
- 1【C#重构】——显示信息居中_wpf label居于panel中心
- 2[NOIP2018 普及组] 对称二叉树_noip2018对称二叉树
- 3CycloneII特殊管脚的使用_quartus2里cydone二
- 4【DevOps】路由与路由器详细介绍:原理、功能、类型及应用场景
- 5Git强制 push && pull_git pull强制上传
- 6java枚举和switch案例_javaswitch案例
- 7蓝易云 - 独立站:跨境人的私人平台。
- 8Stream流使用方法总结_stream流常用方法
- 9androidstudio adb 端口号 被占用_studio 占用adb端口
- 10AI人工智能 大模型开发实战出真知系列:简单了解LangChain Expression Language-实战篇_ai 算法模型 开发
GCN-LSTM预测道路交通车辆速度 英文 Vehicle Speed Forecasting Based On GCN-LSTM Combined Model
赞
踩
GCN-LSTM模型预测道路交通车辆速度
GCN:又称GNN,图神经网络 LSTM:长短时记忆网络
Vehicle Speed Forecasting Based On GCN-LSTM Combined Model
Summary
This research offers a multistep traffic flow forecasting framework relying on interest spatial-temporal-graph neural network-long short-term memory neural network to address the traffic network's traffic flow forecasting challenge. The algorithm can record the complicated dependency structure of road nodes on the road network. It could obtain parameter estimation information from the K-order local neighbors of road connection nodes in the road network using LSGC (local spectrogram convolution). To broaden the receptivity range of graph inversion, it is more precise to collect knowledge from neighbor nodes by substituting the single-hop neighborhood matrix with K-order local neighborhoods. The high-order neighborhood of road nodes is entirely determined rather than merely containing attributes from first-order neighbor nodes. Moreover, an exterior characteristic improvement unit is developed to collect extrinsic parameters that influence traffic flow (weather, points of interest, time, etc.) to strengthen the framework’s traffic movement estimate reliability. The empirical findings reveal that the model performs well when evaluating static, dynamic, and static + dynamic combinations.
Introduction
Efficient traffic flow projections could reduce congestion problems, travel arrangements, traffic control for drivers and operators, and decision-makers [Li et al., 2021, 102977]. “Traffic projections are an important sector in the survey of intelligent transportation, and efficacious traffic flow prediction could alleviate traffic congestion, travel planning, and traffic management for individual drivers and decision-makers.” Environmental crises [Fan et al., 2017], process variables, and permanent variables will significantly impact the intricate temporal and spatial connections between traffic flow. Yu et al. [2017, 1501] and colleagues devised an ARIMA that could only handle nonstationary time series data. It is tough to investigate links across data streams, and it is no longer appropriate for today's operations. Furthermore, while conventional linear models, including a series of Kalman sifting approaches introduced and enhanced by Cao et al. [2020], have increased the quality of forecasting in certain elements, their capacity to accommodate nonlinear traffic flow data remains poor, and forecasting time is increased [Yang et al., 2017].
“Conventional machine educational methodologies, including support vector regression (SVR),” [Fu et al., 2016], “k-nearest neighbor algorithm,” [Liu et al., 2021], K-NN (K-nearest neighbor), and decision tree models [Nguyen et al., 2018, 1001], could delve deeper out the crucial regulations and rich details concealed in traffic flow from large datasets [Chen et al., 2018], and effectively enhance the traffic flow projections advancement procedure.
The advancement of artificial intelligence's usefulness in traffic projection has been aided by the creation of extensive neural network architectures. While several simple network architectures can increase model traffic forecast accuracy [Ma et al., 2017, 818], they have drawbacks like sluggish completion, over-fitting, and constant variance [Feng et al., 2019, 2009]. “Recurrent neural networks (RNN) [Zhang et al., 2018], extended short-term memory networks (LSTM),” [Li et al., 2017]. Gated recurrent unit (GRU) [Li, Linjia, et al. 2021, 2150481] may successfully employ the self-loop mechanism and acquire time-series properties to increase forecast efficacy compared to classic neural networks models. As a result, it is included in every framework to anticipate traffic speed, trip duration, and traffic flow, among other things.
A detailed description of the model
Graph Neural Network (GCN)
Because the transport system could be thought of as a graph made of nodes and edges. “It has been applied for dynamically shortest path transmitting, traffic congestion assessment, and dynamic traffic distribution,” [Aghdam et al. 2021, 17].
