
- 1组装一台FPV穿越机无人机,小白级保姆教程!_fpv组装
- 2uni-app APP里的toast字体放大_uni.$u.toast
- 3PCIe网卡驱动实现分析(一)--- PCIe基础知识_pcie 通过驱动 通信
- 4Github Desktop安装和使用说明、项目代码版本控制_githubdesk 自带git吗
- 5ARM核的七种工作模式和七种异常_abort模式触发
- 6数字分析面经(各个地方搜集过来的)_数字马力sql题
- 7凝思系统安装及初始化配置
- 8LlamaFactory可视化微调大模型 - 参数详解_llama模型自定义参数
- 9手把手教你用Python打造一个语音合成系统_python 语音合成
- 10普通人如何用AI帮你干活——娱乐1_普通人如何使用ai
学习周报:文献阅读+Fluent案例+水力学理论学习_fluent 明渠
赞
踩
目录
实验一:采用二维Taylor衰减涡的理论解来验证不同方法之间的压力重建性能
摘要
在本周中,通过阅读文献,了解到PINN在重建压力场中的作用,文献中使用传统方法与PINN构建压力场进行对比,呈现出PINN在构建压力场中的优劣势。Fluent中,选用明渠波浪边界仿真的案例,进行几何划分和设置求解。理论学习方面,对剩余的水工建筑物计算的基本原理进行了学习。
Abstract
This week, I read the literature to understand the role of PIN in reconstructing the pressure field, and compared the traditional method with the PINN in constructing the pressure field, showing the advantages and disadvantages of PIN in constructing the pressure field. In Fluent, the case of open channel wave boundary simulation was selected to solve the geometric division and setting. In terms of theoretical learning, the basic principles of the calculation of the remaining hydraulic buildings were studied.
文献阅读:基于物理信息神经网络的压力场重建比较评价
Comparative assessment for pressure field reconstruction based on physics-informed neural network
文献摘要
本文将PINN方法与基于谱分解的快速压力积分和基于压力梯度和正交路径积分的旋转校正两种传统压力重建算法进行了比较,并利用Taylor衰减涡和强迫各向同性湍流两种流动运动对其性能进行了数值评价。
目的是利用PIV测量的数据令PINN重建压力场,并通过与SDFPI和ICOPI 这两种算法的比较,量化基于PINN的压力重建的性能。
结果表明,在速度场受测量误差影响较大的情况下,基于PINN的压力重建方法优于其他方法。
提出问题
- 通过积分沿指定路径的压力梯度来计算压力的话,压力重建对许多因素都很敏感,包括:速度噪声、边界条件设置、数值方法、时空分辨率、以及误差情况。
- 对所有路径的压力进行平均且自带虚拟边界的全向积分法(VB-ODI),虽然该策略可以减少对积分路径的依赖和测量噪声的影响,但存在低效率和高复杂性的问题。
- 使用八路积分方法(EPI),只集成8条固定路径上压力,虽然比VB—ODI快,但得出的效果差强人意。
研究方案
使用的PINN框架
本次实验中PINN架构如下图所示:
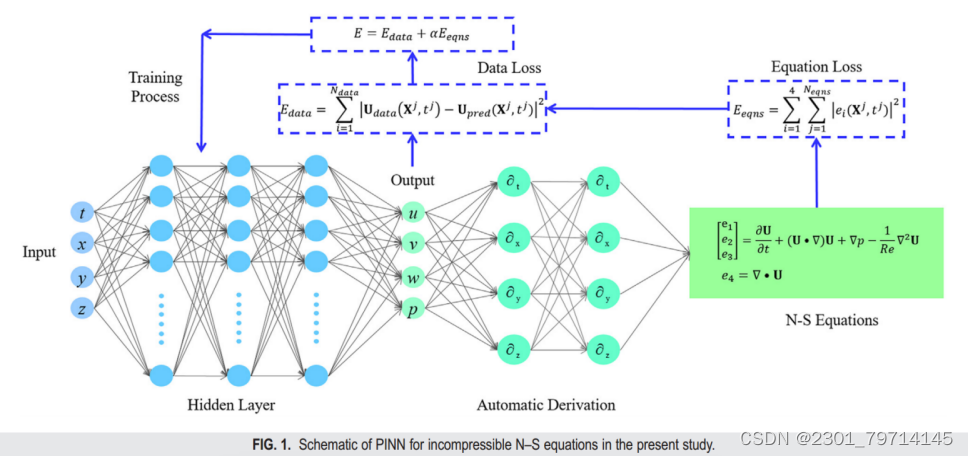
建立残差神经网络来拟合输入和输出之间的关系,可以表示为:

式中:U为速度矢量;P为压力;RNN为神经网络,其中X、T为时空坐标,θ为训练数据。
网络将被训练10000个epoch,每个epoch有10个步骤,除非另作说明,否则不做改变。
所需方程
利用PINN中的自动微分链式法则(AD)出发,将NS方程中的各项偏导数,可表示为:

式中:e 1、2、3为X、Y、Z方向上的残差,Re为雷诺数,e4为连续性方程的残差。
通过定义总损失函数E为:
其中α为加权系数。具体表达式如下:
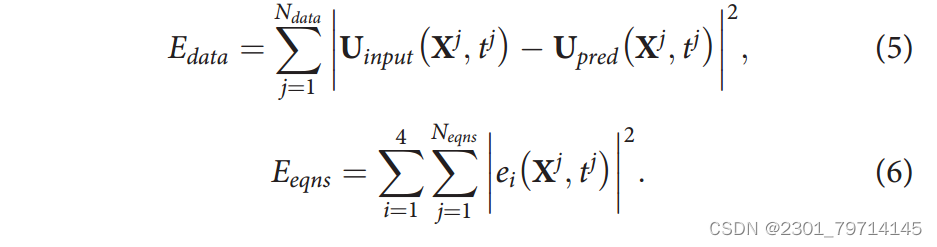
该式表示为输入速度数据和预测数据中的数据丢失量,eqns表示为N—S的残差;包括e1、e2、e3和e4,参数Ndata和Neqns是数据点和方程点的个数。
由于加权系数α不能提高精度,故在本文献中α=1.
