
- 1安卓 —— 图灵机器人+讯飞语音设计实现_android 科大讯飞语音+图灵机器人
- 2Vuese自动生成vue组件文档
- 3nRF52832——GPIOTE与外部中断
- 410.PostgreSQL锁的处理_pgsql 锁表
- 5Introduction / Getting Started___CH_0
- 6JAVA处理 linux颜色控制符_\u001b
- 7solidity合约中的interface怎么使用_solidity interface
- 8IOS中宏的高级使用_ios宏定义高级用法
- 9前端“油画设计师”——双缓存绘制与油画分层机制
- 10http请求头过大(Request header is too large) 解决方法_safetensors_rust.safetensorerror: error while dese
扫地机器人:ROS-GAZEBO仿真系统与全覆盖规划算法_怎么将全局规划发送给机器人
赞
踩
目录
引言
自己对于扫地机器人一直很感兴趣,也挺想去扫地机器人公司搬砖,奈何自己太菜了没人要,也一直想拥有一款自己的扫地机器人,奈何钱包干瘪,于是我开始着手搭建了一套强大的扫地机器人仿真系统,利用ROS-GAZEBO仿真环境,结合我自己编写的全覆盖规划算法和局部规划算法,成功实现了智能、高效的地图扫描与清理功能。本博客将详细介绍我的系统架构和关键技术
ROS-GAZEBO仿真系统概述
在实现自己的实物之前,我觉得应该把仿真系统先搭建好,上层算法都测试的差不多了,在着手设计机器人硬件, 这个仿真系统,我采用的是基于ros-gazebo, 自己手撸了一个urdf模型,当然你觉得困难你也可以现有的turtlebot,反正都是差速机器人。搭建好urdf后,为了让机器人好看点,我把身体和轮子的Visual标签部分替换成真实的扫地机模型(网上搜的),如下图

系统架构