The most frequent strategy for our graph network study is to discover a range framework in the range sphere [Guo et al., 2019, 3917] and construct the spectrum combination depending on the chart Laplacian matrix to create the spectrogram convolution model. We utilize the local spectrogram convolution with a polynomial filtration system to reduce the number of variables and focus on saving the arithmetic period. “However, the Laplacian matrix power action still necessitates a lot of determination and high dimensionality, so the Chebyshev polynomial is presented to determine the K-order local transformation function, which could dramatically lessen prediction error from the square level to the linear story,” [Azari et al., 2019].
As demonstrated in Figure 1, the spectrogram convolution approach employing Chebyshev polynomial calculation could record information from the K-order local neighbors of the graph's apexes, fully accounting for the node's high-order neighborhood rather than only the single-hop neighborhood. The responsive range of graph convolution is expanded in this chapter by substituting the single-hop neighborhood matrix with the K-order local neighborhood, which extracts data from neighbor nodes more precisely.
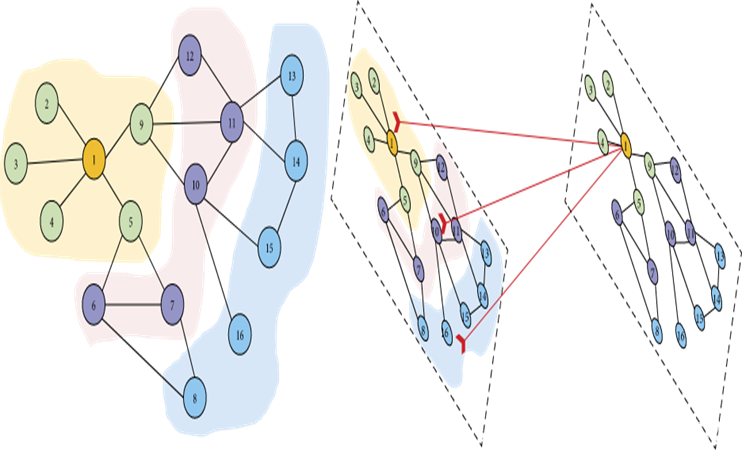
Fig 1: K-hop neighbors of graph convolution
GCN-LSTM Structure
We integrated a long- and short-term memory neural network LSTM to record the complicated spatial linkage and busy time connection of traffic data in the actual world. “LSTM is an upgraded recurrent neural network (RNN), and whenever the training time series is long enough, LSTM outperforms ARIMA" [Li et al. 2021, 11269]. A specific cell unit, not a typical neuron node, is the fundamental entity of the LSTM concealed tier. This particular memory unit allows LSTM to address the RNN gradient inflation problem while simultaneously capturing the temporal correlation of traffic flow. We mix GCN and LSTM systems to represent the complicated geographical connection and active time association of traffic data in the physical biosphere. “The GCN model's job is to construct a graph of the road section's traffic statistics based on a predefined graph representation” [Sun et al., 2017, 210]. “It captures the spatial variation of such road sections in the road system every time by learning the depiction of the road section by incorporating the properties of the node's local neighbors. Then, these time-varying feature descriptions are fed into the LSTM model,” [Li et al. 2021, 1980].
Experiment Results and Analysis
Analysis of Static Attribute
We examine our suggested GCN-LSTM model to several frequently used methods approaches to assess its current effectiveness. The following are the frameworks:
- Historical average model (HA)
- Autoregressive integrated moving average model (ARIMA) with Kalman filter
- Support vector regression (SVR)
- Diffusion convolution recurrent neural network (DCRNN)
- GCN-LSTM:
Traditional nonneural network models such as HA, ARIMA, and SVR are one; DCRNN is a profound training algorithm that could record spatial information. GCN-LSTM is a profound training algorithm that thoroughly incorporates the longitudinal characteristics and active connection of traffic statistics. The total forecast accuracy of the GCN-LSTM framework and five typical approaches is shown in Table 1. To compare results, three measures are utilized: root means square error (RMSE), mean absolute error (MAE), and precision (accurateness) assessment.