实验设置
为了全面考察PINN在压力重构中的性能,文献使用两个数值算例和一个实验算例进行测试。
- 选取具有理论解的二维流场(二维Taylor衰减涡),生成精确的速度场;通过在速度场中加入不同程度的人工噪声,对比了基于PINN的压力重建方法的鲁棒性和精度。
- 使用强迫各向同性湍流来确定PINN是否可以从二维测量推断出三维压力。除了比较不同方法重建的压力外,还讨论了速度空间分辨率对压力重建的影响。
- 通过合成射流碰撞实验验证了该算法的性能。
实验一:采用二维Taylor衰减涡的理论解来验证不同方法之间的压力重建性能
不可压缩N-S方程在Re=1的二维解表示如下:
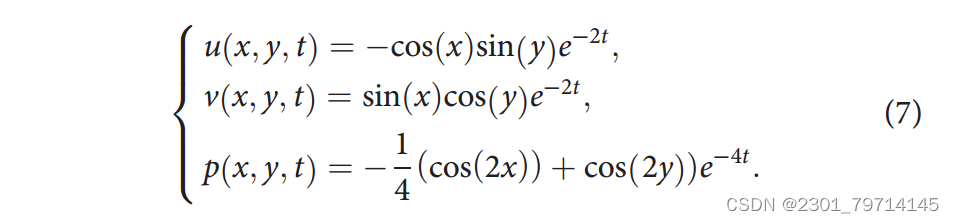
计算域的大小设为(Lx, Ly, Lt)=(2Π, 2Π, 1),网格点表示为: (Nx, Ny, Nt) =(100, 100, 100), 使其均匀分布。
本研究在理论速度场中加入高斯白噪声来模拟实验测量中的测量噪声:
噪声级r的取值范围为0% ~ 25%,定义为随机噪声的标准差与速度波动的比值。当r达到10%时,信噪比(SNR)降至19.8 dB,其中信噪比(SNR0=10 log10 (Ps/Pn) dB, Ps为整个理论速度值的平方和,Pn为实际的速度噪声值平方和。
实验结果展示
PINNSDFPI和PINN-IC-OPI是指利用经PINN优化的速度场的SDFPI和IC-OPI来计算压力。
图2(a) -2 (c)分别显示了使用SDFPI、IC-OPI和PINN方法重建的压力场。此外,还给出了使用pin - sdfpi和pin - ic - opi计算得到的压力场对比图:
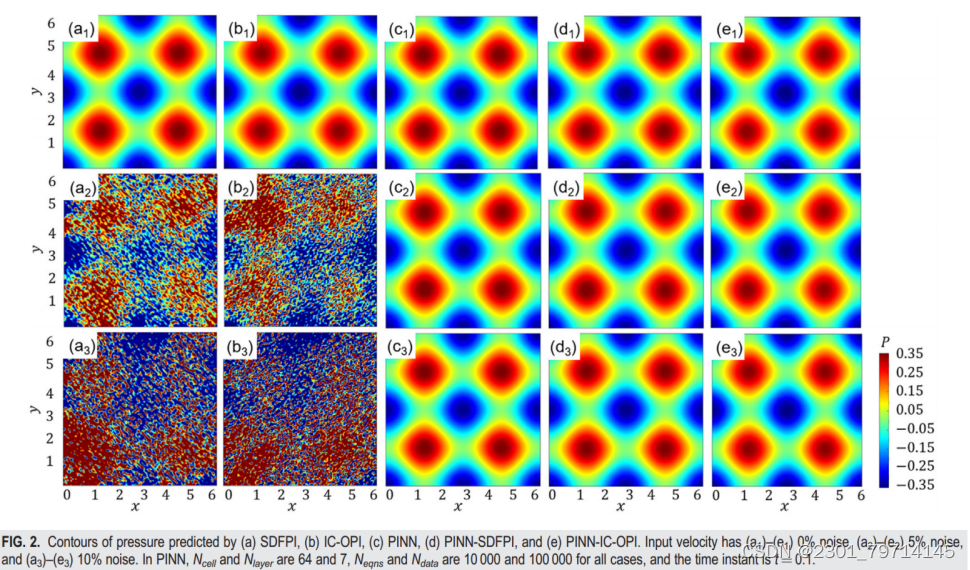
当速度场未被污染时,即噪声级为0时,各方法重建的压力场均与公式(7)中的理论解一致。当噪声级增加到5%和10%时,SDFPI和IC-OPI方法几乎无法重建压力,结果受噪声污染明显;对于PINN,噪声水平对重构压力的影响很小(图2)。