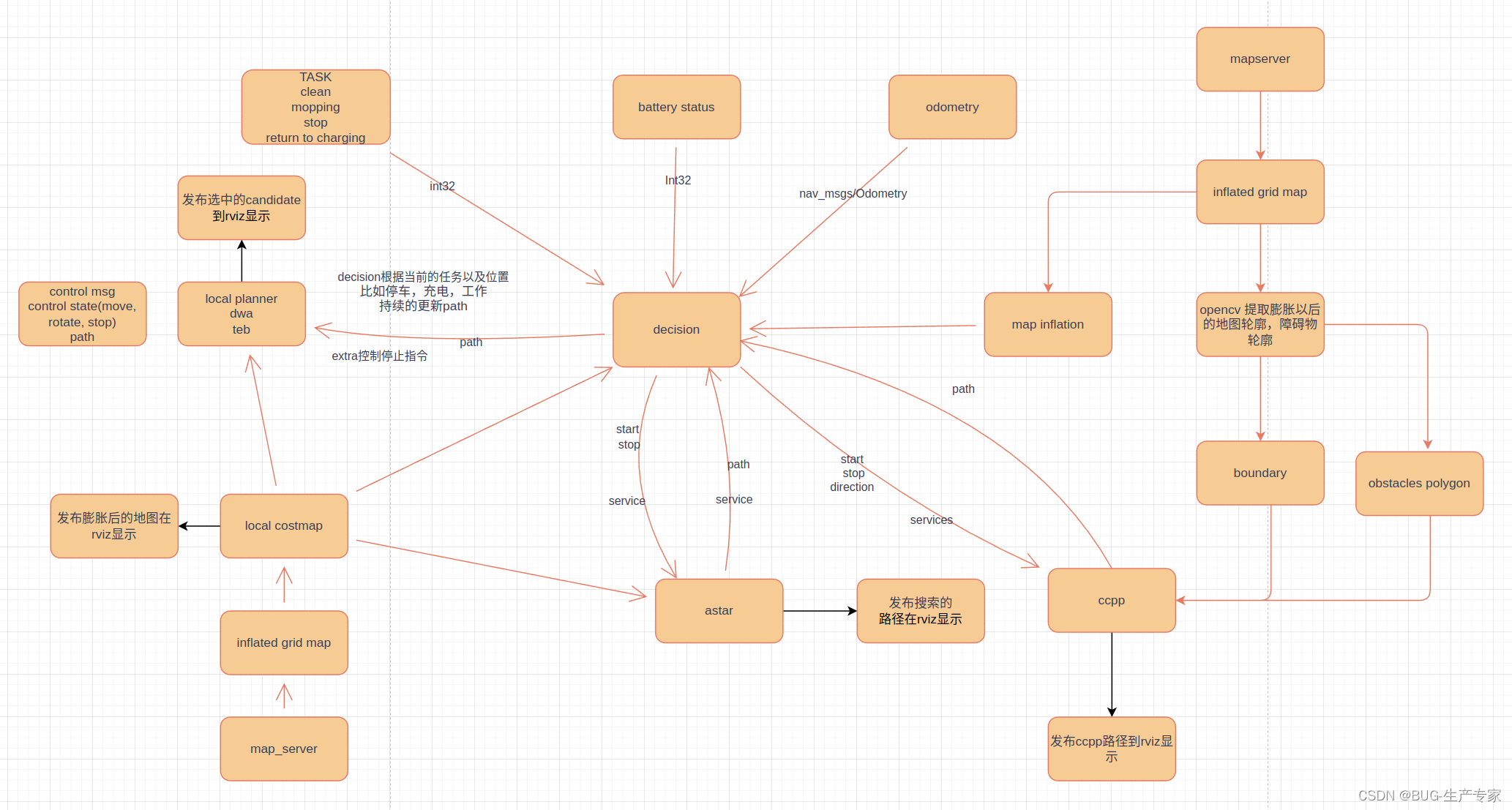
系统的架构参考的是ros的movebase结构图
地图预处理
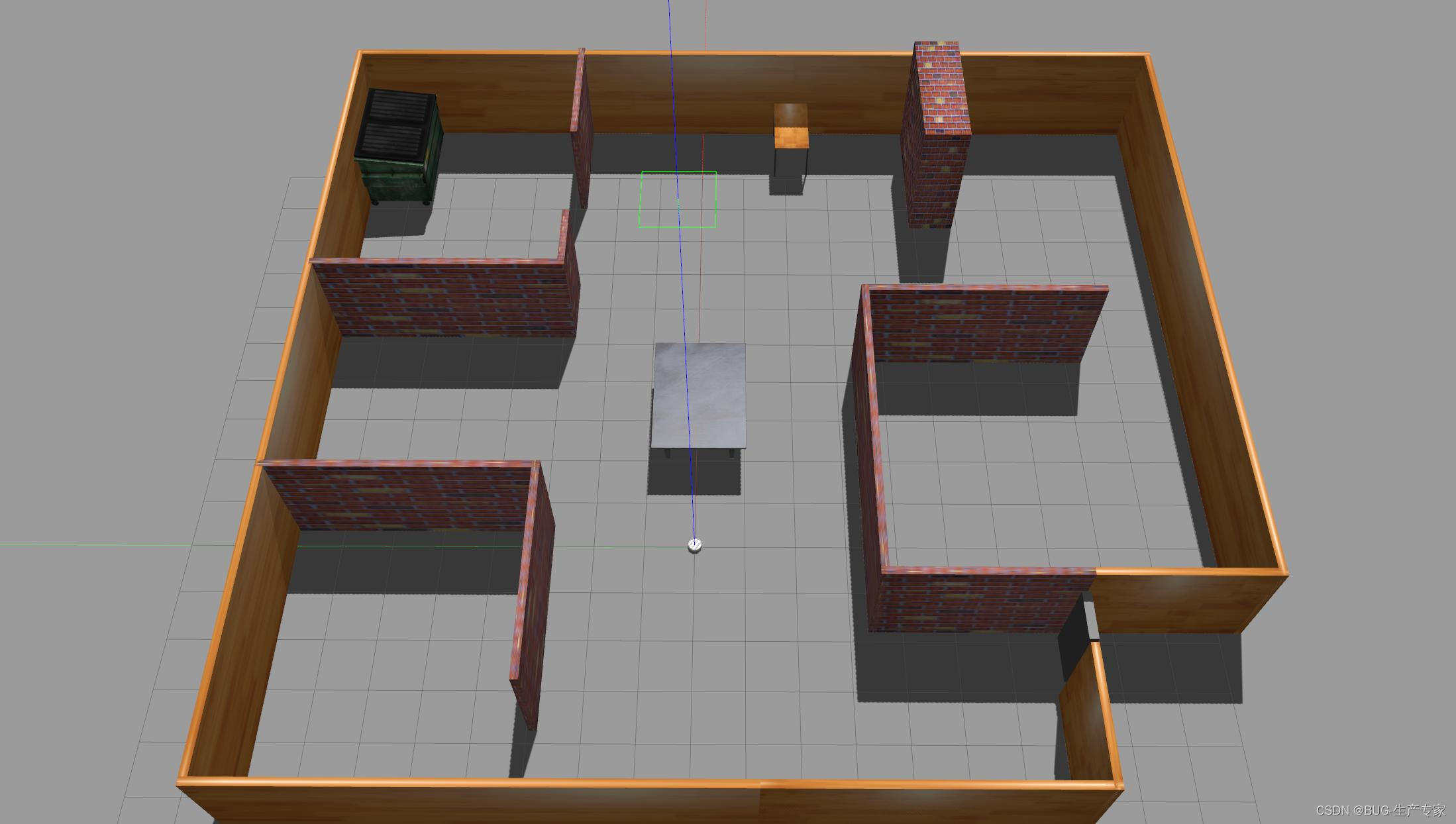
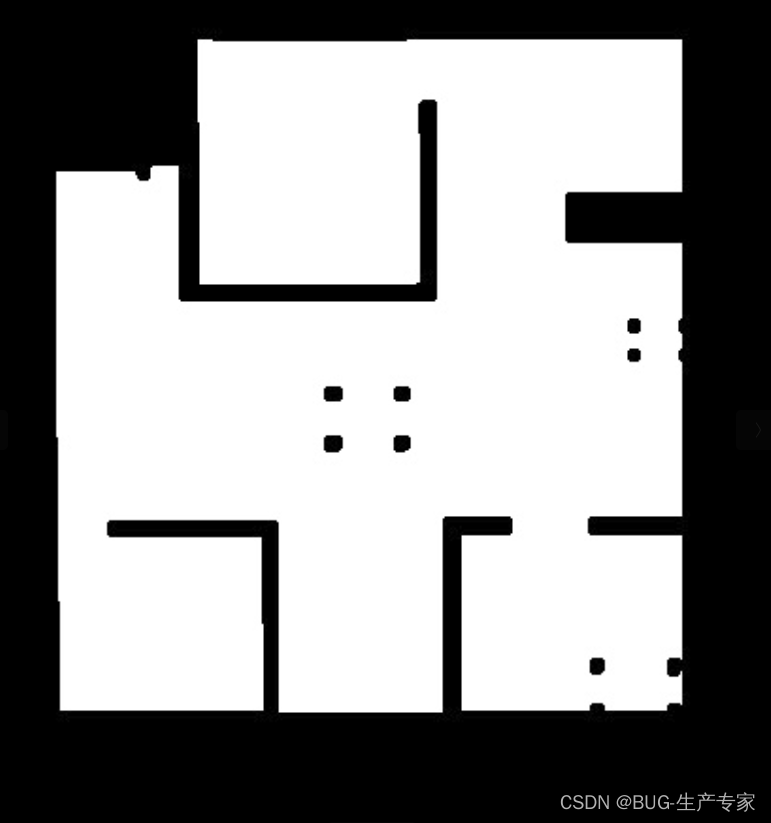
我自己也没有用过扫地机器人,只能根据自己的一些基本需求来去设计算法, 首先应该要有一个家!(真实的家我也买不起,只能在gazebo上自己搭建一个了- -), 其次是可以根据环境进行建图, 这里我直接用的是gmapping功能包, 并且因为目前只是专注于实现整体的框架和算法,我把雷达传感器的误差设置的很小,所以建图效果就看起来不错。因为自己写的全覆盖算法是基于多边形的,所以这里还需要对栅格地图进行预处理,把边界和里面的多边形障碍物给提取出来并转换成多边形点集, 这个预处理部分直接用的是Opencv的开源算法,整体流程是:
