
- 1概念解析 | 端边云协同智能计算
- 2牛客选择题练习【二】(20道)(含答案和解析)_c语言socket编程选择题
- 3LangChain + ChatGLM-6B / ChatGLM2-6B 新手踩坑指南!_langchain结合chatglm2
- 4贵州计算机学校排名专科,贵州省2021年计算机学校好点的大专学校
- 5vue+element-ui carousel走马灯一次轮播(显示)5张图片_element-plus 走马灯实现单页多张图片轮播
- 6数字图像处理之matlab大作业:美图秀秀_matlab图像处理系统滤镜怀旧色功能
- 7Windows 环境下,cmake工程导入OpenCV库_opencvconfig.cmake
- 8canvas画圆,canvas圆环进度条效果,vue_vue canvas圆圈
- 9NSFW检测 (色情检测)
- 10数据结构 | 红黑树、平衡二叉树旋转、并查集_左根右,根叶黑,不红红,黑路同
STM32 PWM输出实验_stm32pwm输出实验
赞
踩
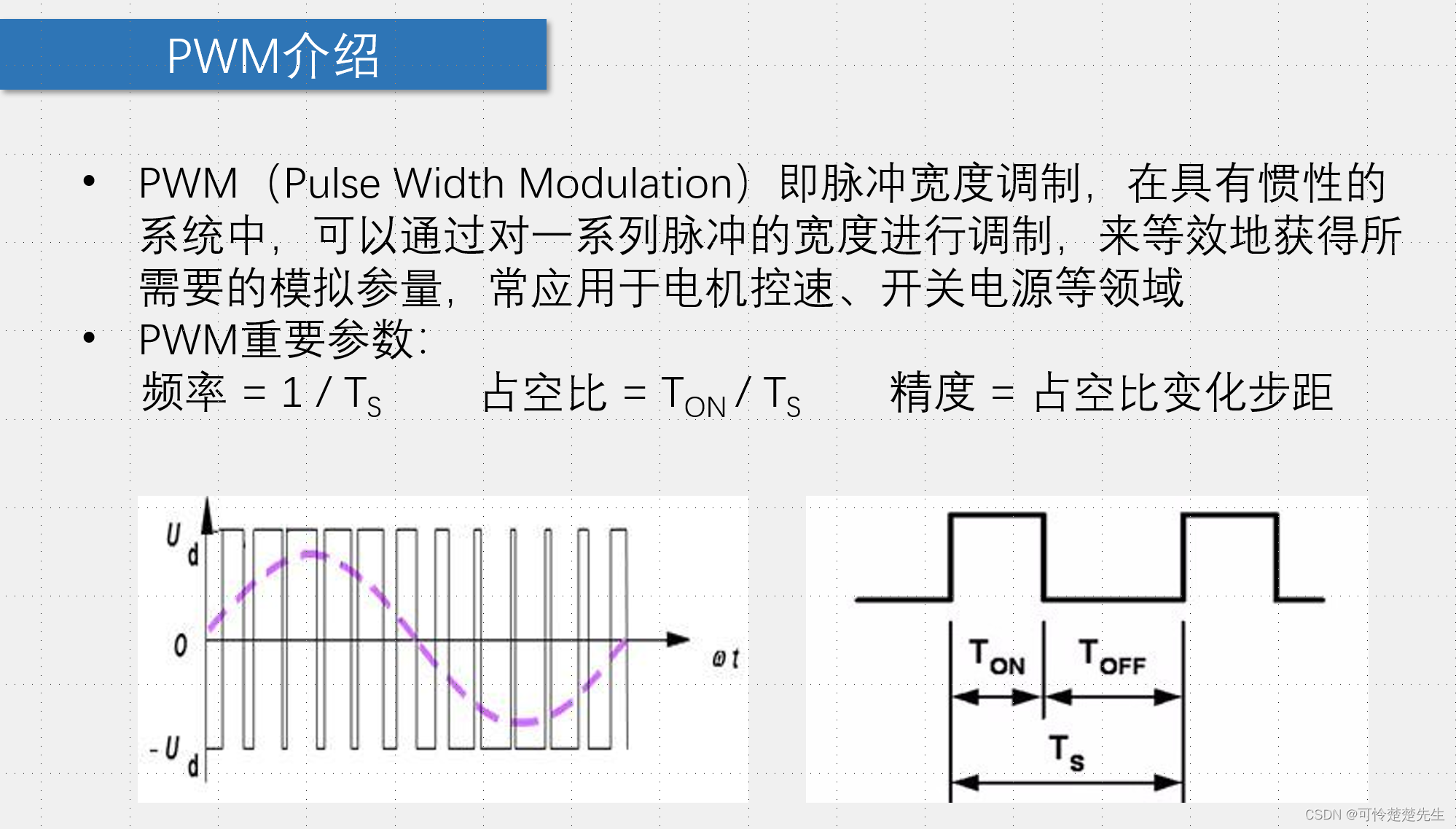
一,简介
1)输出原理
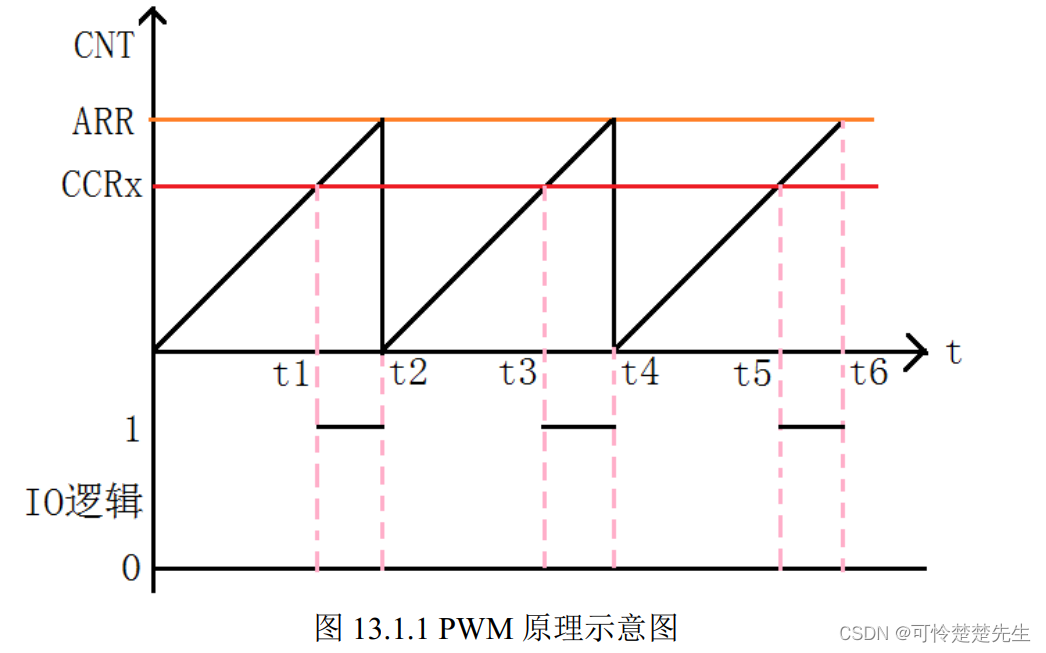