由图可知,SDFPI和IC-OPI对速度噪声都非常敏感,这可以归因于计算材料导数时的误差放大。然而,在处理优化速度时,SDFPI和IC-OPI的压力重建性能显著提高。
因此,基于PINN的压力重建优于其他方法,因为PINN具有优化速度的能力。
后进行定量分析:

式中:e为精确值,p为预测值,ref为参考值。
图(3)中可以看出噪声对预测压力场的影响:

其中:IC-OPI 和SDFPI对速度噪声敏感,L2范数压力相对误差远大于L2范数速度相对误差。
从(b)中可以看出,使用PINN重建压力场时,当噪声水平增加到25%时,与SDFPI和IC-OPI方法相比,显示出显著的降低。
对于传统方法,如果使用PINN优化的速度场重建压力场,压力的相对L2范数误差要比直接计算的小得多,因此,当测量的PIV数据质量较差且受噪声污染时,PINN可以极大地帮助提高速度和压力的质量。
为了充分发挥PINN的优势,需要进一步评估数据点个数和方程点个数对PINN性能的影响。图4显示了压力相对L2范数误差与Neqns和Ndata的关系。噪声水平为0%、5%和10%,数据点和方程点的个数分别为100 ~ 100000和10 ~ 10000。Ndata不能设为0,因为没有数据点的神经网络训练是不可行的。
神经网络有7层,每层64个神经元,学习率逐步降低,初始学习率为0.01。
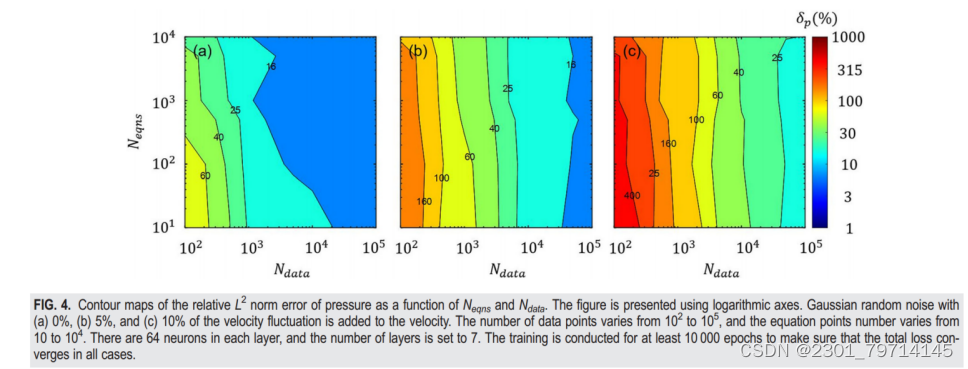
随着Ndata和Neqns的增加,特别是Ndata的增加,神经网络的性能会更好,dp会降低。对于不同的噪声水平,增加方程点的数量对压力场的精度影响有限。
在特定的Neqns下,相对L2范数压力误差随Ndata的增加呈明显的减小趋势。即使将噪声级r设置为10%,dp最终也可以收敛到约20%。增加Ndata可以减小预测压力场的相对L2范数压力误差。
因此,用更多的数据点来训练PINN是一个明智的选择。