1. 读取一个栅格地图,二值化, 去除噪声(我的地图噪声点比较少), 对地图进行按照机器尺寸进行膨胀
2. 对地图进行开运算,闭运算,把连接比较近的障碍物,或者一些噪声点给去除掉
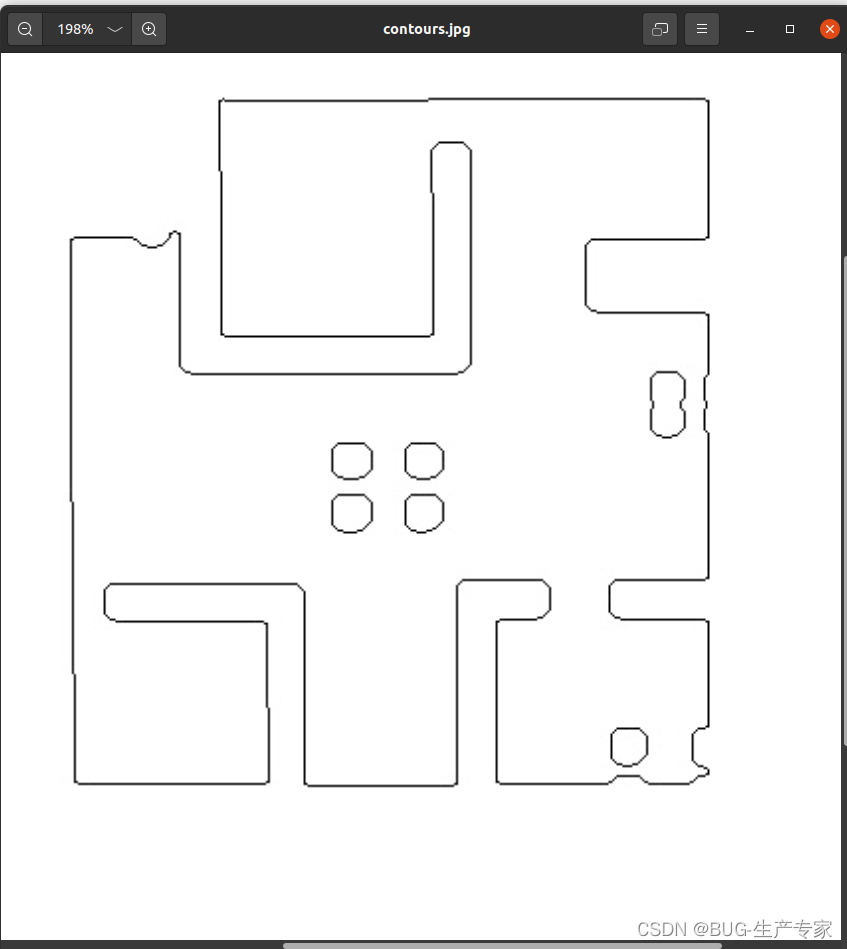
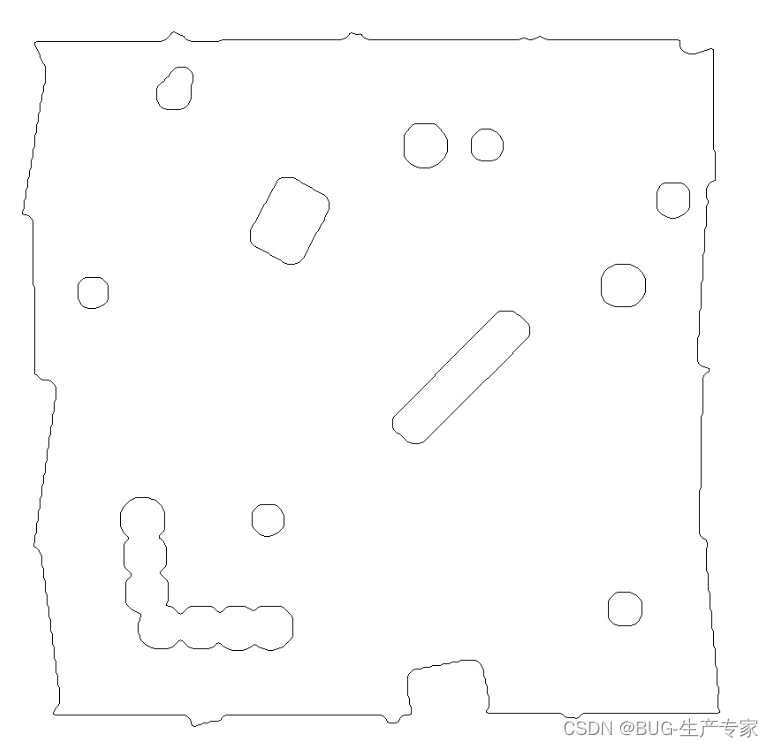
3. 用opencv的findContours找到所有的多边形轮廓
4. 把面积最大的作为外边界,其他的都是障碍物

这里随便贴一些预处理提取轮廓的效果图,效果一般般,但可以提取出来(- -)

全覆盖规划算法
全覆盖规划算法是我系统的主要核心算法之一(只会这个),它使扫地机器人能够高效地清扫整个地图。这个部分的算法可以借鉴我的另外一篇博客,讲述的是室外机器人拖拉机的作业全覆盖,个人觉得扫地机,割草机,拖拉机的全覆盖算法其实都是差不多的,用的同一套核心算法,唯一不同的是掉头区域的处理,还有就是一些细枝末节,比如不可以重复走,不可以倒车,不可踩线之类,其他的不能出界,以及不能发生碰撞是一样的。