
- 13D-DIC数字图像相关法测量流程介绍-数字图像采集_视觉软件中触发周期是什么意思
- 2【windows】亲测-win11系统跳过联网和微软账户登录,实现本地账户登录_win11跳过联网激活
- 3【数据结构和算法初阶(C语言)】时间复杂度(衡量算法快慢的高端玩家,搭配例题详细剖析)_衡量一个算法好坏一般以最坏的时间复杂度为标准
- 4如何在群晖NAS搭建bitwarden密码管理软件并实现无公网IP远程访问_群晖怎么安装bitwarden
- 5基于Hadoop的区块链海量数据存储的设计与实现_区块链 hdfs
- 6iOS(一):Swift纯代码模式iOS开发入门教程_swift 开发ios入门教程
- 7学懂C语言系列(三):C语言基本语法
- 8kafka架构深入
- 9Langchain-chatchat: Langchain核心组件及应用_langchain chatchat
- 10【爬虫】1.4 POST 方法向网站发送数据_网页爬虫 post数据
机器人开发--Cartographer详细介绍
赞
踩
机器人开发--Cartographer详细介绍
1 介绍
1.1 概述
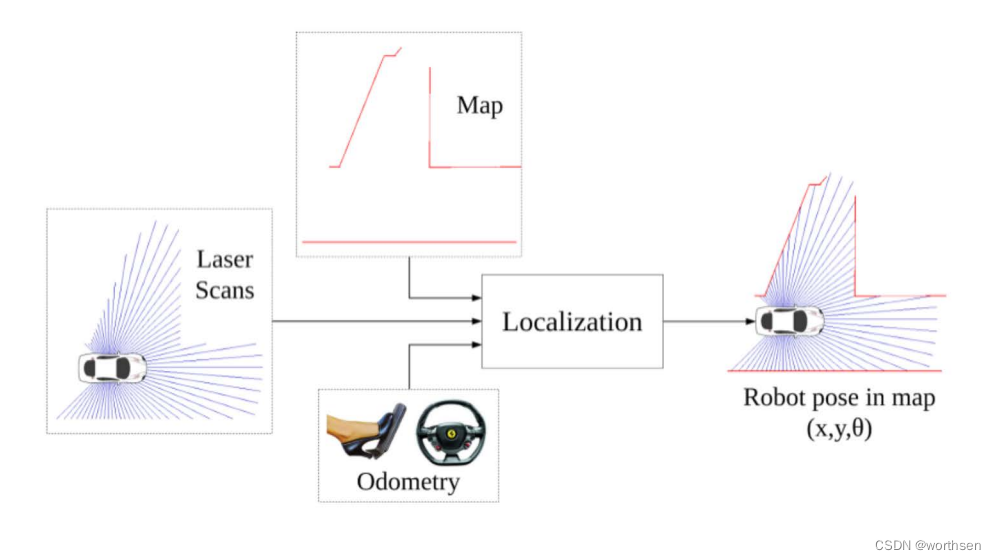
- Cartographer是一款可以跨多个平台和传感器配置提供2D和3D实时同步定位和绘图(SLAM)的系统。这个项目提供了Cartographer的ROS集成。
- Cartographer是google推出的一套基于图优化的SLAM算法。Cartographer算法并没有给人惊艳的感觉,但该算法的主要目标是实现低计算资源消耗,达到实时SLAM的目的。
- 该算法主要分为两个部分,第一个部分称为Local SLAM, 该部分通过一帧帧的Laser Scan建立并维护一系列的Submap,而所谓的submap就是一系列的Grid Map。当再有新的Laser Scan中会通过Ceres Scan Matching的方法将其插入到子图中的最佳位置。但是submap会产生误差累积的问题,因此,算法的第二个部分,称为Global SLAM的部分,就是通过Loop Closure来进行闭环检测,来消除累积误差:当一个submap构建完成,也就是不会再有新的laser scan插入到该submap时,算法会将该submap加入到闭环检测中。闭环检测的本质也是一个优化问题,该优化问题被表达成了一个pixel-accurate match的形式,解决优化问题的方法是Branch-and-Bound Approach.
- Cartographer本身是一个C++的库,虽然可以不依赖ROS的环境运行,但为了快速的上手,google还是提供了一个ROS环境下的封装cartographer_ros。

1.2 评价
我认为Cartographer这个库最重要的东西还不是算法,而是实现。
2D/3D的SLAM的核心部分仅仅依赖于以下几个库:
- Boost:准标准的C++库。
- Eigen3: 准标准的线性代数库。
- Lua:非常轻量的脚本语言,主要用来做Configuration
- Ceres:这是Google开源的做非线性优化的库,仅依赖于Lapack和Blas
- Protobuf:这是Google开源的很流行的跨平台通信库
没有PCL,g2o, iSAM, sophus, OpenCV, ROS 等等,所有轮子都是自己造的。这明显不是搞科研的玩儿法,就是奔着产品去的。前面说过,算法需要的计算资源少,而且因为依赖很少,因此几乎可以直接应用在一个产品级的嵌入式系统上。以前学术界出来的开源2D/3D SLAM算法不少,但能几乎直接拿来就用在产品上的,恕我孤陋寡闻还真想不出来。因此,我认为进入相关领域SLAM算法的门槛被显著降低了。
1.3 特点
- 工程化代码,依赖少,算法设计精妙,能在嵌入式主控上运行。适合产品级应用;
- 支持 ROS
- 优秀的软件架构设计,便于接入IMU、(单/多线)雷达、里程计、甚至为二维码辅助等视觉识别方式也预留了接口(Landmark)。