在0%、5%和10%的速度噪声水平下,还评估了每层中数据点数量和神经元数量对PINN性能的影响。图5显示了压力相对L2范数误差与Ndata和Ncell的关系。参数Ncell从16增加到64,表示神经网络的规模从小到大。
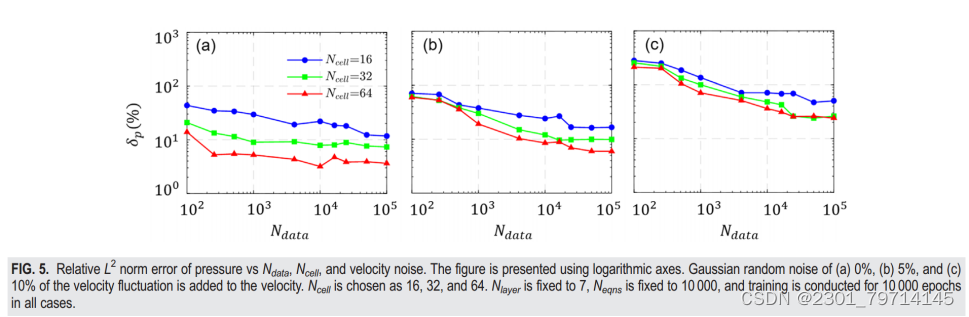
增加网络的规模(以Ncell表示)也可以减少预测压力场的相对L2范数压力误差,但这只有在给PINN提供足够的数据时才有效。压力的相对L2范数误差随噪声水平的增加而增大,这表明PIV的测量噪声确实会使PINN的性能恶化;然而,PINN可以降低速度噪声对压力估计的影响。
实验二:强迫各向同性湍流
图4所示。压力相对L2范数误差随Neqns和Ndata的函数的等高线图。该图用对数轴表示。在速度中加入(a) 0%、(b) 5%和(c) 10%的速度波动的高斯随机噪声。数据点个数为102 ~ 105,方程点个数为10 ~ 104。每层64个神经元,层数设为7。训练至少进行10000次,以确保在所有情况下总损失收敛。
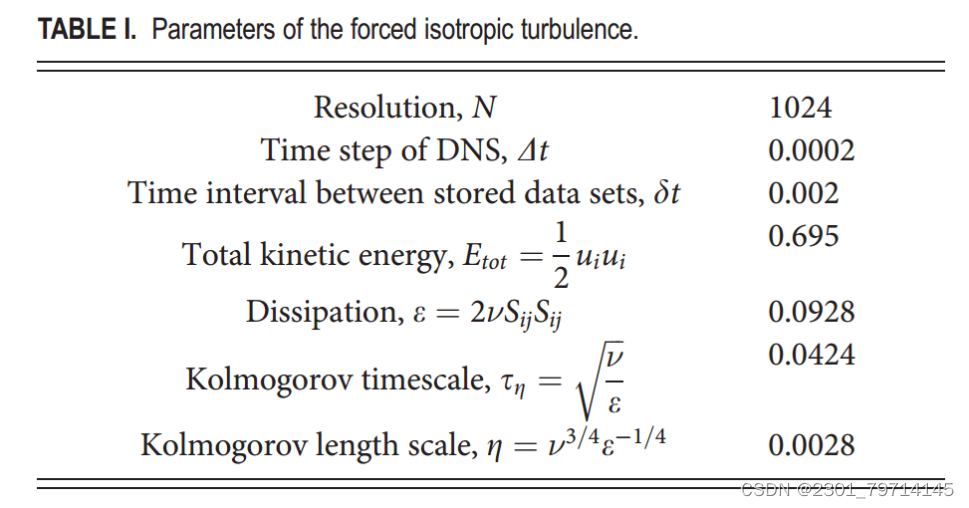
仿真时间步长为0.0002。数据以每10个DNS时间步长存储,因此样本以时间步长为0.002存储。总动能和耗散率由t=0和t=10之间的时间平均计算,数据集参数如表1所示。
实验结果
在粒子图像对生成过程中,首先使用Kolmogorov长度尺度g和时间尺度sg对网格和速度进行无量纲化处理。然后,基于生成的粒子图像对,采用主流的基于fft的互相关PIV方法计算速度。图6显示了原始DNS数据和第100次快照时SDFPI、IC-OPI和2d PINN计算的压力场:
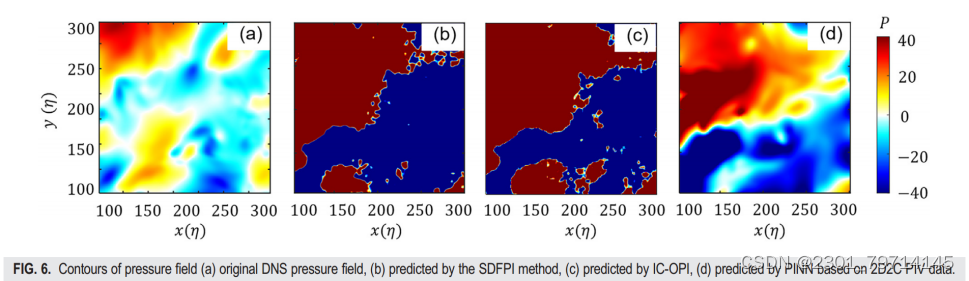
因为强迫各向同性湍流的强三维性,即与x和y方向具有相同数量级的第三方向的速度和速度导数的影响,所有重建的压力都与DNS数据存在较大偏差。
因此,对于强迫各向同性湍流等三维流动,平面PIV不可能得到正确的压力场。特别是,由于流动的三维性很强,压力梯度在计算压力时存在较大误差,导致SDFPI和IC-OPI的结果在当前色阶下显得相似。