我们假定定时器工作在向上计数PWM 模式,且当 CNT<CCRx 时,输出 0,当 CNT>=CCRx 时输出 1。那么就可以得到如上的PWM 示意图:当 CNT 值小于 CCRx 的时候, IO 输出低电平(0),当 CNT 值大于等于 CCRx 的时候, IO 输出高电平(1),当 CNT 达到 ARR 值的时候,重新归零,然后重新向上计数,依次循环。改变 CCRx 的值,就可以改变 PWM 输出的占空比,改变 ARR 的值,就可以改变 PWM输出的频率。
周期与arr有关。
STM32 的定时器除了 TIM6 和 7。其他的定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4路的 PWM 输出。STM32 最多可以同时产生 30 路 PWM 输出。
2)所需寄存器
除了通用定时器配置所需的寄存器外,还会用到 4 个寄存器(通用定时器则只需要 3 个),来控制 PWM 的输出。这四个寄存器分别是:捕获/比较模式寄存器(TIMx_CCMR1/2)、捕获/比较使能寄存器(TIMx_CCER)、捕获/比较寄存器(TIMx_CCR1~4) 以及刹车和死区寄存(TIMx_BDTR)。
3)工作过程

4)模式
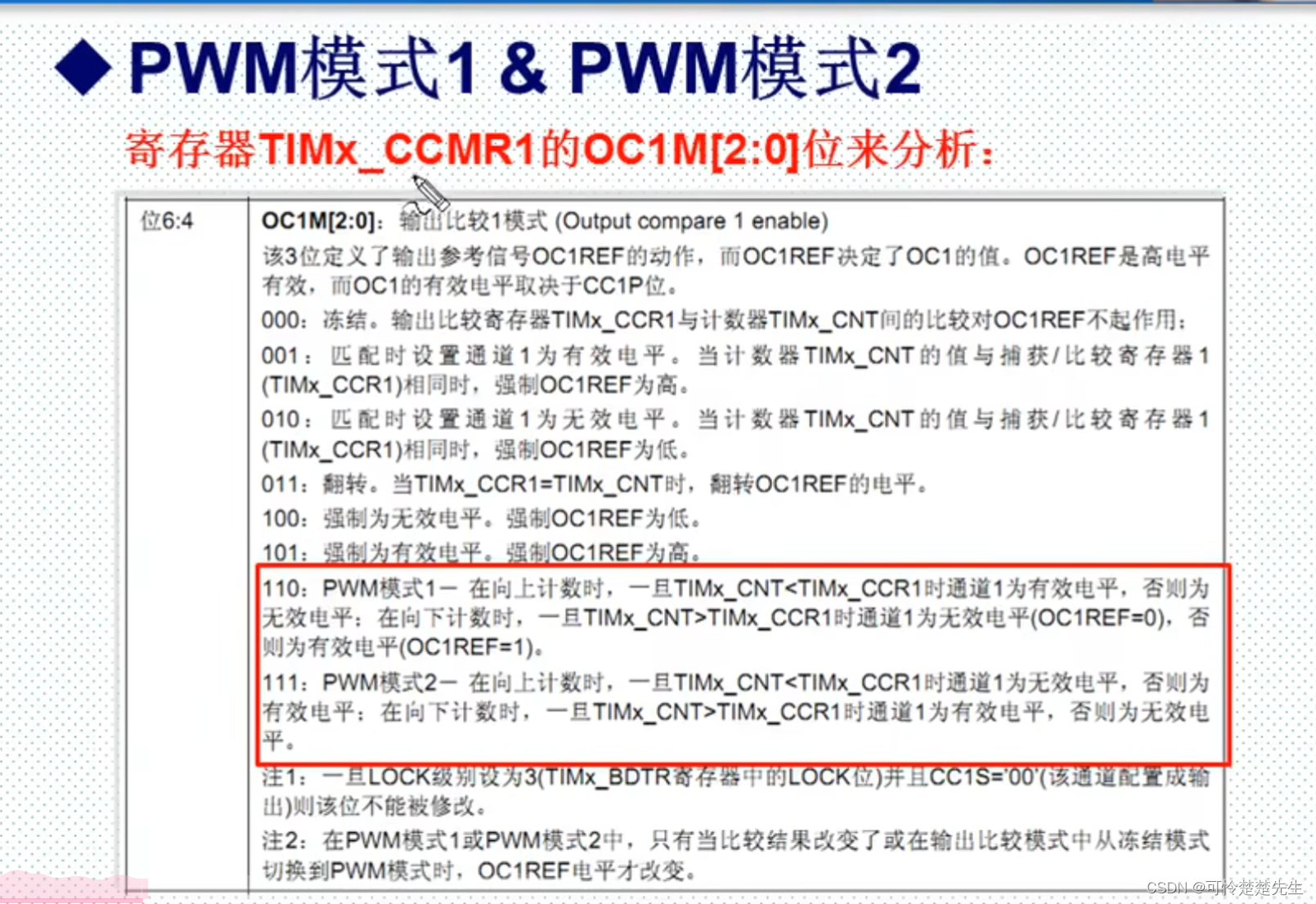
模式1 CNT<CCR X 为有效电平
模式2 CNT>CCR X 为有效电平
有效电平为1 还是 0由CC1P决定极性
二,寄存器以及函数
寄存器
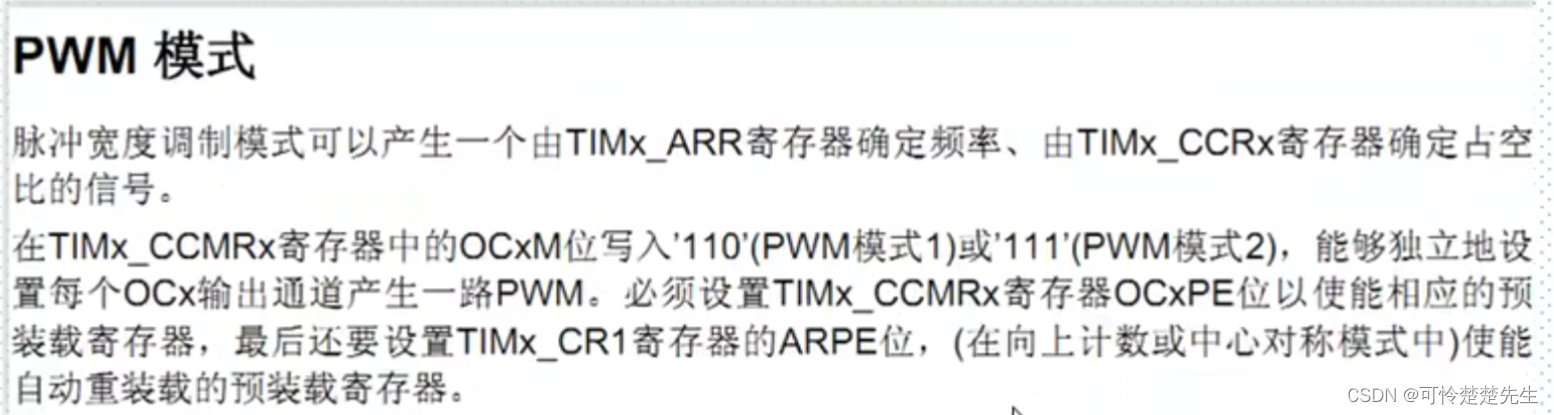
1)TIMx_CCRx寄存器OCxPE位(x为1234)
TIM_OCxPreloadConfig(TIM_TypeDef*TIMx,uint16_t TIM_OCPreload);
例TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
2)ARPE位
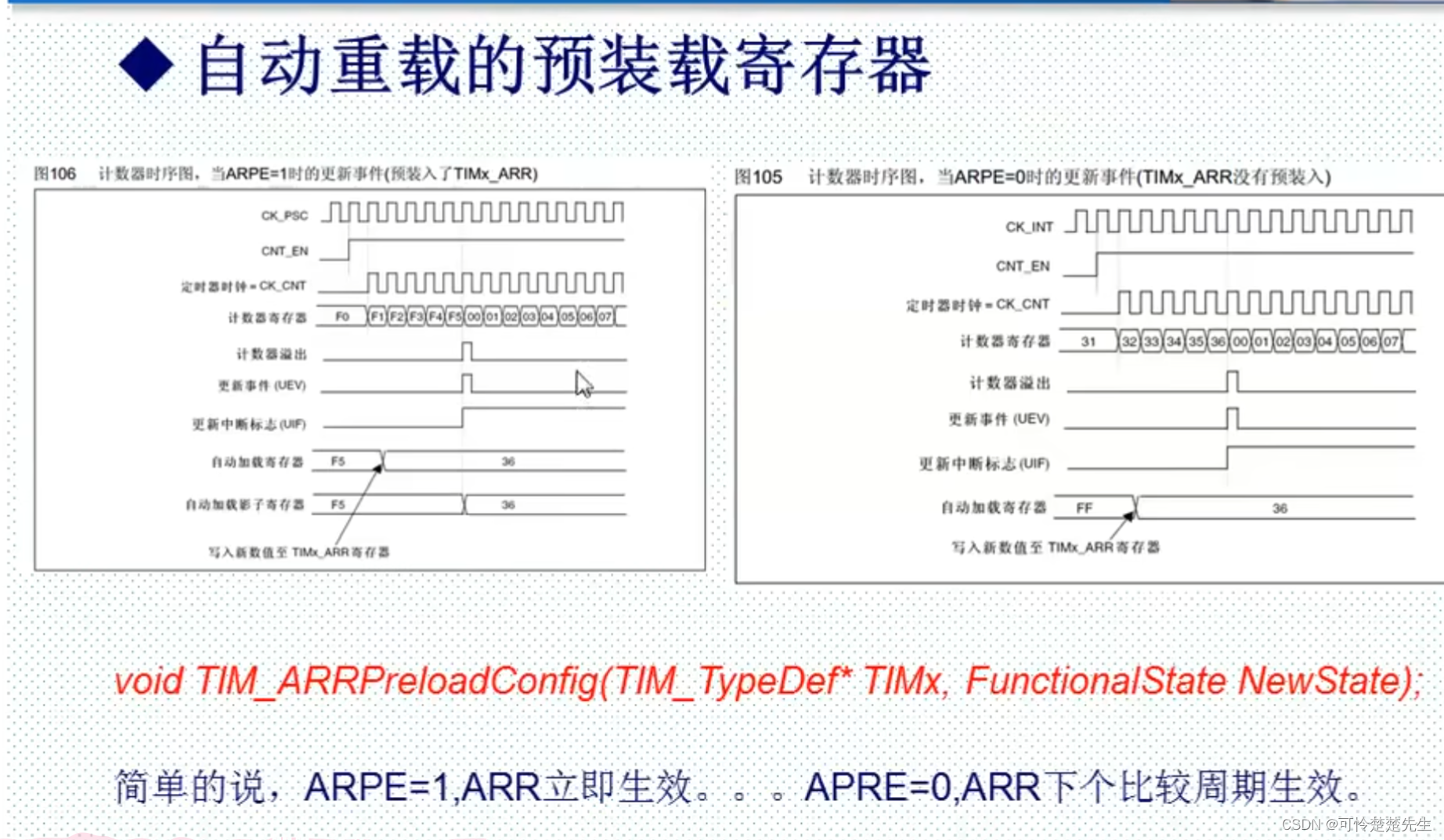
决定 改变ARR 值的改变是本周期瞬时生效还是下一周期更新生效
库函数
1)PWM 模式及通道方向, 使能输出。
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);结构体
- typedef struct
- {
- uint16_t TIM_OCMode; //pwm 模式1或模式2
