
- 1windows下open webui+ollama+sd webui_ollama langchain web-openui windows
- 2yolov8_track追踪加分割(yolo目标检测+追踪+分割)_yolov8 track
- 3LangChain核心模块——Agents_tavily
- 4ADOP带你了解:超越传统:智算中心网络如何推动AI的极限_智算中心的业务网络、数据网络、存储网络
- 5只需三步,手把手带你在本地部署运行大模型_docker run -d -p 3000:8080 --add-host=host.docker.
- 6数据仓库中的数据治理流程
- 7hive详解(二)
- 82022 robocom 世界机器人开发者大赛-本科组(国赛)
- 9c语言之函数调用约定
- 10Java —— 线程
颠覆传统:机器人与AI大模型的结合,开启智能自动化的黄金时代!_机器人应用大模型技术
赞
踩

引言:机器人技术与大模型的结合趋势
随着科技的迅速发展,机器人技术与大模型的结合已经成为必然趋势。这种结合不仅仅是技术的简单叠加,而是一种深层次的互补与融合,为机器人技术的应用开辟了新的可能性。大模型,能够处理和分析海量的数据,提供更为精准的决策支持。当这些能力与机器人的物理执行功能结合时,可以极大地扩展机器人在复杂环境下的应用范围,提升其自主性和适应性。这种趋势不仅推动了工业自动化的进程,也为服务机器人的智能化升级提供了强有力的技术支持,预示着未来机器人技术在多个行业的广泛应用。
什么是任务级交互
任务级交互是一个机器人领域的术语,其重要性体现在机器人执行复杂任务的能力上。在定义上,任务级交互指的是机器人能够从接收具体任务指令到完成具体动作的全过程中的自主操作。这一过程涵盖了任务理解、任务分解、程序生成以及任务执行等多个环节,而且通常需要极少或没有人类的干预。
模拟一个场景,机器人被要求到厨房取一杯水。在任务级交互的框架下,机器人首先需要理解“取一杯水”的任务意图,然后将这个任务细化成一系列具体的动作,如走到厨房、找到杯子、打开水龙头、装满水等。接着,机器人需要自行生成控制代码,通过其执行系统完成这些动作,最终达到拿到一杯水的目标。

这种交互模式显著提高了机器人的操作效率和适用范围,因为它减少了人类操作者的介入,使得机器人能够在更广泛的环境和情境下独立作业。在商业和工业领域,这样的技术能大幅提高生产效率和灵活性,特别是在高风险或人力资源成本高的操作中,机器人可以提供安全且经济的解决方案。
任务级交互的难点
任务级交互在机器人领域的实现面临多种技术和实践挑战。首先,现有的机器人控制系统通常采用层级控制方法,如任务级、动作级和关节级等不同层级。这种方法虽然在一定程度上能够实现简单的任务执行,但在面对更复杂、多变的实际环境时,机器人的自主性和适应性还远远不够。