从同一数据集构建了2D3C PIV速度数据,以评估三维性对基于PINN的压力重建的影响,图7显示了PINN使用高分辨率2D3C PIV数据重建的速度和压力。PINN重建的流场与DNS参考数据吻合较好。为了验证重建质量,图8分别给出了高、中、低分辨率下的相对误差。
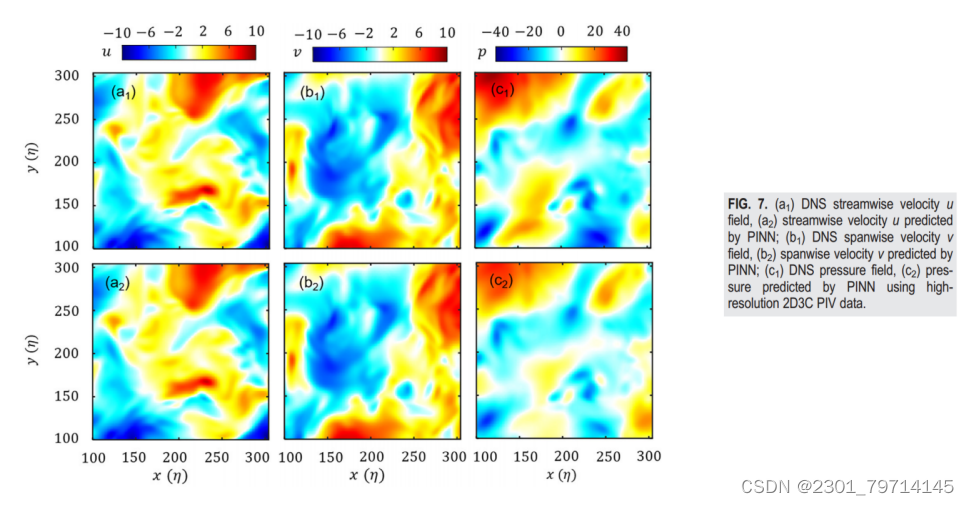
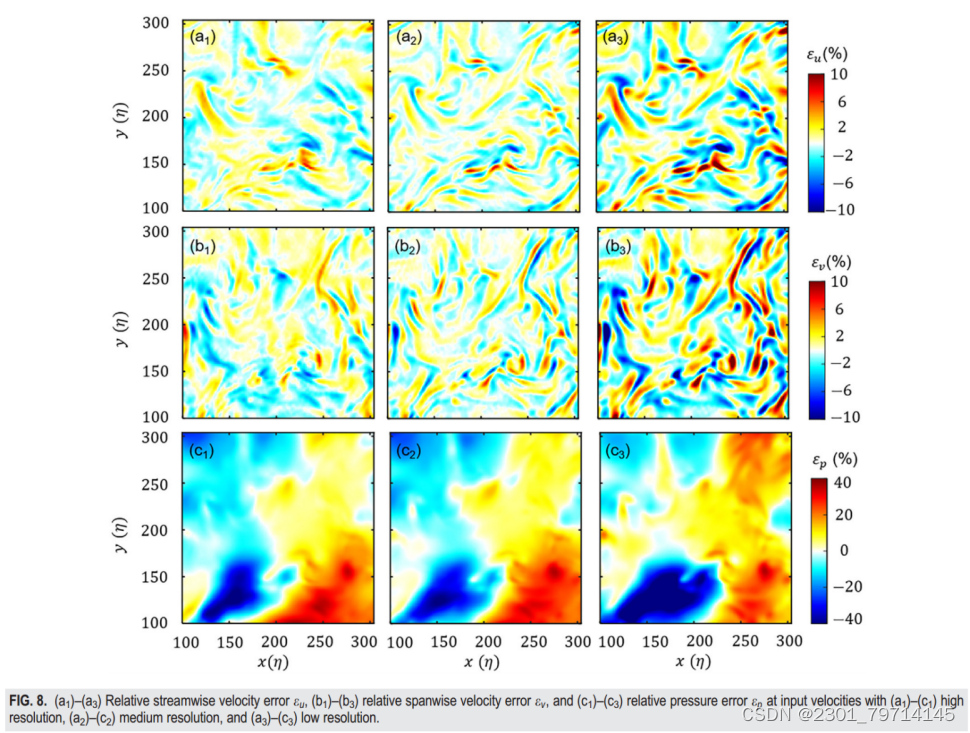
从目测结果来看,我们可以得出结论,PINN可以正确地从高分辨率2D3C PIV数据中重建速度和压力。
基于2D3C数据的PINN策略对于压力重建是可行的。同时,PIV数据分辨率的提高也有利于提高PINN的性能。PTV数据可能更适合基于pinto的压力重建。
实验三:合成射流撞击固体壁面
实验是在一个大水箱里进行的。该合成射流由活塞缸执行器制造,出口直径为D=10 mm,选取驱动频率为f0=0.6 Hz时的射流雷诺数为Resj=332,采用时间分辨平面PIV系统测量合成射流对称平面内的流体速度。
由于PIV数据是在合成射流的对称平面上获得的,所以PINN的损失函数采用柱坐标下的二维N-S方程。首先将PIV速度场插值到结构化网格中,然后采用PINN、SDFPI和IC-OPI三种方法计算压力。
在PINN计算中,神经网络设置为14层,每层64个神经元,在损失减小到小于102时,在30,000次epoch后提取压力结果。
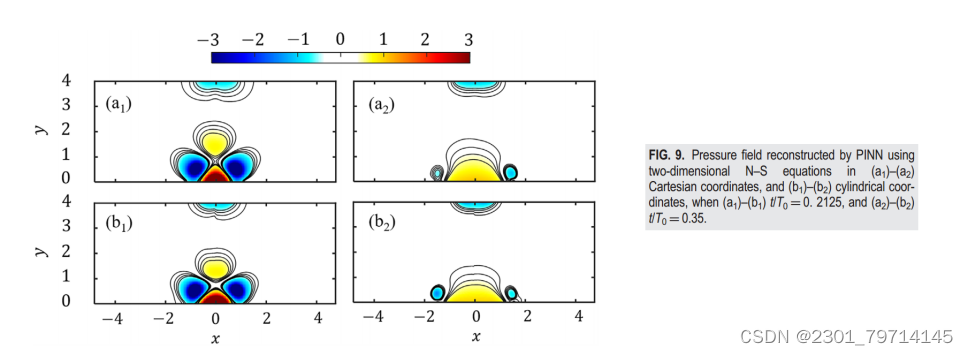
SDFPI和IC-OPI在笛卡尔坐标下求解。此外,为了定量地显示坐标系选择的影响,图9将PINN在柱坐标和笛卡尔坐标下使用二维N-S方程计算的压力进行对比。
实验结果
PINN、SDFPI和IC-OPI计算的压力场分别如图10(a) -10 (c)所示:
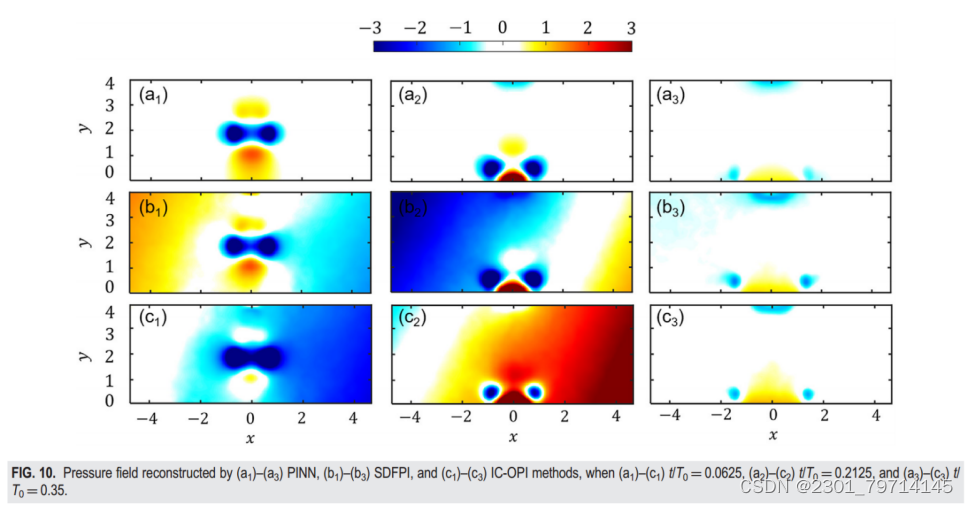