- uint16_t TIM_OutputState; //输出使能 OR失能
- uint16_t TIM_OutputNState;
- uint16_t TIM_Pulse; //比较值,写CCRx
- uint16_t TIM_OCPolarity; //比较输出极性
- uint16_t TIM_OCNPolarity;
- uint16_t TIM_OCIdleState;
- uint16_t TIM_OCNIdleState;
- } TIM_OCInitTypeDef;
成员变量
参数 TIM_OCMode 设置模式是 PWM 还是输出比较,这里我们是 PWM 模式
参数 TIM_OutputState 用来设置比较输出使能,也就是使能 PWM 输出到端口。
参数 TIM_OCPolarity 用来设置极性是高还是低。
其他的参数 TIM_OutputNState, TIM_OCNPolarity, TIM_OCIdleState 和TIM_OCNIdleState 是高级定时器 TIM1 和 TIM8 才用到的。
例
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择 PWM 模式 2TIM_OCInitStructure.TIM_Pulse=100;//设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //初始化 TIM1 OC1
2)设置比较值函数
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);// 定时器13)使能输出比较预装载
void TIM_OC1PreloadConfig(TIM1_TypeDef*,u16 TIM_OCPreload);//定时器14)使能自动重装载的预装载寄存器允许位ARPE
- TIM_ARRPreloadConfig(TIM_TypeDef*, NewState);
- 例TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
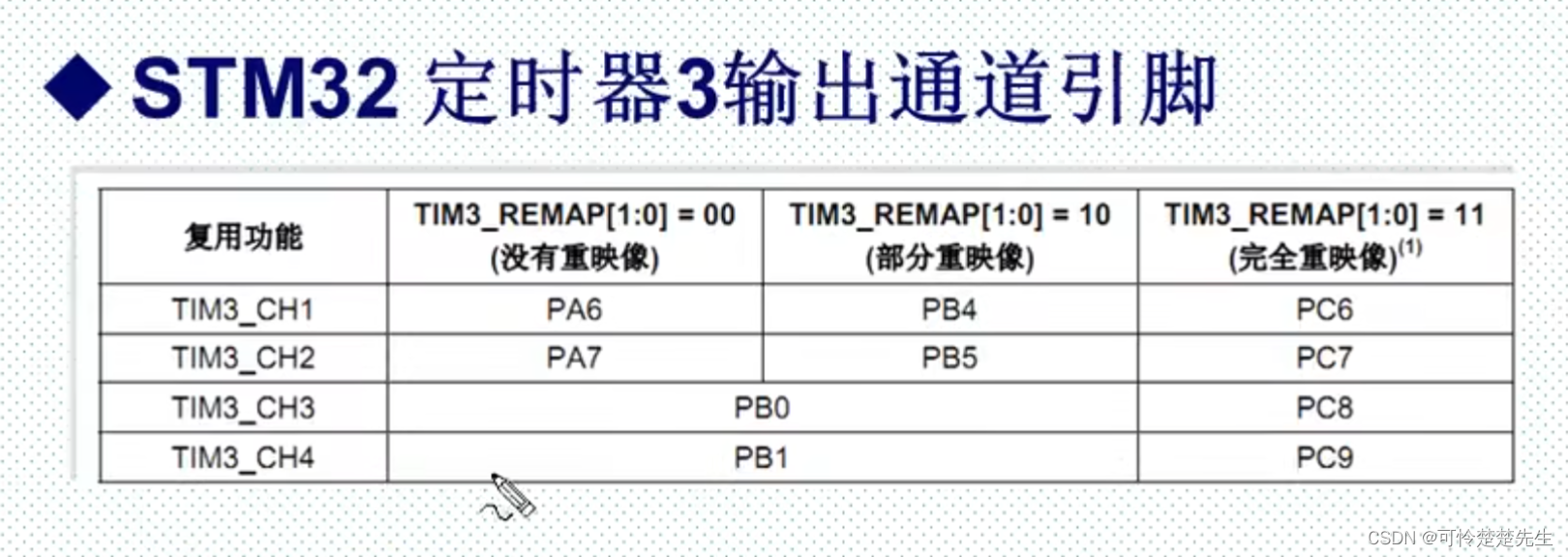
三,通道引脚
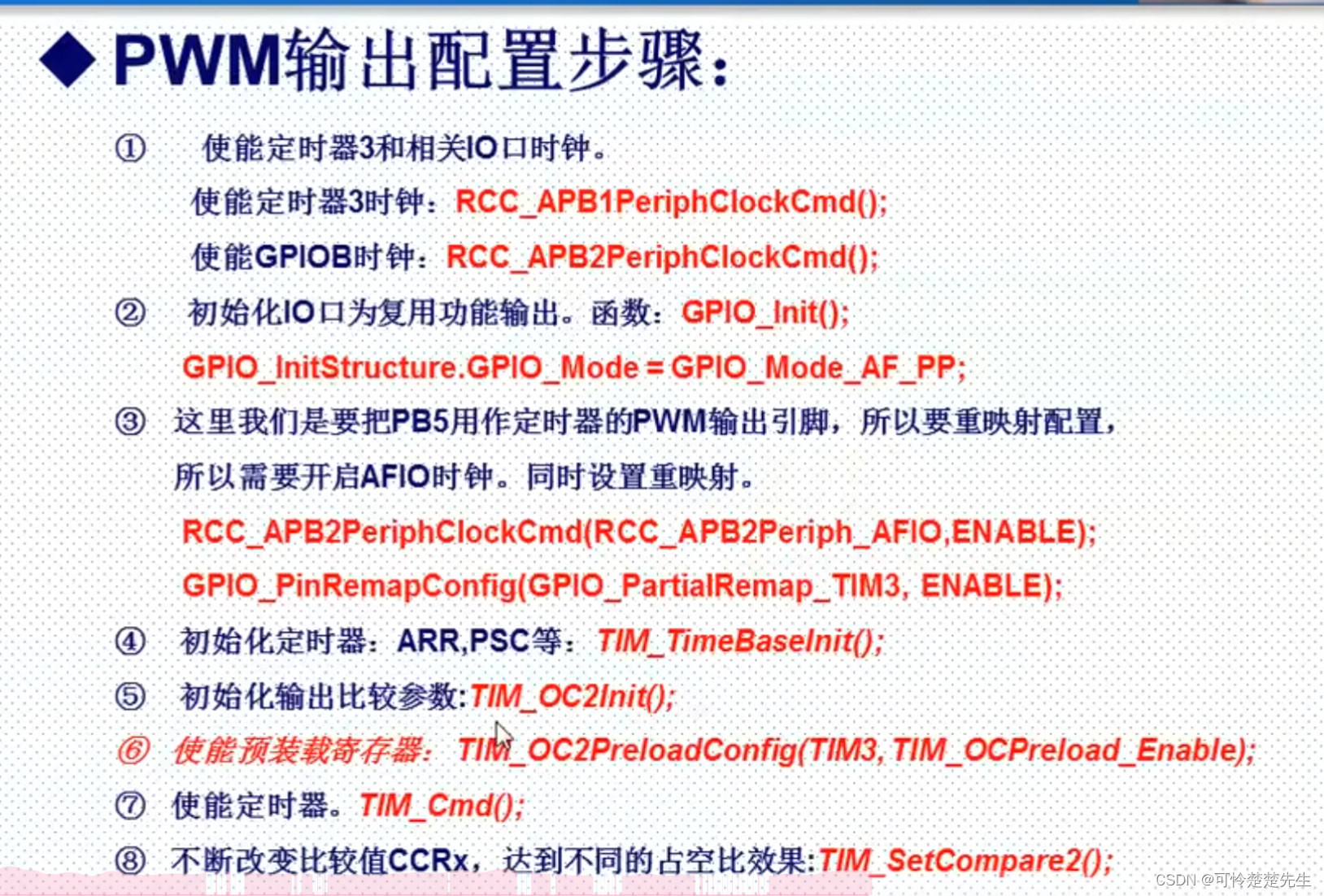
四,步骤
五,软件部分
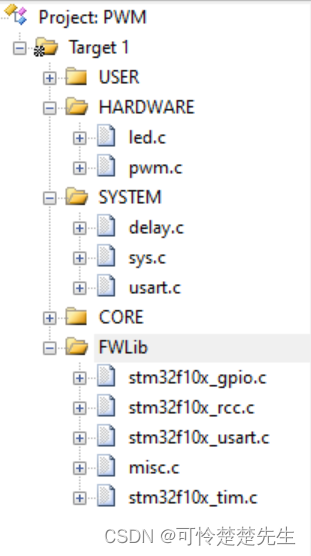
工程
main.c
- #include "led.h"
- #include "delay.h"
- #include "sys.h"
- #include "pwm.h"
- int main(void)
- {
- u16 led0pwmval=0;
- u8 dir=1;
- delay_init(); //延时函数初始化
- LED_Init(); //初始化与LED连接的硬件接口
- TIM1_PWM_Init(899,0);//不分频。PWM频率=72000/(899+1)=80Khz
- while(1)
- {
- delay_ms(10);
- if(dir)led0pwmval++;
- else led0pwmval--;
- if(led0pwmval>300)dir=0;
- if(led0pwmval==0)dir=1;
- TIM_SetCompare1(TIM1,led0pwmval);
- }
- }
-

pwm.c
- #include "pwm.h"
- #include "led.h"
- //arr:自动重装值
- //psc:时钟预分频数
- void TIM1_PWM_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
-
-
- //设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
-
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
-
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
- TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
-
- TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
-
- TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能
-
- TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
-
- TIM_Cmd(TIM1, ENABLE); //使能TIM1
-
-
- }
pwm.H
- #ifndef __PWM_H
- #define __PWM_H
- #include "sys.h"
-
-
-
- void TIM1_PWM_Init(u16 arr,u16 psc);
-
- #endif

