间任意位置的轴被称为基本轴或主轴,用于实现末端执行器任意空间姿态的轴,则称为腕部轴或次轴。


常见工业机器人本体运动轴定义表
第一轴:第一轴是链接底盘的位置,也是承重和核心位置,它承载着整个机器人的重量和机器人左右水平的大幅度摆动。
第二轴:控制机器人前后摆动、伸缩的重要一轴。
第三轴:三轴也是控制机器人前后摆动的一轴,不过摆动幅度比第二轴要小很多,不过这也是六轴机器人臂展长的根据。
第四轴:四轴是控制上臂部分180°自由旋转的一轴,相当于人的小臂。
第五轴:第五轴很重要,当你差不多调好位置后,你得精准定位到产品上,就要用到第五轴,相当于人手腕部分。
第六轴:当您将第五轴定位到产品上之后,需要一些微小的改动,就需要用到第六轴,第六轴相当于可以水平360°旋转的一个转盘。可以更精确定位到产品。
6轴机器人通过1、2和3基本轴保证末端执行器达到工作空间任意位置,通过4、5和6轴实现末端执行器的任意空间姿态。因为要实现末端的6自由度动作,所以需要6轴。
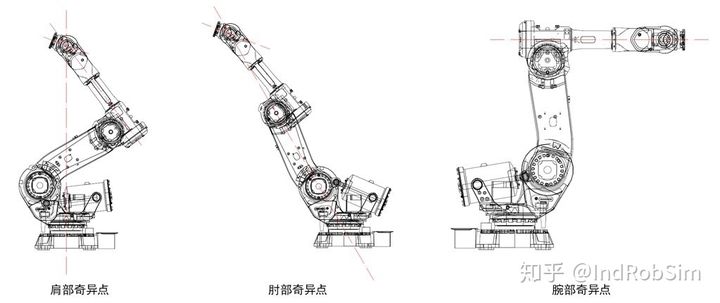
2.奇异点
大部分6轴关节型机器人,由于机械限位或软限位的限制,在其运动空间中会出现逆运动学无解的情况,也就是基于坐标的规划运动无法明确的逆向转化为机器人各个关节轴的旋转角度,在机器人工作空间中这些逆运动学无解的点就被称为“奇异点”。机器人奇异点大致可以分为以下三种类型。
肩部奇异点:肩部奇异点是在机器人手腕的中心与J1轴关节在同一条直线上时发生。这种情况下,会导致关节轴1和4试图瞬间旋转180度。
肘部奇异点:当机器人手腕的中心与关节轴2和3处于同一平面时,会产生肘部奇异点。肘部奇异点看起来像机器人“伸得太远”,导致肘部锁定在某个空间位置。
腕部奇异点:当机器人的两个手腕轴(关节轴4和6)在同一条直线上时,就会发生这种情况,这可能会导致这些关节试图立即旋转180度。
奇异点是因为空间的某个点无法明确的逆向转化为机器人各个关节轴的旋转角度,出现歧义性。
3.并联机器人
并联机器人,英文名为Parallel Mechanism,简称PM,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
4.SKU
sku全称为Stock Keeping Unit(库存量单位),即库存进出计量的基本单元,可以是以件,盒,托盘等为单位。SKU是对于大型连锁超市DC(配送中心)物流管理的一个必要的方法。现在已经被引申为产品统一编号的简称,每种产品均对应有唯一的SKU号。
5.法兰
机器人中法兰一般指的是机器人底盘或机器人关节处的底盘。
6.近端视场和远端视场
近端视场1000*1170@1.2m表示距摄像头1.2m的位置处,横向范围为1m,纵向范围为1.17m。同理,远端视场2910*3360@3.5m表示距摄像头3.5m的位置处,横向范围为2.91m,纵向范围为3.36m。
7.Eye-to-Hand 和 Eye-in-Hand
机器人的视觉系统分为固定场景视觉系统和运动的「手-眼」视觉系统。摄像机与机器人的手部末端,构成手眼视觉系统。根据摄像机与机器人相互位置的不同,手眼视觉系统分为Eye-in-Hand系统和Eye-to-Hand系统。Eye-in-Hand系统的摄像机安装在机器人手部末端(end-effector),在机器人工作过程中随机器人一起运动。Eye-to-Hand系统的摄像机安装在机器人本体外的固定位置,在机器人工作工程中不随机器人一起运动。
8.手眼标定
手眼标定就是机器人的手眼位置关系,也就是机器人末端关节坐标系与摄像机坐标系之间的位置变换关系X,可以用方程AX=XB求解。其中A表示相邻两次运动时机器人末端关节的变换关系,B表示相邻两次运动时摄像机坐标的相对运动。推导过程如下,在推导过程中,我们会用到四个坐标系,分别是:
●基础坐标系(用base表示)
●机械手坐标系(用tool表示)
●相机坐标系(用cam表示)
●标定物坐标系(用cal表示)
下面先给出示意图:

坐标系之间的转换关系说明:
●baseHtool:表示机械手坐标系到基础坐标系的转换关系,可以由机器人系统中得出。(已知)
●toolHcam:表示相机坐标系到机械手坐标系的转换关系;这个转化关系在机械手移动过程中是不变的;(未知,待求)
●calHcam:表示相机坐标系到标定板坐标系的转换关系(相机外參),可以由相机标定求出;(相当于已知)
●baseHcal:表示标定板坐标系到基础坐标系的变换,这个是最终想要得到的结果;只要机械手和标定板的相对位置不变,这个变换矩阵不发生变化。

所以:其中的A已知,X待求,B需要通过相机标定得知。
在相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵X将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。

9.点云
点云是某个坐标系下的点的数据集。点包含了丰富的信息,包括三维坐标 X,Y,Z、颜色、分类值、强度值、时间等等。点云在组成特点上分为两种,一种是有序点云,一种是无序点云。
10.ROI
ROI:感兴趣区域。机器视觉、图像处理中,从被处理的图像以方框、圆、椭圆、不规则多边形等方式勾勒出需要处理的区域,称为感兴趣区域,ROI。
11.掩膜
数字图像处理中掩膜的概念借鉴于PCB制版的过程。在半导体制造中,许多芯片工艺步骤采用光刻技术,用于这些步骤的图形“底片”称为掩膜(也称作“掩模”),其作用是:在硅片上选定的区域中对一个不透明的图形模板遮盖,继而下面的腐蚀或扩散将只影响选定的区域以外的区域。
12.欧拉角
欧拉角是用来确定定点转动刚体的一组独立角参量,由章动角 θ、旋进角(即进动角)ψ和自转角j组成。为欧拉首先提出而得名。它们有多种取法,下面是常见的一种。如图所示,由定点O作出固定坐标系 Oxyz和固连于刚体的动坐标系Ox′y′z′。以轴Oz和Oz′为基本轴,其垂直面Oxy和Ox′y′为基本平面。由轴Oz量到Oz′的角θ称章动角。平面zOz′的垂线ON称节线,它又是基本平面Ox′y′和Oxy的交线。在右手坐标系中,由 ON 的正端看,角θ应按逆时针方向计量。由固定轴 Ox 量到节线ON的角ψ称旋进角;由节线ON量到动轴Ox′的角j称自转角。

13.裕度
裕度是指留有一定余地的程度,允许有一定的误差。公差裕度是根据统计的对象和范围来规定的。
14.区域生长分割法
根据区域增长时设置纳入种子点附近的检验点数进行聚类。
15.STL模型
STL模型是以三角形集合来表示物体外轮廓形状的几何模型。 在实际应用中对STL模型数据是有要求的,尤其是在STL模型广泛应用的RP领域,对STL模型数据均需要经过检验才能使用。 这种检验主要包括两方面的内容:STL模型数据的有效性和STL模型封闭性检查。
16.渲染
在电脑绘图中,渲染是指由软件模型生成图像的过程,是CG的最后一道工序,也是最终使图像符合的3D场景的阶段。
17.CAD
CAD全称为管理软件计算机辅助设计(Management Software Computer Aided Design,MS-CAD)是指运用计算机软件在图形化开发界面上进行管理软件的设计,通过设计管理软件的流程结构、数据结构和计算机软件系统的自动数据加载,解析生成能够独立应用的管理软件的过程。
18.RoboDK
RoboDK是通用型机器人仿真软件,支持离线编程软件,使用RoboDK可以更好地调试与规划机器人工作,避免出错。
19.PRM
PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。基于随机采样技术的PRM法可以有效解决高维空间和复杂约束中的路径规划问题。
20.示教器
它是进行机器人手动操纵、程序编写、参数配置以及监控用的手持装置。
21.OMPL
OMPL(The Open Motion Planning Library)是一个基于采样方法的开源机器人运动规划库(基于C++),其内的算法大多是基于RRT和RPM衍生出来的,如RRTStar、RRT-Connect等等。
22.VTK
视觉化工具函式库(VTK,Visualization Toolkit)是一个开放源码 ,跨平台、支持并行处理(VTK曾用于处理大小近乎1个Petabyte的资料,其平台为美国Los Alamos国家实验室所有的具1024个处理器之大型系统)的图形应用函式库。
24.重复精度
重复精度就是在一个确定的测量点位置上,每次被测量的量变化到这个位置时传感器表现出来的测量差值。
25.移轴镜头
移轴镜头是可实现倾角与偏移功能的镜头。