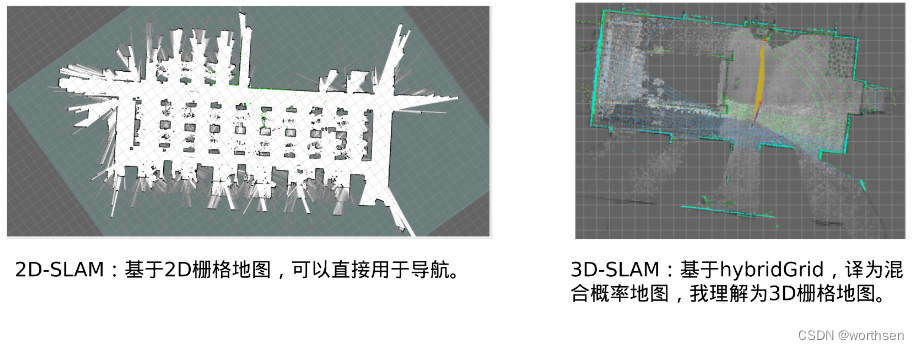
- Cartographer支持2D和3D激光雷达的输入,实现机器人定位,并构建栅格地图。
- 2D-SLAM:基于2D栅格地图,可以直接用于导航。
- 3D-SLAM:基于hybridGrid,译为混合概率地图。
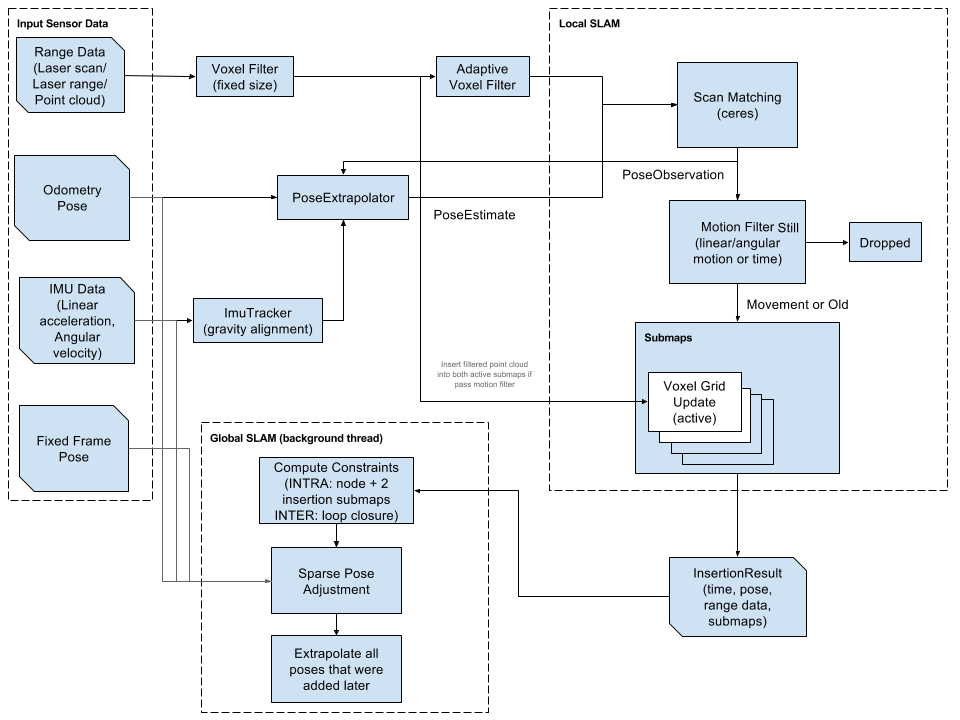
2 框架
官方
3 代码结构
heimazaifei 解读
https://www.cnblogs.com/heimazaifei/p/12392231.html
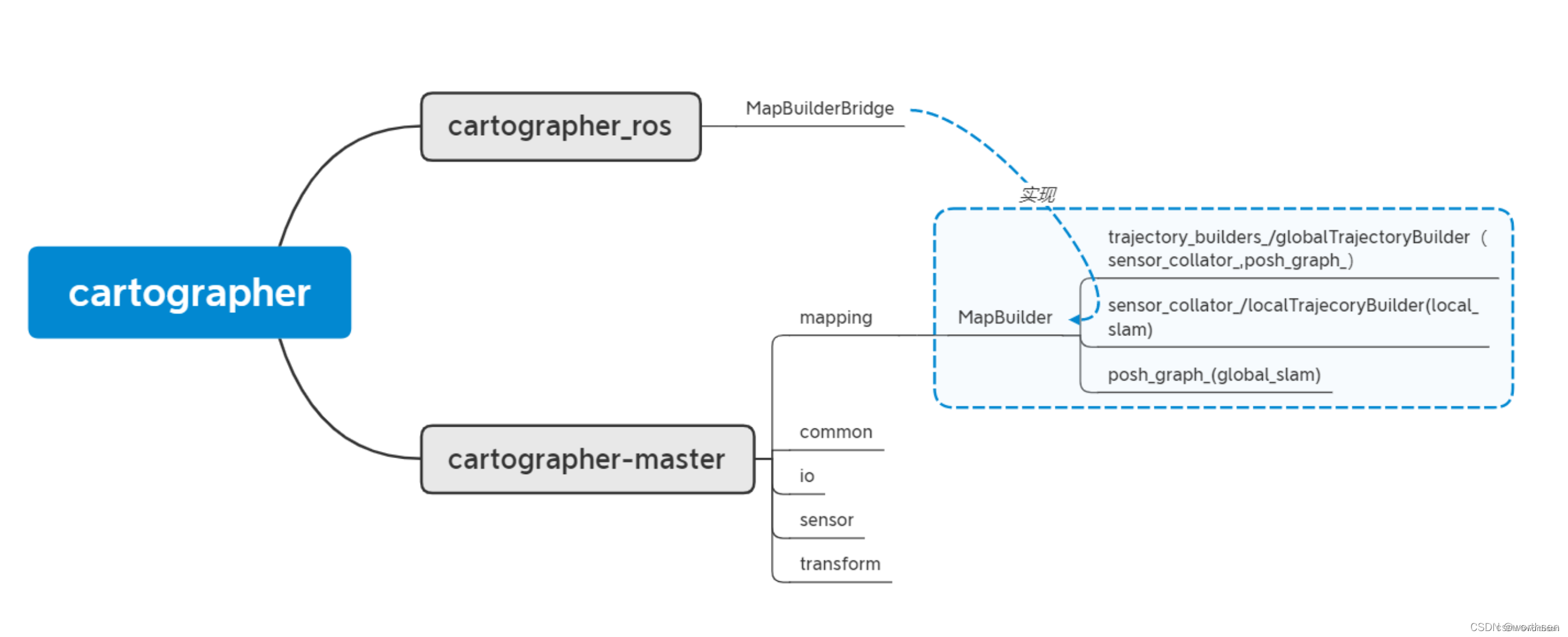
- mapBuilder:实现整个地图构建,包括前端local slam和后端 global slam。
- 轨迹(trajectory): 可以理解为一次SLAM 从起点到终点过程中的机器人行走轨迹,建图中可以通过startTrajectory和finishTrajectory控制。在轨迹生成的过程中,完成sensor到sumap的生成,以及pose_graph的构建。TrajectoryBuilder(globalTrajectory类)主要通过sensor_collator(localTrajecory类)和pose_graph构成 。sensor_collator实现局部地图构建,最终结果传递给pose_graph;
- 节点图(poseGraph):具体参考图优化的知识。简单理解图优化(如果没接触过图优化,下面估计看不懂,后续会详细讲):每个插入的激光和生成sumap,以及landmark(后续讲)都可以理解为图优化的一个节点,建图过程中,生成这些点之间的关系,这些关系便是图中的线,最终优化,就是调整点的位置,得到最优值。可以理解为PoseGraph主要实现全局优化(global slam)功能。
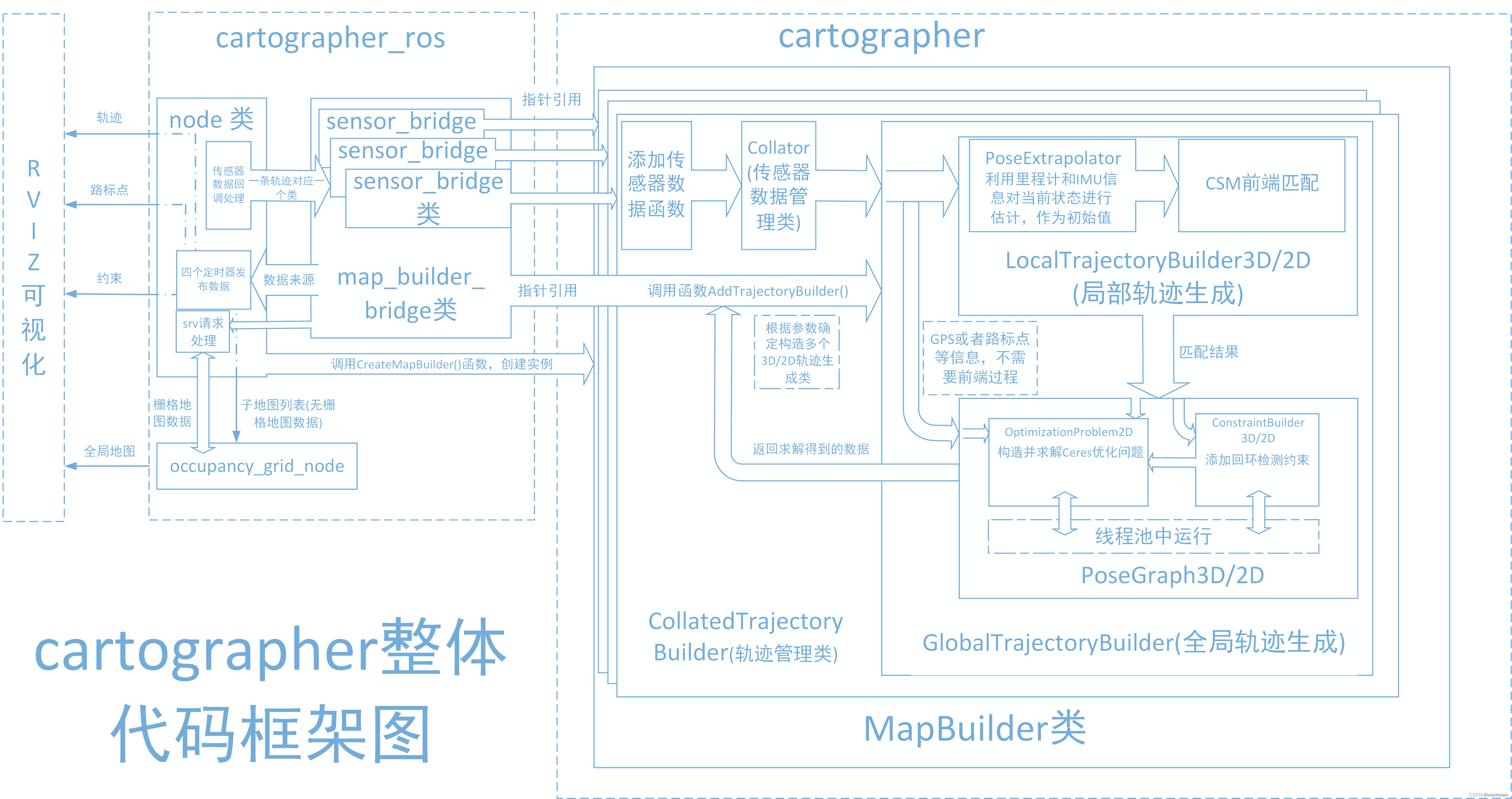
- 代码流程:最终代码运行通过ROS node 方式实现。node中对应topic和service订阅和发布等功能通过MapBuilderBridge类实现。MapBuilderBridge顾名思义,实现ROS节点代码和cartographer功能代码之间的桥接,也可以理解为对cartographer主体代码的接口封装。cartographer主体代码主要功能通过构建地图MapBuilder类实现。此外,MapBuilderBridge 还包含sensorBridge类,实现传感信息ros格式和cartographer自定义格式之间的转换,这些传感器主要包括scan,imu,odom,tf 等。
linyicheng 解读
https://github.com/linyicheng1/OpenSLAM-Notes/tree/main/cartographer-master
Xiaotu 解读
https://gaoyichao.com/Xiaotu/?book=Cartographer%E6%BA%90%E7%A0%81%E8%A7%A3%E8%AF%BB&title=index
cartographer_ros
| 重点 | 说明 |
|---|---|
| Cartographer的总体框架与安装试用 | 本文中,我根据自己的理解解释一下官方的系统框图,然后介绍如何快速的安装试用Cartographer,并简单的分析一下系统运行时的节点和主题。 |
| 官方的ROS封装——cartographer_ros | 本文中我们简略的查看了cartographer_ros的目录结构,分析了示例demo的launch脚本发现实际与定位建图相关的节点只有cartographer_node, 然后追踪编译系统了解到cartographer_node的入口main函数定义在node_main.cc中。 |
| 系统入口——cartographer_node | 我们了解到实际与定位建图相关的节点只有cartographer_node, 而其入口main函数则定义在node_main.cc中。 通过对该文件的分析,我们猜测对象node实际控制着系统的业务逻辑,而对象map_builder则用于完成建图。 |