一个重要的技术挑战是如何使机器人在没有人类详细指导的情况下,理解并执行任务。目前的机器人系统往往缺乏足够的通识理解能力,需要工程师进行大量的任务拆解和编程工作。同样的接水任务时,仅仅是理解并操作不同类型的水龙头,就需要工程师预设大量的参数和动作序列。这不仅增加了机器人系统的复杂性,也极大限制了机器人的灵活应用。
技术上的另一个难点是确保机器人生成的任务动作在新环境和新情境中的安全性和适应性。机器人在实际操作中可能会遇到未预见的物理环境变化,如何让机器人在不同情况下都能安全有效地执行任务是一个巨大的挑战。如机器人在操作蒸箱烤箱等高温设备时,必须能够识别并适应周围是否有人以及如何安全地处理高温蒸汽的释放。
除了技术挑战外,实践中还面临数据和训练问题。高质量的训练数据在机器人领域尤为稀缺,而数据的收集和处理通常成本高昂且效率低下。机器人的训练不仅需要大量的物理交互数据,还要确保这些数据能够覆盖足够的场景和变化,这对数据集的广度和深度提出了很高要求。
在克服这些挑战方面,虽然技术正在进步,如通过仿真技术来获取训练数据,或者使用多模态大模型来增强机器人的任务理解能力,但这些方法仍在初步探索阶段,且往往需要结合人类工程师的经验和校正。这些因素共同作用,使得任务级交互的实现变得异常复杂和困难。
大模型的引入和意义
大模型,特别是大参数级语言模型在机器人任务级交互中发挥着关键作用。这些模型不仅包含大量的参数和高计算资源需求,而且还能够处理复杂的任务并取得卓越的性能。在机器人应用中,大模型的引入将显著提高了任务处理的效率和效果,从而为机器人技术带来了质的飞跃。
大模型在自然语言处理领域的应用显著提升了机器人的理解和交互能力,使其能够自动解析复杂任务并生成控制代码,减少了对人工编程的依赖,从而加快机器人对新任务的适应和执行速度。此外,其零样本和少样本学习能力使机器人能够在缺乏大量特定数据的情况下迅速适应新环境和任务,适用于频繁变化的场景如商业服务和工业生产线,提高了系统的灵活性和应用范围。大模型赋予机器人强大的通识理解能力,使其能在酒店服务、高级制造、医疗辅助等多个领域独立工作,极大扩展了机器人的应用领域和自主性。
因此,大模型的引入不仅提高了机器人执行任务的效率和质量,还是其从专用设备向广泛应用潜力的智能系统转变的重要步骤,标志着机器人技术向更高级别的自动化和智能化迈进。
通过在任务级交互中引入大模型,可以提升机器人处理复杂任务的能力。大模型利用其优秀的自然语言处理能力,可以增强机器人对复杂指令和语境的理解。例如,可以帮助机器人精准解析客人的个性化饮料需求及其制作步骤,能够基于现有信息生成优化的行动计划和策略,提升任务规划和决策效率。在仓库管理等应用场景中,这意味着机器人可以自动优化物品的存取路径和存储布局。