如上所述,IC-OPI和SDFPI对噪声和边界条件都很敏感;因此,这两种方法对实验数据的处理性能较差。
如图10(c1) -10 (c3)所示,虽然SDFPI和IC-OPI可以呈现与撞击合成射流相关的基本压力分布,即涡核处的低压和撞击停滞处的高压,但其计算的压力场受到测量噪声的严重污染,特别是在静止的周围流体中[见图10(b)和图10(c)]。从图10(a)可以看出,由PINN重建的压力场很好地解析了撞击合成射流的涡环演化过程。这一结果表明,PINN具有最好的性能。
为了说明压力在揭示流动动力学机制中的作用,图11显示了根据PINN估计的涡度场和壁面压力分布:
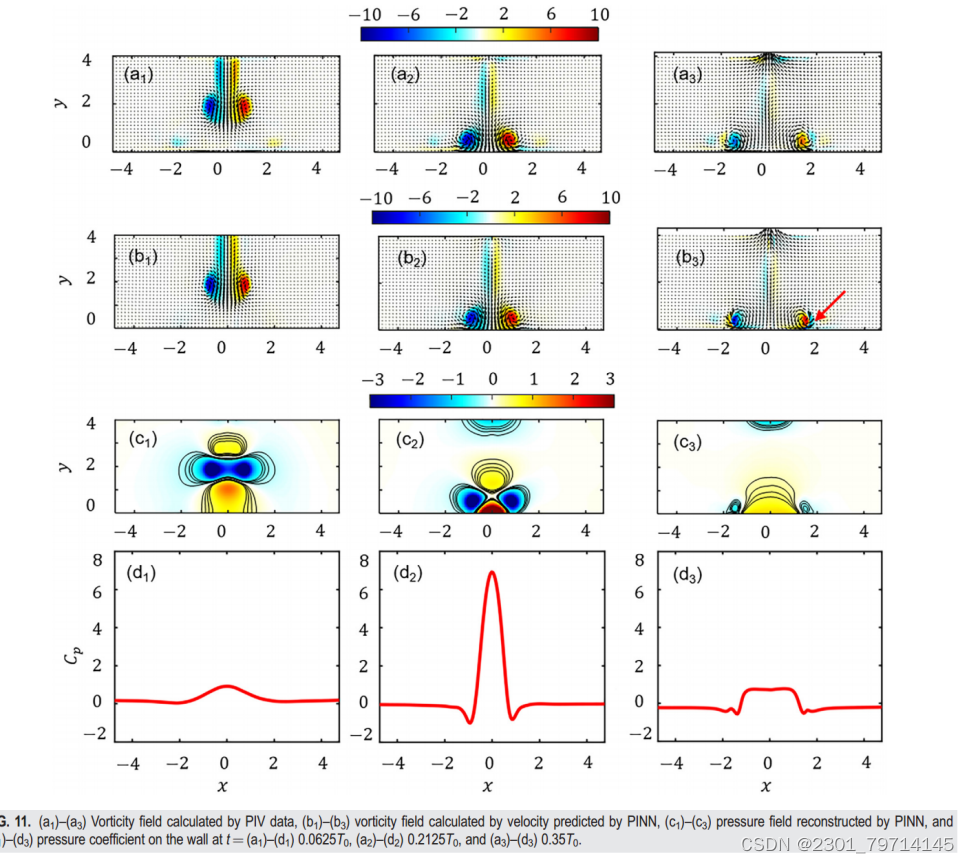
射流孔流出的流体在撞击壁面之前形成一个涡环,其后是一个尾随射流。涡核有一个低压区,在涡核的前部和后部产生高压区,这些高压区与随着环运动的参照系中的前后驻点有关。壁面压力分布在射流中心线处(x=0)出现峰值,表明可能与壁面早期相互作用。
当涡流环在t/T0=0.2125时向前撞击壁面时,壁面滞止点周围形成高压区,在x¼61附近出现两个压力谷,对应于初级涡芯的位置,如图11(b2)和11(c2)所示。从图11(d2)的壁面压力分布可以看出,由于涡流/壁面的强烈相互作用,射流中心线处的系数峰值比图11(d1)和图11(d3)有了明显的增加。特别是,在压力谷(x=61)之后,似乎沿径向流动将经历逆压力梯度(APG)。这意味着可能发生潜在的流动分离。
当时间演化到t/T0=0.35时,主涡环继续与壁面相互作用,沿径向扩展。在此过程中,压力场中的停滞峰和涡芯谷都有了明显的减小,如图11(c3)所示。值得注意的是,在壁面压力分布中,除了第一次涡芯谷外,还发现了第二个压力谷,如图11(d3)所示。如图11(b3)中红色箭头所示,第二个谷是由撞击的主涡环引起的壁面剪切层分离形成的二次涡环造成的。
壁面压力在射流中心线附近呈现一个平台,这是由于尾随在主涡环后面的尾射流的撞击所致。