| cartographer_node的外墙——node对象 | 本文中我们研读与node对象相关的源码,分析其构造函数以及订阅传感器消息的机制,浏览node对象的消息回调函数与服务响应函数。 将会发现ROS系统与Cartographer内核之间的信息交换基本上都是通过对象map_builder_bridge_来完成的。 |
| 通往Cartographer的桥梁——map_builder_bridge_ | 本文中,我们将要分析map_builder_bridge_对象的构造函数和一些重要的成员变量。该对象通过SensorBridge将ROS系统中的传感器数据转换到Cartographer中。 |
| 使用SensorBridge转换IMU数据 | 本文将详细分析ROS系统和Cartographer中IMU数据的表示方式,并研究数据转换函数ToImuData。最后会看到SensorBridge对象直接将转换后的IMU数据喂给了路径跟踪器。 |
地图构建器map_builder
实际完成地图构建的就是在系统运行之初所构建的map_builder对象。 它是Catographer的顶层对象, 为用户提供了一套统一的接口MapBuilderInterface。 封装了对象pose_graph_和trajectory_builders_来分别完成闭环检测和子图构建。还构建了一个具有固定数量的线程池,用于管理多线程。
| 重点 | 说明 |
|---|---|
| 初识map_builder | 本文中通过对map_builder对象的分析,我们可以看到它用对象pose_graph_在后台完成闭环检测和全局的地图优化,并用trajectory_builders_在前台跟踪运动轨迹完成局部的子图构建。 |
| map_builder的接口实现 | 本文中我们简单看了一下map_builder对象的接口实现,重点分析了AddTrajectoryBuilder函数,看到实际完成局部建图任务的是一个LocalTrajectoryBuilder2D类型的对象, 而与轨迹规划器相关的类型还有CollatedTrajectoryBuilder、GlobalTrajectoryBuilder、TrajectoryBuilderInterface它们应该说是一种封装。 |
| 连接前端与后端的桥梁——GlobalTrajectoryBuilder | 我们会在GlobalTrajectoryBuilder的成员变量中,看到了前端和后端的核心LocalTrajectoryBuilder2D和PoseGraph2D。 也将在它处理点云数据的接口中,看到该类是如何把前端的输出结果喂给后端的。 |
Local SLAM
实际完成Local SLAM的扫描匹配、更新子图的功能是在类LocalTrajectoryBuilder2D中完成的。 扫描匹配负责根据地图信息和激光扫描数据估计机器人的位姿,然后根据位姿估计将传感器数据插入到子图中。不断的重复这两个过程就可以得到一个较为准确的地图, 但是对于比较大的场景每次扫描匹配都对整个地图进行搜索的话,其计算量太大。出于实时性的考虑Cartographer只在一个较小的子图中完成这一更新过程,所以是Local SLAM。 在一些资料中被称为前端。
| 重点 | 说明 |
|---|---|
| Local SLAM的核心——LocalTrajectoryBuilder2D | 本文中,通过对类LocalTrajectoryBuilder2D的分析,大体上能够找到进行Local SLAM的一些核心要素以及实现这些要素的对象。 走到这里,我们终于看到了算法的一点影子了。 |
| 子图的维护与封装 | 本文中,我们顺着LocalTrajectoryBuilder2D中维护的子图对象active_submaps_,分析其数据类型ActiveSubmaps2D,以及封装子图的类Submap2D。 ActiveSubmaps2D使用了一种类似双缓存的机制,在旧图上进行扫描匹配,同时孕育着新图。 |