此外,大模型的模式识别和预测能力使机器人更好地适应新环境和应对突发变化,如在不熟悉的制造环境中识别新工具和适应新流程。在多机器人系统中,大模型还可以促进机器人之间的高效协作,指导它们如何协调动作,完成如建筑工程等复杂任务。
通过增强机器人的错误处理和自我修正能力,如果在任务执行中发生错误,大模型可帮助机器人分析原因并调整策略以防止同类错误的重复,从而提高整体操作的可靠性。通过这些技术的整合,机器人的操作不仅变得更智能和高效,也能更广泛地应用于各种复杂和多变的环境中。
当前的研究进展
SmartLLM
SMART-LLM是一个专为多机器人系统的任务规划而设计的创新框架,它巧妙地利用了大模型(LLMs)的能力。这个框架的核心目标是将人类给出的高层次任务指令转换成详细的多机器人执行计划。通过这种方式,SMART-LLM能够提高机器人执行复杂任务的效率和准确性,尤其是在多个机器人协作的场景适用。
SMART-LLM的工作流程包括四个主要阶段:任务分解、联盟形成、任务分配和任务执行。在任务分解阶段,系统首先将一个复杂的任务指令分解成多个更小的、可以管理的子任务。这一过程中,LLM的作用是解析任务指令的含义,并确定如何有效地将其拆分。接下来,在联盟形成阶段,根据每个子任务的需求和每个机器人的能力,形成一个或多个机器人的团队。这一阶段是确保每个子任务都能被指派给最合适的机器人或团队来完成。
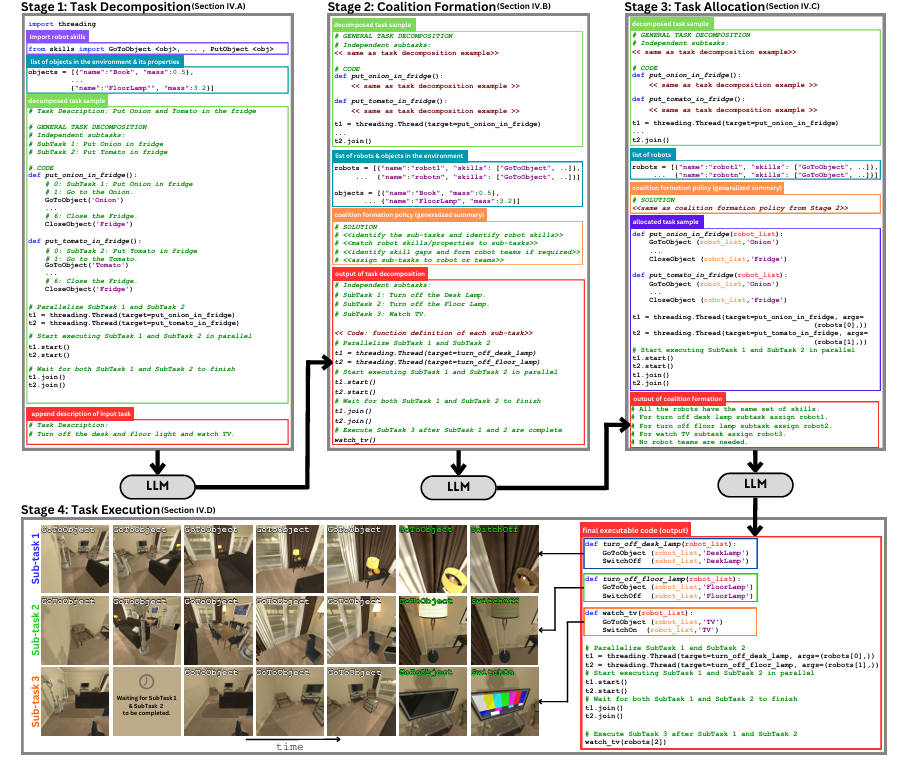
任务分配阶段则涉及具体的执行计划,其中包括将每个子任务明确分配给特定的机器人或机器人团队。这一过程需要精确的协调和高效的资源分配,确保所有的机器人都能在正确的时间执行相应的任务。最后,在任务执行阶段,机器人根据分配到的任务开始实际的操作。这一阶段的成功执行依赖于前面几个阶段的精确规划和准备。
为了验证SMART-LLM的效果,该框架在模拟环境和实际环境中都进行了广泛的测试。这些测试不仅展示了该模型在生成多机器人任务计划方面的能力,还证明了它在实际应用中的实用性和可靠性。研究团队为此创建了一个专门的基准数据集,用以评估不同复杂程度的任务在多机器人系统中的规划效果。
此外,SMART-LLM的实现代码、实验视频和数据集都已公开,供全球研究者和工程师使用和参考。这些资源的公开旨在推动多机器人系统研究的进一步发展,帮助科学界和工业界更好地理解和利用LLMs在机器人任务规划中的潜力。
MLDT
