
热门标签
热门文章
- 1ssm139选课排课系统的设计与开发+vue
- 2第三篇:如何精准表达,高效沟通_如何学会高效沟通与表达
- 3AIGC基础通识讲解——图解,小白向_aigc 学习
- 4Sublime Text 崇高文本 ----最性感的编辑器(程序员必备)_sublimetext怎么加图片
- 5图的深度优先遍历和广度优先遍历、最小生成树、最短路径、拓扑排序、关键路径_最小生成树深度优先遍历
- 6企业资产|企业资产管理系统|基于springboot企业资产管理系统设计与实现(源码+数据库+文档)_搭建一个资产管理系统
- 7大数据各组件安装(数据中台搭建)_大数据安装包
- 8Android Automotive架构与流程:VehicleHAL,CarService
- 9【内存泄漏Bug】registerReceiver Are you missing a call to unregisterReceiver()异常分析及解决
- 10L1-080 乘法口诀数列 (20 分)_l1-080 乘法口诀数列 分数 20 作者 陈越 单位 浙江大学 本题要求你从任意给定的两
当前位置: article > 正文
PX4硬件在环仿真_在环仿真时,px4和qgc、mavros连接失败,是什么原因?
作者:知新_RL | 2024-05-30 16:15:04
赞
踩
在环仿真时,px4和qgc、mavros连接失败,是什么原因?
- 准备px4fmu-v4固件的飞控
cd Firmware
make px4_fmu-v4 upload
//make list_config_targets查询可支持的板子 - Windows下打开QGC地面站,飞控板连接电脑。“Vehicle Setup”——“Airframe”,选择“Simulation(Copter) /HIL Quadcopter X”,点击“Save and restart”,不用拔飞控板,等待地面站自动重新连接飞控板。
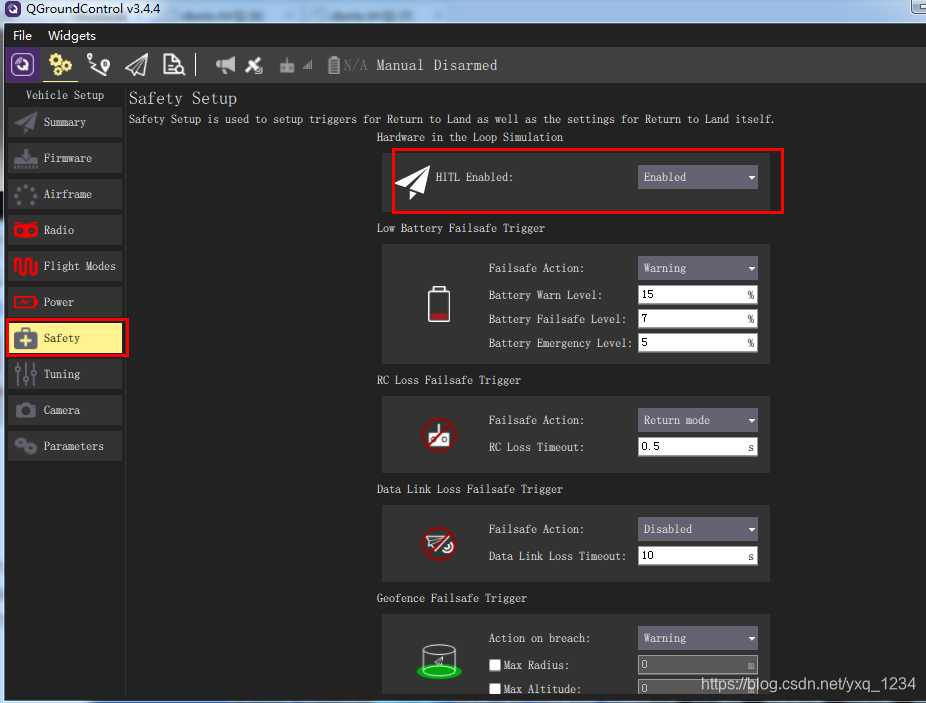
- 设置HTL为enable。
- 拔掉飞控,关闭地面站。
- 进入虚拟机
cd Firmware/Tools
./jmavsim_run.sh -q -d /dev/ttyACM0 -b 921600 -r 250
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