| 占用栅格的数据结构 | 子图也是一种占用栅格形式的地图,本文从ProbabilityGrid开始分析占用栅格的数据结构和接口。将会看到Cartographer通过查表的方式更新栅格单元的占用概率。 |
| 查找表与占用栅格更新 | 本文中我们分析插入器对象range_data_inserter_,介绍栅格单元占用概率的更新原理,并详细分析查找表的构建和使用方法。 |
| Local SLAM的业务主线——AddRangeData | 本文中我们将详细分析类LocalTrajectoryBuilder2D的成员函数AddRangeData,以及它直接或者间接调用的函数,具体完成了扫描匹配、更新子图的任务。 |
| 基于Ceres库的扫描匹配器 | 本文我们将简单的介绍使用Ceres库的套路。再分析扫描匹配器CeresScanMatcher2D,研究它是如何评价激光扫描数据与栅格地图的匹配程度的。 |
| 基于实时相关性分析的扫描匹配器 | 这个扫描匹配器的作用是初步优化位姿估计器输出的位姿估计,给Ceres匹配器提供一个较好的迭代初值。 由于可以通过配置文件选择关闭它,暂时不详细分析,等整体分析完Cartographer,介绍了闭环检测之后再补上。 |
Global SLAM
Global SLAM在后端为Cartographer提供闭环检测全局优化的功能。它的主要工作有三个方面:(1) 通过闭环检测构建子图与路径节点之间的约束关系,进而描述成一个位姿图。 (2) 然后通过SPA(Sparse Pose Adjustment)在后台进行优化。(3) 由于这个SPA优化是一个很耗时的过程,期间前端可能会产生新的子图和路径节点,所以在完成一次优化之后应当调整新增的路径节点的位姿估计。
| 重点 | 说明 |
|---|---|
| Global SLAM的核心——PoseGraph2D | 在Cartographer中的位姿图是由轨迹节点和子图构成的二部图,图中的约束描述的是轨迹节点与子图之间的位置关系。后端优化就是估计轨迹节点与子图在世界坐标系下的位姿, 最小化全局估计与局部估计之间的偏差。本文我们将研究一下PoseGraph2D的成员变量,以及与位姿图相关的一些数据结构。 |
| 位姿图的创建与更新 | 本文我们将详细分析位姿图PoseGraph2D的构造与更新过程。将看到PoseGraph2D通过对象constraint_builder_在后台完成闭环检测构建约束。 它还有一个工作队列来协调后台的任务。 |
| 约束构建器——constraint_builder_ | 本文中我们将详细分析约束构建器constraint_builder_,将看到它是如何通过MaybeAdd-WhenDone调用循环,借助线程池来组织闭环检测和约束的并行计算。 |
| 分支定界闭环检测的原理和实现 | Cartographer使用类FastCorrelativeScanMatcher2D具体实现了深度优先的分支定界搜索算法,该算法能够高效地进行扫描匹配,计算路径节点与子图之间的约束关系。 |
| 后端优化过程 | 本文我们将回到Global SLAM的系统框图,来了解经过闭环检测构建了子图与路径节点之间的约束之后,都做了些什么工作。 通过简要的分析后端优化求解器的数据结构以及基于Ceres库进行SPA(Sparse Pose Adjustment)的优化方法,来了解后端优化的过程。 |
赵锴 解读
SLAM学习笔记(十九)开源3D激光SLAM总结大全——Cartographer3D,LOAM,Lego-LOAM,LIO-SAM,LVI-SAM,Livox-LOAM的原理解析及区别
地图设计
- Cartographer的地图(map)以子地图(submap)的形式组成。
- 分为前端和后端。 前端:根据帧间匹配算法(scan-match),实时根据激光(scan)来推测累积的scan相对于submap的位姿。 后端:检测回环(发现在已到达的位置附近),修正各个submap之间的位姿。
- 根据代码可以判断,2D和3D基于的是同一套思路,但是在实现上有一定区别。 接下来结合2D和3D部分,对比介绍实现定位和建图的方法。