这个部分算法主要逻辑如下
1. 对多边形分块,这里采用的方法是Cell decomposition,原理就是用一条自下而上的直线段,根据线段和多边形的交点数量变化来触发分块的逻辑, 这个分块方法取决于驾驶方向,目前是自己手动随机选择一个方向(- -有点蠢)
2. 分好块以后,每一个块会有进口和出口,把每一个字块的进和出口做成一张节点图,每一个节点之间的cost可以根据自己的需求计算,最简单就是欧氏距离, 把cost matrix计算好了以后可以用蚁群算法来求解最优的顺序, 这里也可以采用一些开源的tsp算法。
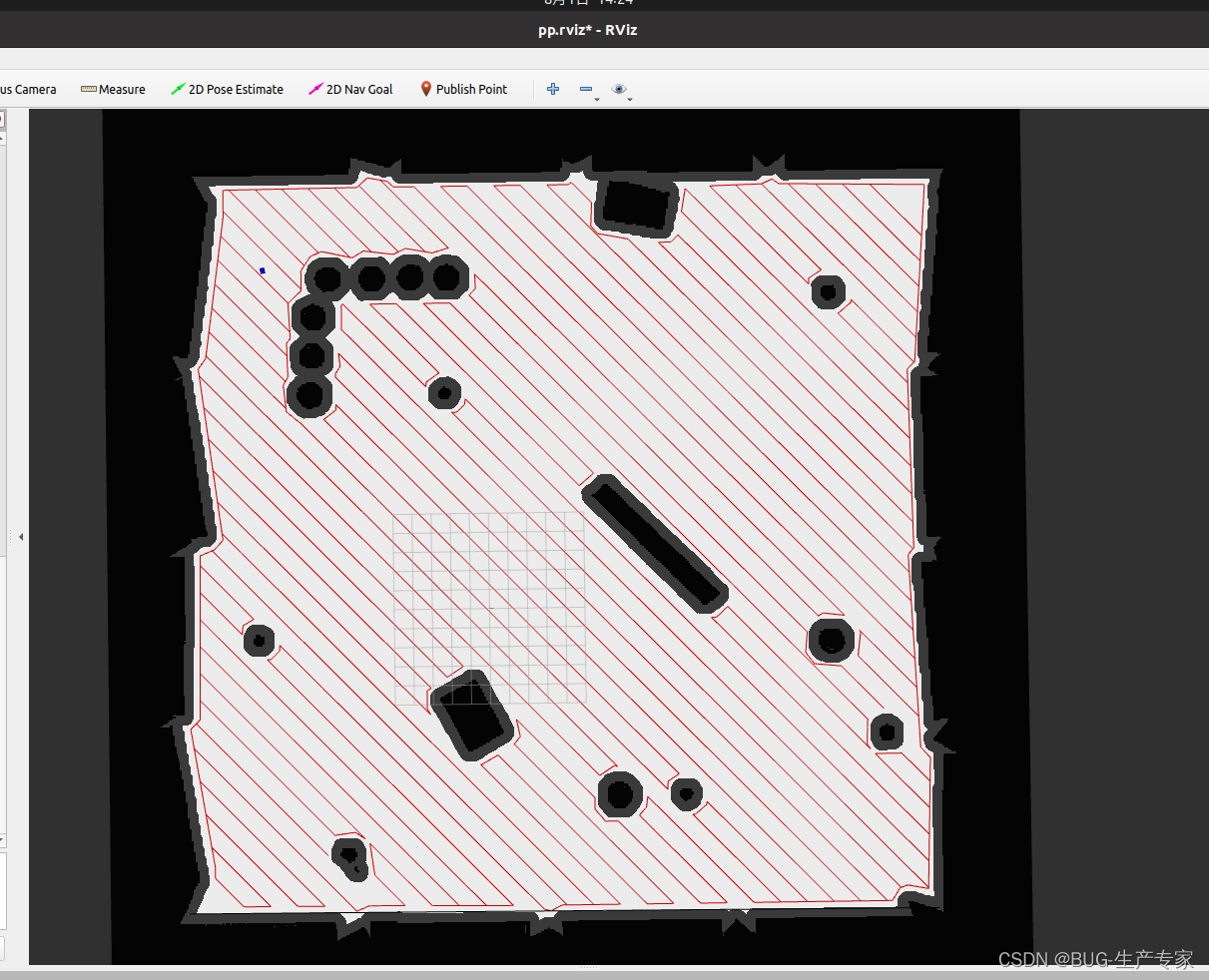
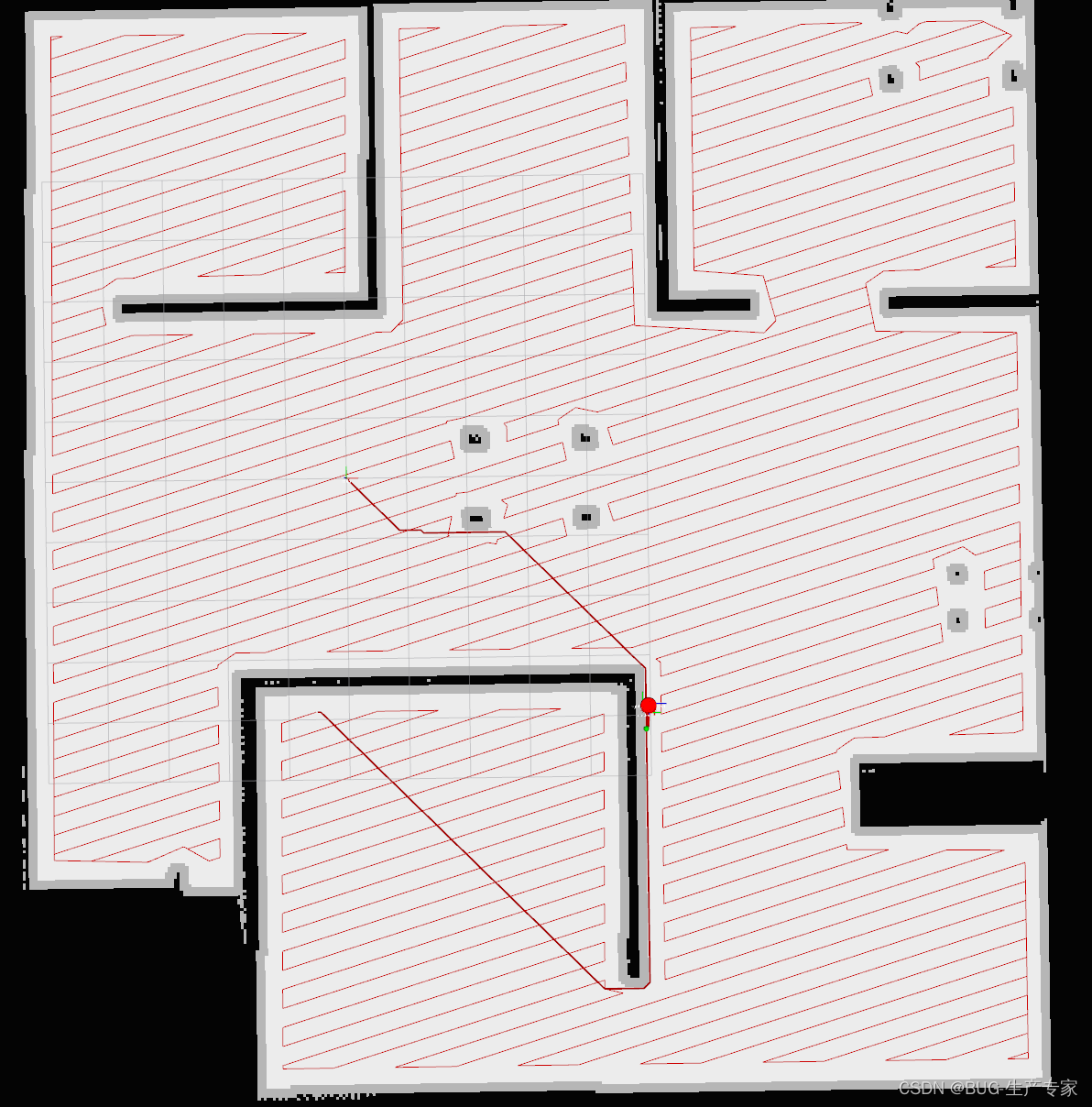
3. 提取蚁群算法的结果,恢复出所有的路线