这是一篇来自东南大学和之江实验室的一篇研究论文,文中详细论述了使用开源大模型进行复杂长时间范围机器人任务规划。本文提出了一种创新的任务规划方法,即MLDT(多层分解任务规划方法Multi-Level Decomposition Task Planning),旨在解决当前机器人任务规划方法在处理复杂和长期任务时遇到的挑战。该方法通过在目标级、任务级和行动级三个层面上分解任务,以简化问题并提高规划效率。
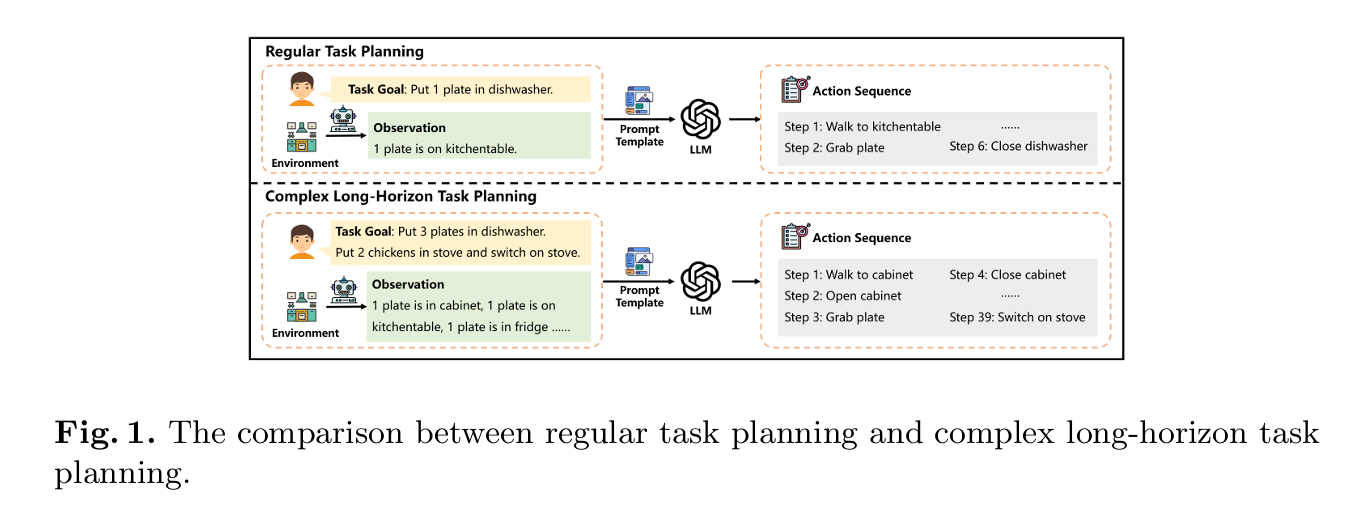
在目标级分解中,主要任务被分解为多个子目标。每个子目标定义了需要达成的具体目标,这一步骤有助于清晰地界定任务的范围和目的。例如,如果主任务是“准备晚餐”,那么子目标可能包括“烹饪主菜”和“准备饮料”。
接下来,在任务级分解阶段,每个子目标进一步细化为具体的子任务。这些子任务描述了实现子目标所需的具体步骤,每个步骤都涉及具体的行动和决策。例如,子目标“烹饪主菜”可以分解为“切割食材”、“调配调料”和“烹饪食物”。
在行动级分解中,每个子任务被转化为一系列具体的行动序列。这一层的分解使得大模型能够生成详细的、步骤明确的行动计划以完成每个子任务。例如子任务“切割食材”可能包括“拿起刀具”、“切割蔬菜”和“清洗食材”。
为了提升开源大模型在任务规划方面的性能,研究者们引入了目标敏感的语料生成方法,该方法基于环境反馈生成高质量的训练数据。此外还进行了指令调整,通过精细调整模型以更好地适应任务规划需求。研究者们还构建了一个更具挑战性的数据集——LongTasks,用于专门评估复杂长时间任务的规划能力。
实验结果表明,MLDT方法在多个数据集上的性能显著优于现有基于开源大模型的任务规划方法。特别是在LongTasks数据集上,该方法的成功率提高了超过50%,有效地证明了其在处理复杂长期任务中的实用性和高效性。
综上所述,MLDT方法通过多层次分解任务,显著简化了任务规划的复杂性,使得开源大模型能够更有效地应用于实际的机器人任务规划中。该方法不仅克服了现有方法的限制,还为复杂的真实世界场景中的任务规划提供了一种切实可行的解决方案。
DELTA
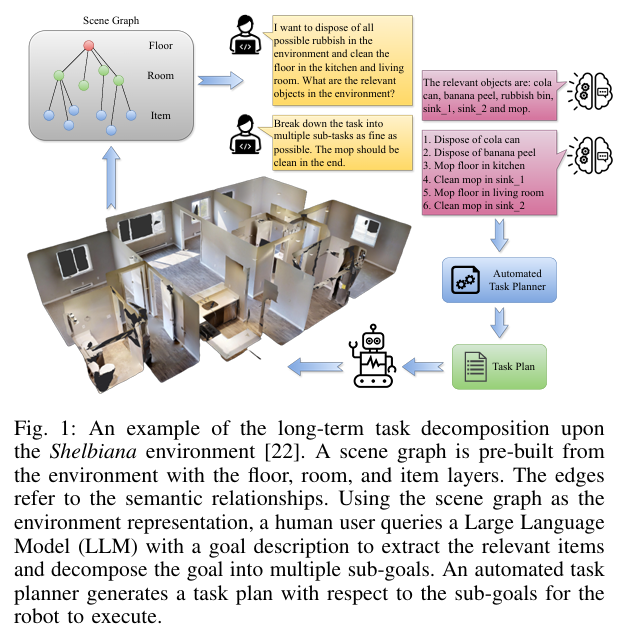
DELTA系统(Decomposed Efficient Long-Term Robot Task Planning using Large Language Models)代表了机器人任务规划领域的又一个重要突破。该系统利用大模型与环境数据结合的方式,通过场景图来优化机器人对环境的理解和任务规划的效率。DELTA的核心方法是将环境数据结构化为场景图,这种图形表示法不仅包含了物理空间的信息,还融入了环境的语义信息,使机器人能更好地理解其操作环境。