在介绍定位和建图思路之前,先介绍一下地图的更新方式:
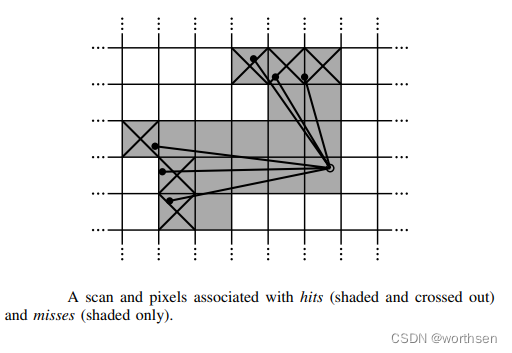
以方格代表地图块,内部存储数据用来表示被占据的概率。
发出一束激光,打到一个障碍物点,被打到的称为hit点,中间连线上的空区域,称为miss点。
2d和3d都是存储的这样的地图。3d相当于是3维的栅格地图。
宏观上:多次观测到,提升其概率。
问题是,如何用公式表达这个“多次观测”来实现“概率提升”?
o
d
d
s
(
p
)
=
p
1
−
p
odds(p)=\frac{p}{1-p}
odds(p)=1−pp
M
n
e
w
(
x
)
=
c
l
a
m
p
(
o
d
d
s
−
1
(
o
d
d
s
(
m
o
l
d
(
x
)
)
.
o
d
d
s
(
p
h
i
t
)
)
)
M_{new}(x)=clamp(odds^{-1}(odds(m_{old}(x)).odds(p_{hit})))
Mnew(x)=clamp(odds−1(odds(mold(x)).odds(phit)))
- p表示占据概率,当p=0.5时,概率比值odds=1,表示占据和空闲各占一半。 o d d s − 1 odds^{-1} odds−1表示函数逆运算。
- p h i t = 0.55 p_{hit}=0.55 phit=0.55代表该位置被激光打到一次的概率,第一次观测会被直接赋值。
- M n e w ( x ) M_{new}(x) Mnew(x)表示地图中 x 位置处的概率值。
举例:
- 初始时刻,栅格未知状态,激光第一次打到了位置 x 处,M(x)概率更新为0.55。
- 随后,激光第二次重复打到了同一个位置:
o d d s ( p h i t ) = 0.55 1 − 0.55 = 1.22 odds(p_{hit})=\frac{0.55} {1-0.55}=1.22 odds(phit)=1−0.550.55=1.22,
o d d s ( M o l d ( x ) ) = o d d s 0.55 = 1.22 odds(M_{old}(x))=odds_{0.55}=1.22 odds(Mold(x))=odds0.55=1.22
o d d s ( p h i t ) odds(p_{hit}) odds(phit) 和 o d d s ( M o l d ( x ) ) odds(M_{old}(x)) odds(Mold(x)) 相乘为1.484,再求函数逆运算,恢复出更新后的 M n e w ( x ) = 0.597 M_{new}(x)=0.597 Mnew(x)=0.597。 - 实际代码中,采用了多种工程技巧加速运算。包括:映射到整数范围,预计算,查表等方法,此处不深入展开了。
匹配方法
scan-scan: 这个意味着利用两帧激光数据(每帧激光束的数目相同),计算二者之间的变换。典型方法:ICP。
scan-map: 利用一帧激光数据和地图数据,找到激光数据在地图中的位置。
map-map: 利用一个子地图数据,在一个更大的地图中找到它合适的位置。
- 2D和3D的前端,Cartographer采用的是scan-map的匹配方法。
- 不管是2D还是3D,首先要有一个初始的位姿,在此基础上进行优化:
-
- 有IMU,则采纳其角速度积分作为初始姿态。不信任IMU任何加速度信息。
-
- 有里程计,则采纳里程计的线速度积分作为初始平移。
-
- 二者都没有,根据之前的运动做一个匀速的假设。
-
- 可以看出,cartographer的多传感器融合是一个松耦合,主要依赖激光来定位。IMU和里程计数据并没有被构建到真正优化的目标函数中。
一阶段解算
- 在得到了初始位姿以后,初始位姿要经过第一阶段解算:CSM(Correlation Scan Match 相关扫描匹配)——构建似然场。
- 即对原先的地图map进行一个高斯模糊,让它膨胀一些,然后把激光scan在一个搜索窗口内暴力匹配,计算得分。
注意,这里有两个问题:
1.得分怎么算?