As per Table 1, the RMSE values of the GCN-LSTM model drop by 2.06 percent, 33.37 percent, and 1.46 percent when opposed to the conventional approaches, HA, ARIMA, besides SVR, based on the outcomes of the 15-minute forecasting interval. The reliability score is enhanced by 7.34 percent and 0.78 percent, correspondingly, as contrasted to the HA and SVR models. Since this data has complicated spatiotemporal correlation and high-dimensional properties, HA, ARIMA, plus SVR could not compare by other approaches. Nonneural system techniques are not appropriate for network-wide time series forecasting. The RMSE worth of the AST-GCN-LSTM strategy that incorporates all peripheral characteristics into respect is 5.29 percent and 1.16 percent lesser than the DCRNN system also GCN-LSTM prototype, respectively when external characteristic variables are taken into account. MAE has a lower rating than the DCRNN and GCN-LSTM models, condensed by 7.36 percent and 1.21 percent, respectively. Table 1 shows that, when opposed to conventional approaches and other deep learning-based approaches, the procedure provided in this research has produced considerable gains, demonstrating the model's usefulness.
Analysis of the External Attribute
Comparative tests are conducted to evaluate the impacts of various feature qualities on traffic flow projection. There are four types of research conditions: adding static property traits solitary, totaling lively characteristic features solely, combining active also stationary peripheral element features simultaneously, yet not adding external element factors at all. Figure 2 depicts the outcomes. The addition of static feature attributes results in color yellow. The addition of dynamic attribute features resulted in gray. The color blue is the outcome of combining active and stationary extrinsic variables.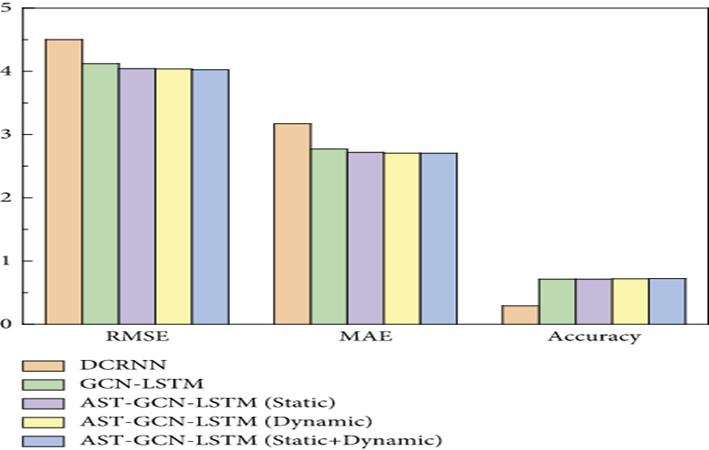
Fig 2: Experiment under different conditions
Figure 2 shows as when just dynamic attribute variables are examined, the GCN-LSTM (active) RMSE is 5.15% and 1.01% lesser than the DCRNN and GCN-LSTM framework, respectively. MAE has a lesser value than DCRNN besides GCN-LSTM algorithm, with reductions of 7.34 percent and 1.18 percent, respectively. When only static attributes are taken into account, the GCN-LSTM (stationary) RMSE is lessened by 5.15 percent and 0.85 percent, respectively, while contrasted to DCRNN plus GCN-LSTM algorithms. The MAE is condensed by 7.12 percent besides 0.93 percent, respectively. Whenever static and dynamic components are examined simultaneously, the RMSE of the GCN-LSTM algorithm is lessened by 5.29 percent and 1.16 percent, respectively, when opposed to the DCRNN algorithm plus the GCN-LSTM algorithm, and the MAE figure is lowered by 7.36 percent besides 1.21 percent, respectively.
Figure 2 shows that when just dynamic attribute elements are taken into account, the model performs better than once only stationary characteristic elements are well-thought-out. This also demonstrates the significance of taking active exterior characteristic information into account, besides we found that the model's efficiency is best when both static and dynamic parameters are taken into account. In conclusion, taking external information into account positively impacts the model's projection in real-world situations.
Conclusions
This research obtains dynamic property aspects by integrating the property augmentation unit design of various influences into the suggested GCN-LSTM model. The Chebyshev polynomial approximation spectrogram convolution algorithm is utilized to retrieve features after the vector representation has been augmented. From the K-order local neighbors of the nodes in the graph, this framework may describe the geographic properties of traffic flow. The K-order local neighborhood matrix can be applied to enlarge the approachable turf of the graph intricacy, allowing it to gain intelligence from neighbor nodes more precisely. After the data is recovered, the LSTM model records the partial derivatives by inputting the distinctive description of the information that evolves. It overcomes the difficulty of prior traffic prediction models by examining the efficiency of the suggested model, such as the operation assessment of external attribute features, and contrasting it with various foundation models to authenticate the efficacy of the projected algorithm. External influences impacting traffic movement are taken into account in full.