对于其他复杂流动和压力场难以测量的流动,PINN可以帮助重建压力场,这有利于深入分析复杂流动现象,例如当前案例中显示的涡/壁相互作用的演变。
结论
- 与传统的压力重建方法,即SDFPI和IC-OPI不同,PINN可以同时优化PIV速度和预测压力。
- 即使输入速度场受到噪声污染,PINN也能以最小的相对压力误差重建压力场。这是因为PINN可以通过施加物理约束来优化速度。利用优化后的速度场,传统方法也能得到更好的压力场。同时,增加Ncell、Ndata和Neqns可以减小压力误差,且Ndata的影响大于Neqns的影响,这表明,通过增加测量数据的数量,可以提高基于pup的压力重建的性能
- 对于三维流动,如强迫均匀各向同性湍流,即使对于提出的PINN,也无法从2D2C速度场中恢复压力。然而,3d PINN具有从2D3C速度场重建压力的能力,PIV中互相关算法引入的调制效应会降低PINN的性能;因此,高分辨率、低噪声的数据可以提高压力重建的精度。
- PINN能够准确预测二次涡等在实验测量中难以观测到的复杂流动结构,对于理解合成撞击射流的流动结构演变具有重要意义。(PINN选择合适的参数是关键且耗时的。还需要进一步研究节省计算时间的可能性)
Fluent实例:基于多相流模型的明渠波动仿真
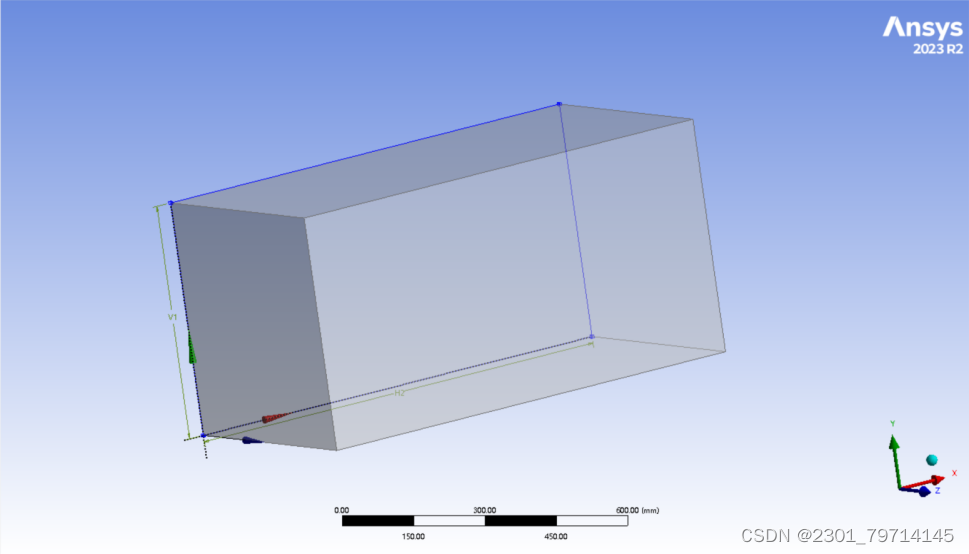
几何建模
在design modeler中调整单位为mm,在XY平面中进行草图绘制一个500mm宽,1000mm长的矩形,使用挤出命令,选择添加冻结,挤出深度设定为500mm:
切换坐标轴为ZX平面,绘制出一个在箱体中心直径为100mm的圆,再次挤出,深度为500mm:
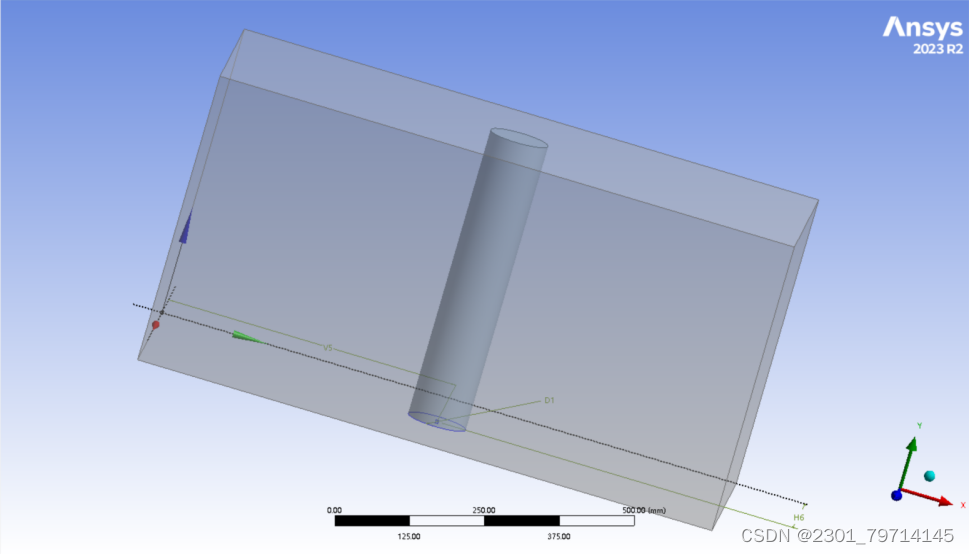
、
使用boolean命令来将两个固体边界分开,再将两者形成一个新部件,建模完成。
网格划分
直接生成网格,检查几何体绘制是否出现问题,采用自适应尺寸调整,分辨率使用5,但原案例中网格仅5w,分辨率为5时总网格有16w,不排除版本不同的问题:
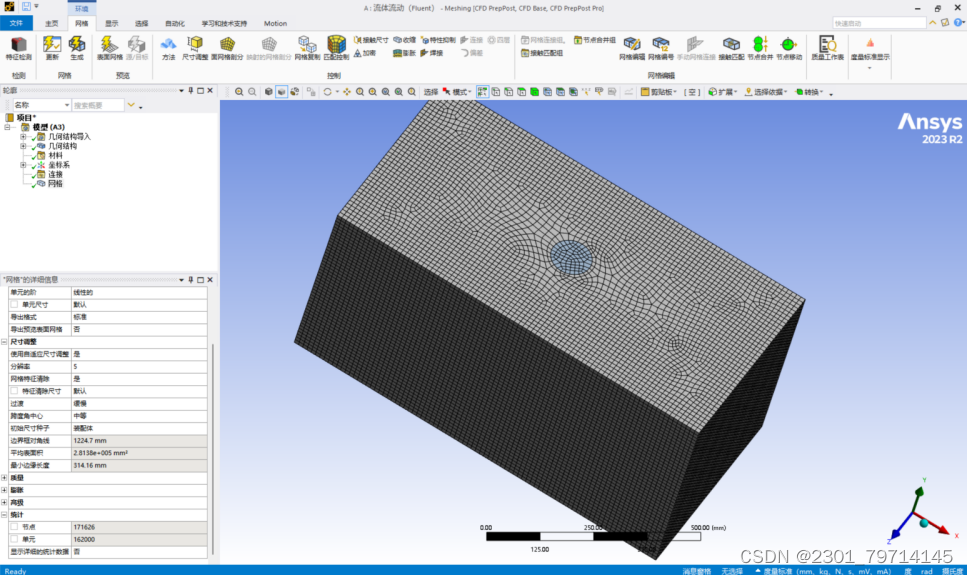
对几何体进行命名,圆柱体为固体区域,其矩形为流体区域。再几何结构中也要进行选择,网格划分完成。
求解器设置
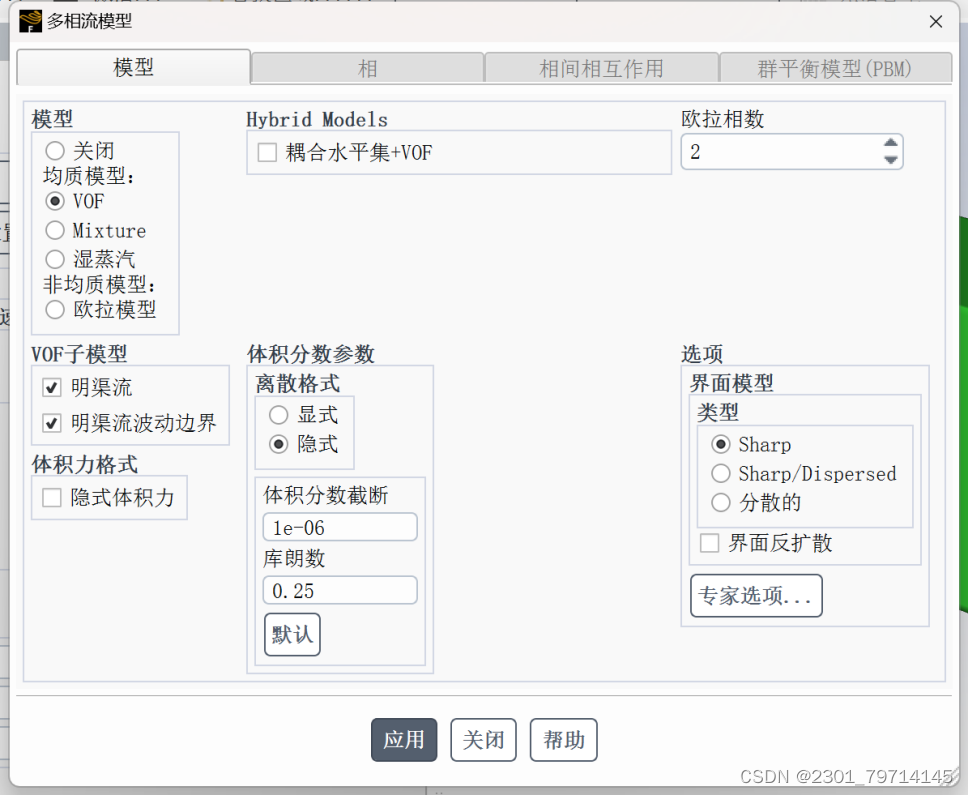
打开重力,Y方向上-9.81m/s2,时间采用瞬态计算,粘性模型采用层流。采用VOF多相流模型,详细设置如下:
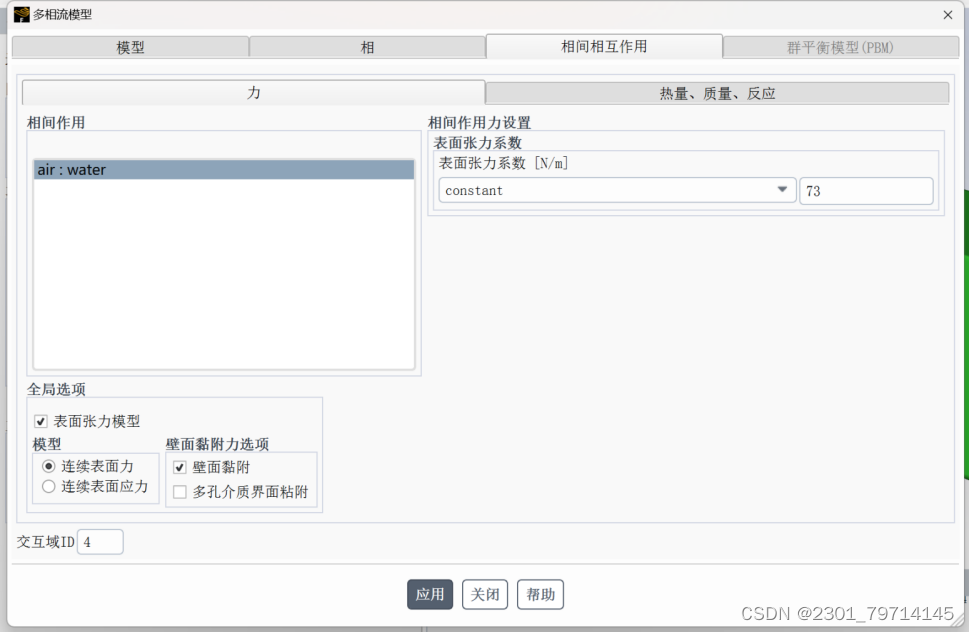
将材料库中的水调出,设置两项的流体材料(一般使用更重的流体作为第二相),相间相互作用如下设置:
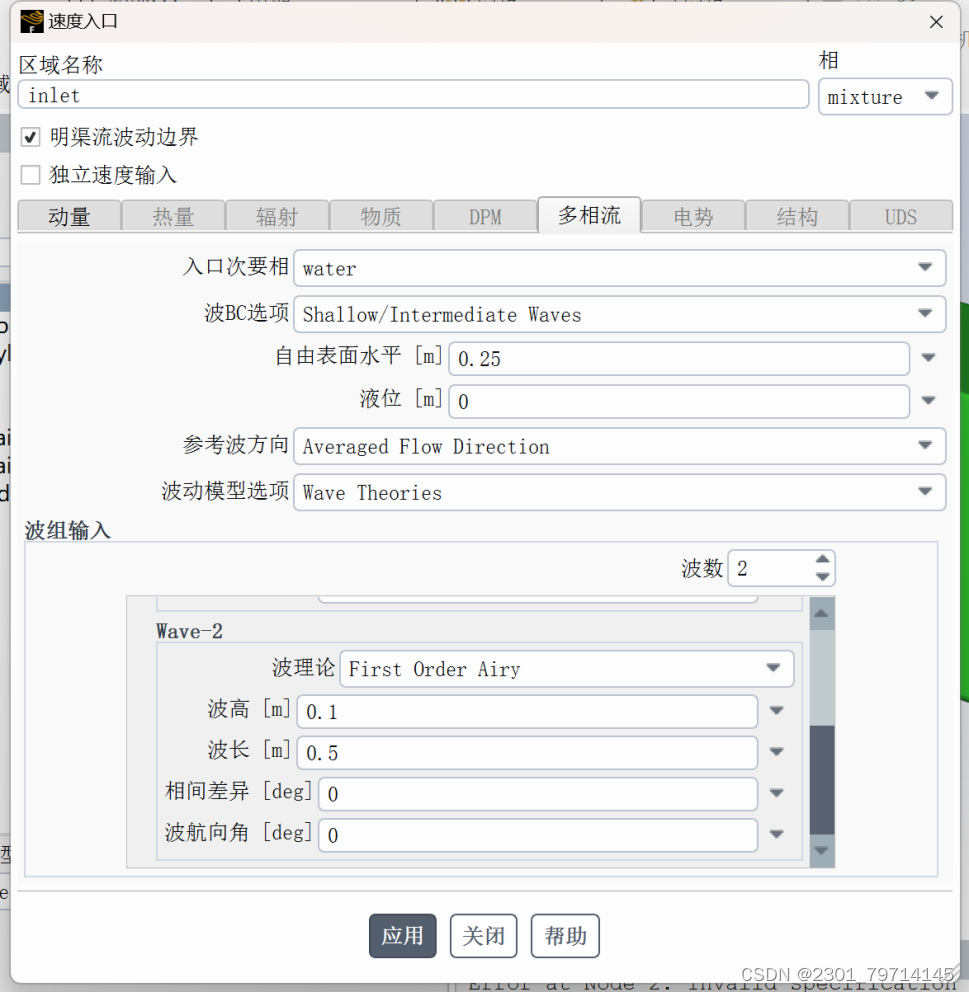
进入边界条件设置,对进口处速度进行设置,采用明渠波动边界条件,平均流速为0.01m/s2;多相流中两个波的波高波长相同:
出口处同理,其余边界条件保持默认。求解方法如下图所示:

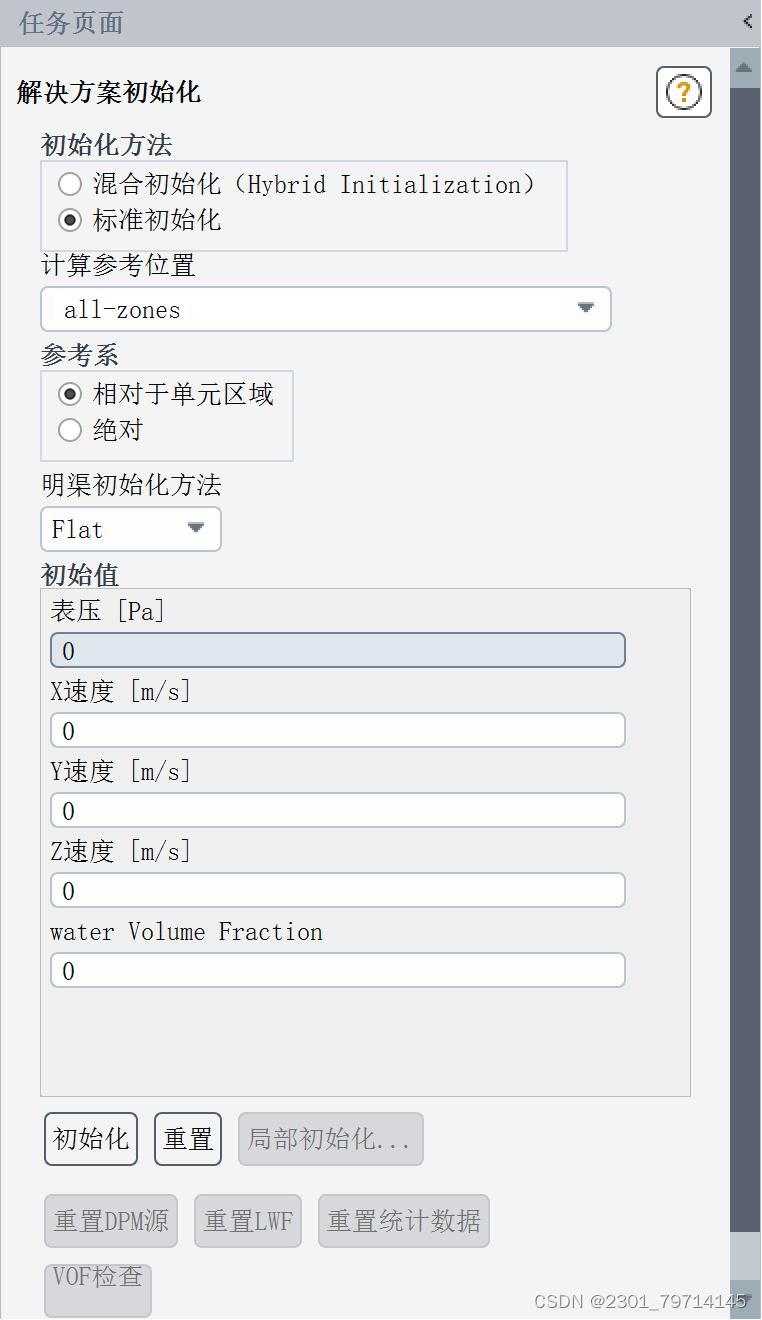
动量的松弛因子改为0.5,初始化设置如下所示:
结果展示
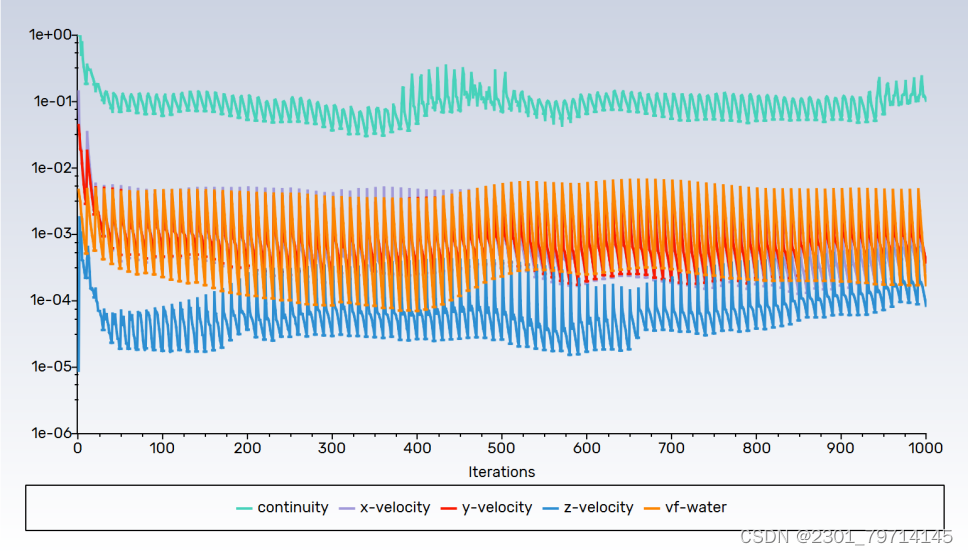
残差:
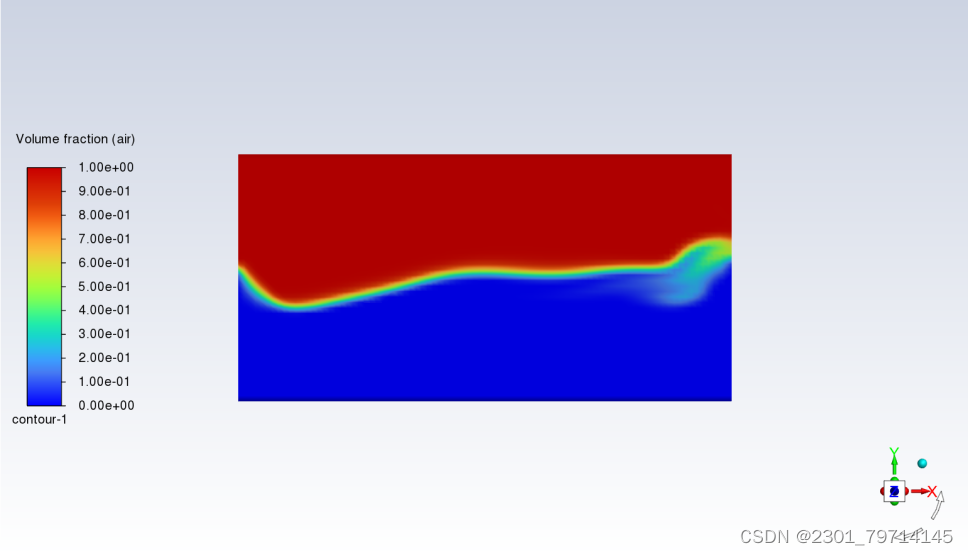
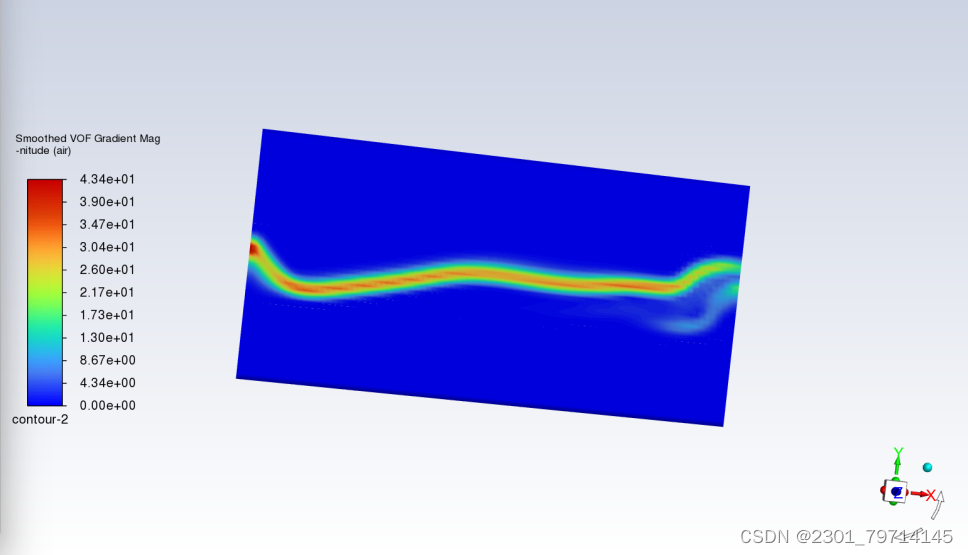
体积分数云图:
水力学基础部分

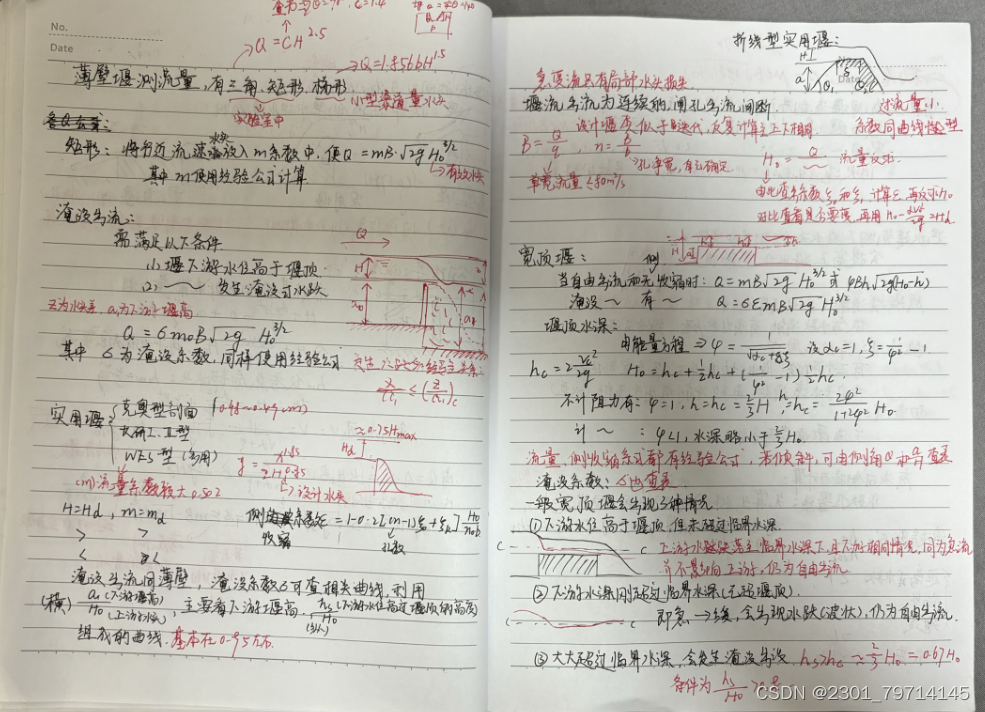
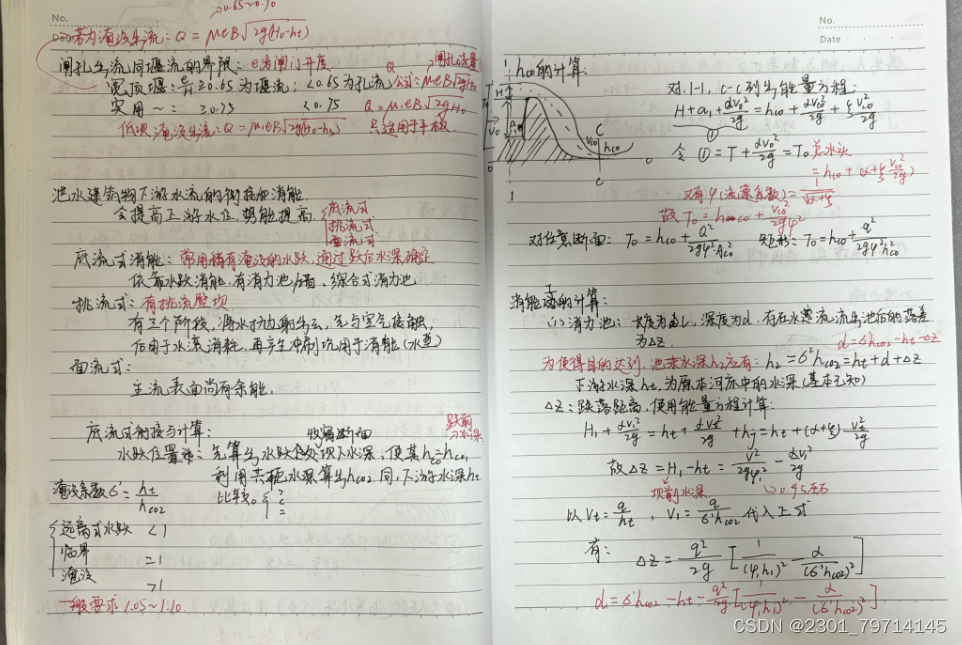
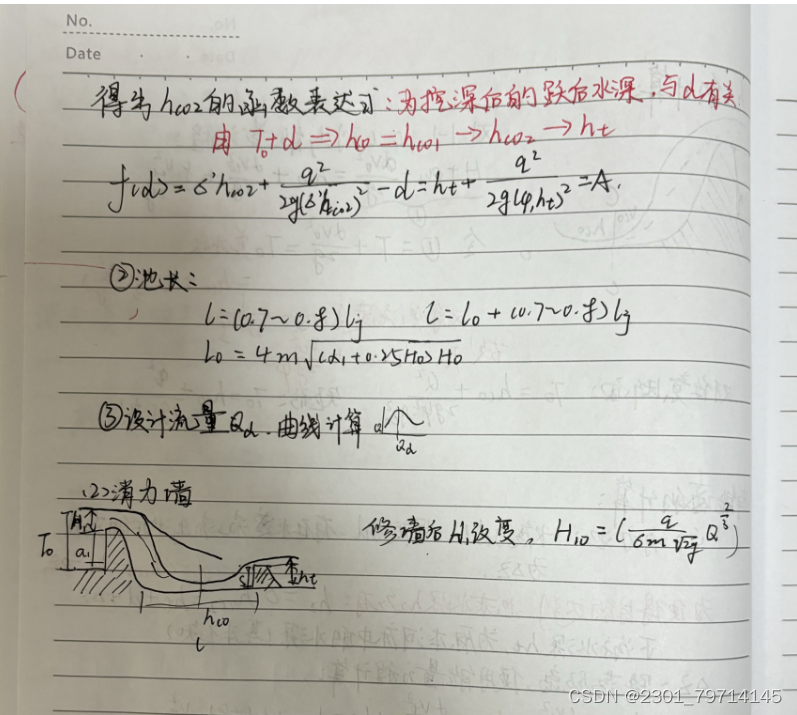
总结
这一周看水力学发现后面的知识更多倾向于水工建筑物的理论计算和如何设计方向,与我现在的学习目的不相符,故放弃后面的内容,转向流体力学的知识,看看流体力学和水力学中的相同和不同之处。