如果scan的点落在障碍物模糊区域内,落的越多,得分越高。
2.地图不是无限大的吗,你怎么保证在搜索窗口里就能找到位姿呢?
因为有初始位姿。误差肯定在一个范围内而不会马上发散到很远,所以可以在一个位姿的窗口内,对位姿进行暴力匹配搜索。(初始位姿估计中,里程计数据不会突然激增;imu的加速度信息会漂移,但是算法对于imu加速度数据选择直接丢弃不看;而根据之前位姿匀速假设也不会飘走)
这时候我们就要考虑:
- 什么是位姿?位置+姿态。
- 对于2D SLAM而言,有三个变量,x,y,yaw角。 对于3D SLAM而言,有x,y,z,roll,pitch,yaw六个变量。
-
- 2dslam中,采用三层循环,(最外层为θ,减小sin和cos的频繁计算),对x,y,θ在给定大小的搜索窗口内进行穷举,计算最高得分的x,y,θ作为一阶段解算的输出位姿。
-
- 3dslam中,采用六层循环,对x,y,z,roll,pitch,yaw六个变量在搜索窗口内穷举,计算得分最高的作为一阶段解算输出位姿。
-
- 很显然,3d-slam的这种方式对于计算资源依赖较大,复杂度达到O(n^6)级别。因此3d-slam的CSM方法,作为一个配置选项,默认是不开启的。当然如果用户机器比较牛逼,也可以选择开启。
二阶段解算
我们可以看出,第一阶段CSM解算中,位姿在其中是一个离散的变量,通过暴力枚举获得输出结果;
但是暴力枚举也是存在分辨率的,例如:如果角度步长设为1度,但如果刚好真正的角度是5.5度,那么CSM只能搜索到5或6度,而无法进一步细化,逐步累积将会造成误差。 因此,引入第二阶段位姿解算:非线性优化。
E ( T ) = a r g m i n T ∑ [ 1 − M ( S i ( T ) ) ] 2 E(T)=arg \mathop{min} \limits_{T}\sum[1-M(S_i(T))]^2 E(T)=argTmin∑[1−M(Si(T))]2
S
i
(
T
)
Si(T)
Si(T) 表示把激光数据 S 用位姿 T 进行转换,
M(x) 表示得到坐标 x 的地图占用概率。
思路:S代表了激光击中障碍物,将激光点在机器人坐标系下的位置,经过T转换到世界坐标系下以后,应该尽可能的落在已有地图的障碍物上。