The findings demonstrate that the GCN-LSTM approach can successfully increase traffic predictive performance by considering the longitudinal association of road nodes and capturing the time dependency of traffic movement. Furthermore, the GCN-LSTM algorithm is appropriate for both road network traffic movement forecast and mid-and long-term traffic movement forecasting and multistep forecast.
Work Cited
Aghdam, Mahdi Yousefzadeh, et al. "Optimization of air traffic management efficiency based on deep learning enriched by the long short-term memory (LSTM) and extreme learning machine (ELM)." Journal of Big Data 8.1 (2021): 1-26.
Azari, Amin, et al. "Cellular traffic prediction and classification: A comparative evaluation of LSTM and ARIMA." International Conference on Discovery Science. Springer, Cham, 2019.
Cao, Miaomiao, Victor OK Li, and Vincent WS Chan. "A CNN-LSTM model for traffic speed prediction." 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring). IEEE, 2020.
Chen, Cen, et al. "Exploiting Spatio-temporal correlations with multiple 3d convolutional neural networks for citywide vehicle flow prediction." 2018 IEEE international conference on data mining (ICDM). IEEE, 2018.
Fan, Dongfang, and Xiaoli Zhang. "Short-term traffic flow prediction method based on balanced binary tree and K-nearest neighbor nonparametric regression." International Conference on Modelling, Simulation and Applied Mathematics. 2017.
Feng, Xinxin, et al. "Adaptive multi-kernel SVM with spatial-temporal correlation for short-term traffic flow prediction." IEEE Transactions on Intelligent Transportation Systems 20.6 (2018): 2001-2013.
Fu, Rui, Zuo Zhang, and Li Li. "Using LSTM and GRU neural network methods for traffic flow prediction." 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC). IEEE, 2016.
Guo, Shengnan, et al. "Deep spatial-temporal 3D convolutional neural networks for traffic data forecasting." IEEE Transactions on Intelligent Transportation Systems 20.10 (2019): 3913-3926.
Li, Junyi, et al. "Transferability improvement in short-term traffic prediction using stacked LSTM network." Transportation Research Part C: Emerging Technologies 124 (2021): 102977.
Li, Linjia, et al. "A spatial-temporal approach for traffic status analysis and prediction based on Bi-LSTM structure." Modern Physics Letters B 35.31 (2021): 2150481.
Li, Tao, et al. "Short-term traffic congestion prediction with Conv–BiLSTM considering Spatio-temporal features." IET Intelligent Transport Systems 14.14 (2021): 1978-1986.
Li, Yaguang, et al. "Diffusion convolutional recurrent neural network: Data-driven traffic forecasting." arXiv preprint arXiv:1707.01926 (2017).
Li, Yiqun, et al. "A hybrid deep learning framework for long-term traffic flow prediction." IEEE Access 9 (2021): 11264-11271.
Liu, Jiayu, et al. "Method of evaluating and predicting traffic state of highway network based on deep learning." Journal of Advanced Transportation 2021 (2021).
Ma, Xiaolei, et al. "Learning traffic as images: a deep convolutional neural network for large-scale transportation network speed prediction." Sensors 17.4 (2017): 818.
Nguyen, Hoang, et al. "Deep learning methods in transportation domain: a review." IET Intelligent Transport Systems 12.9 (2018): 998-1004.
Nguyen, Tu. "Spatiotemporal tile-based attention-guided lists for traffic video prediction." arXiv preprint arXiv:1910.11030 (2019). https://arxiv.org/abs/1910.11030
Sun, Yunchuan, et al. "Discovering time-dependent shortest path on traffic graph for drivers towards green driving." Journal of Network and Computer Applications 83 (2017): 204-212.
Yang, Senayan, et al. "Ensemble learning for short-term traffic prediction based on gradient boosting machine." Journal of Sensors 2017 (2017).
Yu, Haiyang, et al. "Spatiotemporal recurrent convolutional networks for traffic prediction in transportation networks." Sensors 17.7 (2017): 1501.
Zhang, Chaoyun, and Paul Patras. "Long-term mobile traffic forecasting using deep Spatio-temporal neural networks." Proceedings of the Eighteenth ACM International Symposium on Mobile Ad Hoc Networking and Computing. 2018.
Appendix
Table 1
Performance comparison of different methods.
|