话不多说,贴效果图
局部规划算法dwa源码 https://github.com/Youhaochan/dwa-algorithm
https://github.com/Youhaochan/dwa-algorithm
路径都有了,当然少不了路径跟踪了是吧,室内扫地机器人或者清洁机器人的局部规划算法应该都是借鉴于ros的dwa算法或者teb算法吧,都有先成的,但是我本人对dwa算法比较了解,我不太了解ros的navigation功能包,不想去学习如何单独适用ros的dwa功能包,我就自己用c++手撸了一个dwa算法, 先撸一个cmake的版本,不依赖于ros的,方便调试,画图用的是matplotcpp, 其中障碍物搜索方面我特地去学习了kd_tree的用法(虽然我的障碍物就几十个,brute search也不影响速度)。这部分也少不了效果图!!
全局规划算法
扫地机器人可能在工作过程,或者在充电桩充电的时候,主人给他发一个指令,让他去定点干活,这个时候就需要根据已有的栅格地图规划处一条点到点的路径了,这部分我使用的是A星算法,这个算法已经非常成熟了,网络上也有很多图和先成算法,不过这部分我还是决定自己手撸,不然总觉得只是局限于理论,而不知道实现细节。
决策
扫地机要能正常工作,肯定少不了一个大脑,也就是决策部分,就像之前说的,我没有从事过相关工作,也没使用过扫地机,因此我就有点头疼该如何写这个决策部分的代码。 这个时候产品经理还是很重要的哈哈哈,我没有自己的产品经理,所以我选择去问chatgpt。gpt给的要求实在是太多了,我只能做到其中一两个,普通的机器人决策部分应该大多数是基于有限状态机来做决策的,也就是根据当前的状态,环境,结合指令做出相应的动作,都是程序员事先写好的逻辑。为了减少工作量,这部分我仅仅实现了,开始清洁,回充,检测电量,停止工作这几个状态。
最终效果
这里直接贴视频了

后续有优化在继续更新!