实现DELTA系统涉及几个关键步骤:首先是域生成,在这一阶段,系统使用大模型根据自然语言提示生成形式化的计划语言(如PDDL)的域描述。接下来是场景图剪裁,在这一步骤中,系统剪裁场景图,移除与当前任务无关的元素,从而降低问题的复杂性。然后进行问题生成,系统根据剪裁后的场景图和初始自然语言提示,利用大模型创建详细的问题规格。此后是目标分解,DELTA将复杂的长期目标分解为一系列更简单的子目标,使得任务规划更为可管理。最后是自回归子任务规划,系统顺序规划每一个子目标,确保任务能够顺利、连续地执行。
DELTA系统的实施取得了显著的成就。与现有的机器人任务规划方法相比,DELTA在多个关键性能指标上展现了优势。首先,得益于其能够通过场景图精确地理解环境并有效地将复杂任务分解为更简单的子任务,DELTA在任务规划成功率方面展现了更高的成功率。其次,DELTA通过分解任务和有效管理任务执行顺序,显著缩短了总体规划时间,在优化规划时间方面也取得了突破。此外,DELTA通过结构化方法剪裁场景图和分解目标,提高了计算效率,减轻了规划系统的负载,降低了潜在的错误率。
总之,DELTA利用大模型的强大能力处理复杂的规划问题,在机器人任务规划的效率和有效性上都显示出显著的提升。未来,这种新颖的规划方法有望在真实世界的机器人操作中得到广泛应用,特别是在动态环境中的应用将是其进一步发展的重要方向。
现有研究的局限性
尽管大模型在机器人领域展现出巨大潜力,但在目前的研究和应用中仍存在一些技术和实践限制。首先,大模型需要庞大的数据集进行训练,这在机器人领域可能难以实现,因为高质量的机器人交互数据难以获取,且成本高昂。此外,大模型的训练和维护需要显著的计算资源,这可能限制了它们在资源受限的实际应用环境中的使用。
技术层面,尽管大模型具有强大的理解和预测能力,它们在处理高度动态和未知环境中的复杂任务时仍可能面临挑战。这是因为大模型在训练时可能未能涵盖所有可能的环境变量和操作情景。此外,大模型在实际部署时的泛化能力和适应性还有待进一步验证和提升。
从未来影响来看,大模型有潜力彻底改变机器人技术的面貌。它们能够提升机器人的自主性,使机器人能够执行更复杂的任务并在更广泛的应用场景中独立操作。同时,随着技术的进步,我们可能会看到更多专为机器人设计的优化大模型,这些模型将更好地适应机器人特定的操作需求和环境限制。
总结与引用
大模型的引入为机器人任务级交互带来了前所未有的机会和挑战。通过增强机器人的理解能力和决策质量,大模型已经开始在多个领域展现其改变游戏规则的潜力。然而,要充分利用这些模型的能力,还需要克服存在的数据、计算资源和技术适应性方面的限制。未来,随着大模型技术的不断进步和机器人应用需求的进一步明晰,我们预期会看到更多创新的解决方案,这些解决方案将使机器人技术更加智能化和自动化,从而在更广泛的实际应用中展现其价值。
资料获取,更多粉丝福利,关注下方公众号获取