第二阶段的位姿求解,显然位姿在其中是一个连续的变量,通过梯度下降的方法求解目标函数。
由于地图是离散的,因此需要对地图进行插值处理,使地图也变成一个可以求导的连续变量,这样才能优化前述目标函数。
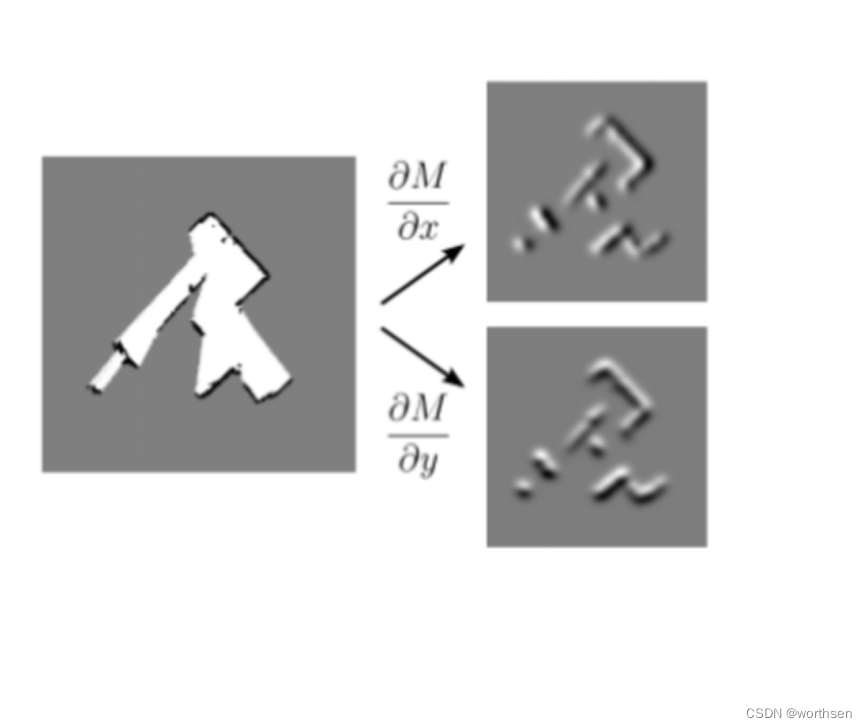
线性插值:已知数据 (x0, y0) 与 (x1, y1),要计算 [x0, x1] 区间内某一位置 x 在直线上的y值;
双线性插值本质上就是在两个方向上做线性插值。
双三次插值:更加复杂的插值方式,它能创造出比双线性插值更平滑的图像边缘。使用最近16个点插值。
Cartographer用的应该是这一种 并且采用Ceres自带的双三插值器。
阅读比较了代码,我判断2D和3D对于此部分内容基本相同。
- 2D:三个误差项:位姿转换误差+ 旋转误差+平移误差 ,后二者限制了旋转和平移的修改不能距离初始位姿太大。
- 3D:四个误差项:低分辨率位姿转换误差+ 高分辨率位姿转换误差+旋转误差+平移误差。低分辨率位姿转换误差权重低于高分辨率。
- 旋转和平移的权重也可以在配置文件中调参。
后端
Cartographer 在后端主要寻找回环,并根据建立的约束对所有的sumap进行统一优化。
回环检测目的是:检测当前位置是否曾经来过,即采用当前scan在历史中搜索,确认是否匹配。
为什么要有回环检测呢?原因有二:1. 已有地图时位姿初始化,不知道当前帧初始位姿,也就不清楚在地图中哪个位置,无法做定位。 2.有累积误差,仅靠前端递推,不进行修正的话,地图很容易变形。
因此接下来我们探讨两个问题:1.如何检测回环。2.检测回环后该怎么做。
如何检测回环
检测回环和前端的思路也比较相似,先通过穷举暴力匹配,再通过优化精细修正。
但是,前端的暴力穷举,是在有个初始位姿的基础上在一个小窗口内穷举。
后端重定位,没有初始位姿了,暴力匹配的范围变成了整个地图。
因此必须采用算法加速处理:多分辨率地图+分支定界操作。
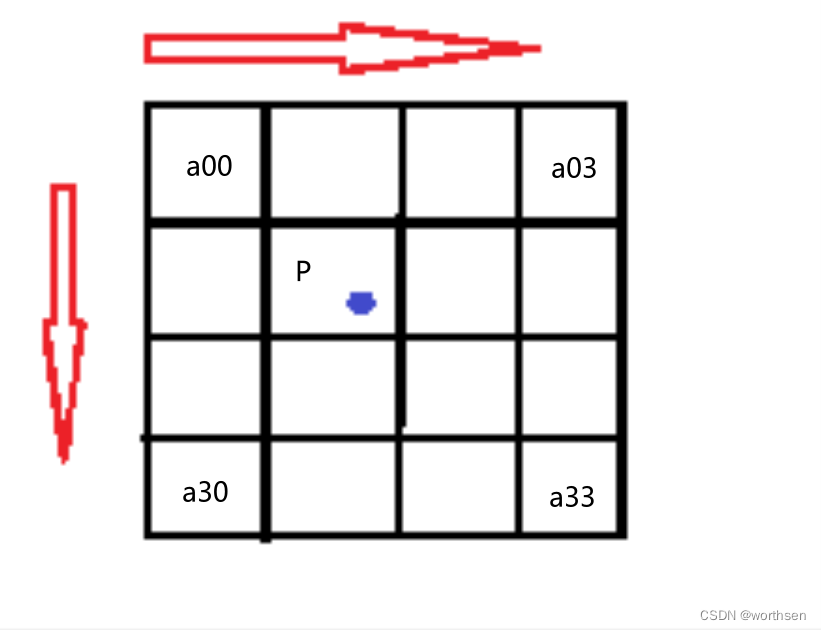
假设有一帧激光:
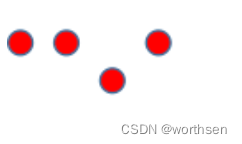
蓝色代表障碍物:
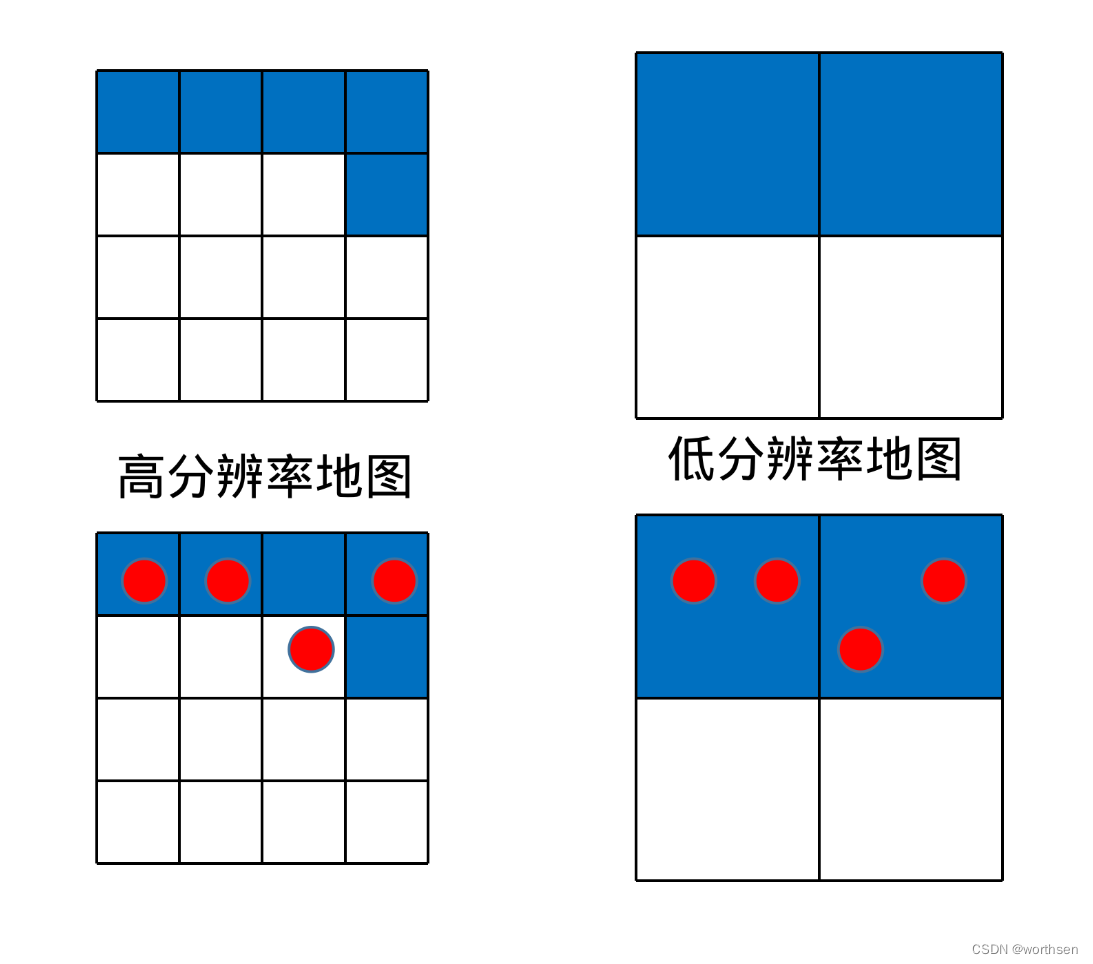
在高分辨率的地图上,四个点命中3个;
在低分辨率的地图上,四个点全部命中。
激光在低分辨率的地图上匹配情况: 代表得分的上界 (再往精细展开,匹配得分只能更低,不能更高)
在高分辨率的地图上匹配情况: 代表得分的下界( 再往粗略缩放,匹配得分只能更高,不会更低)
分支定界:
- 先把整个地图中的一个区域展开到底(最高分辨率),得到一个匹配分数(得分下界);
- 然后把其他区域不展开,算匹配分数。(得分上界)
- 如果低分辨率区域的得分上界,还没有已展开到底的高分辨率区域的下界高,这个低分辨率区域就不再展开了,统统丢掉不要。
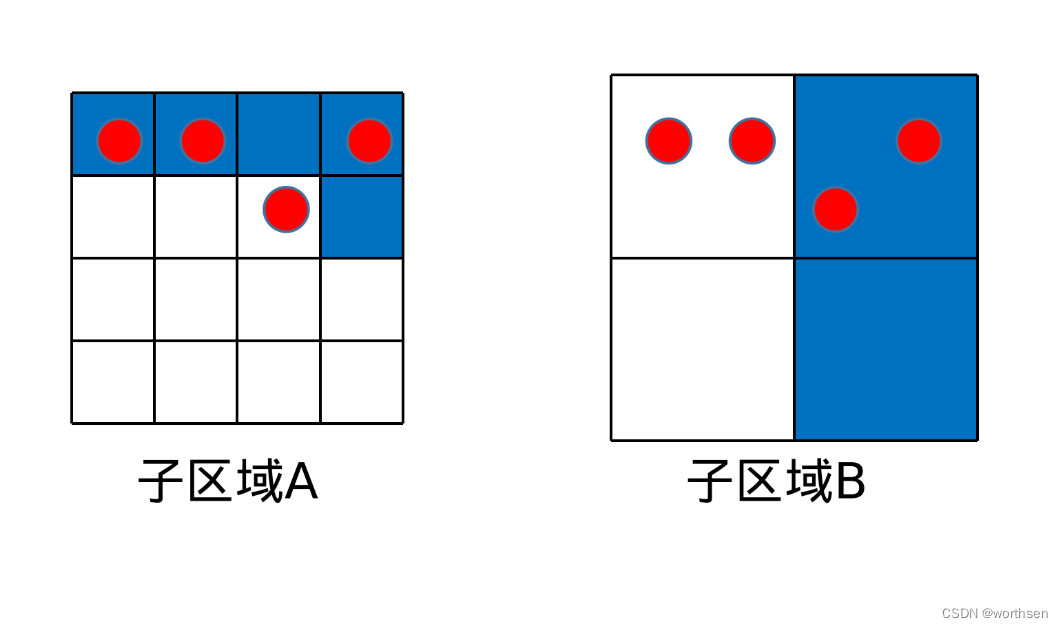
A图四个命中3个,得分75;
B图四个命中2个,得分50;
那么激光打在子区域A的可能性就要大于B,因此B就无需继续展开成更精细的地图了。
- 2D-slam的思路比较简单
-
- 前端:小范围内穷举+非线性优化方法修正位姿。
-
- 回环检测:大范围内穷举(利用分支定界加速) +非线性优化修正位姿。
- 3D-slam有所不同。
-
- 前端的暴力匹配方法,是直接6层循环暴力枚举的,因此配置文件中默认不开启,而是在初始通过IMU、里程计等预测位姿基础上,直接非线性优化修正位姿。
-
- 回环检测:大范围内6个循环穷举+分支定界的话,小范围都嫌慢,大范围更别提。 直接对位姿非线性优化? 1.没有初值,会算到猴年马月。2.会落入局部最优值。
这块没有论文发表,是我个人的理解,可能在细节上不够准确,这段比较复杂,仅供参考。(欢迎纠错,有错误我将立即更正)
- 首先,Cartographer3D用IMU确定重力方向,让要匹配的点云的 Z 轴方向和重力方向对齐。(Cartographer3D必须使用IMU) 这样之后就无需搜索 roll 和 pitch 两个方向的旋转,仅暴力搜索沿 z 轴旋转的 yaw 角方向即可。这样暴力匹配的范围,就从x,y,z,roll,pitch,yaw 六个维度降为x,y,z,yaw四个维度。
- 相比2Dslam是把点云投影到地图,计算匹配。3d-slam在yaw角搜索维度上,不是直接对庞大的点云进行旋转匹配的,而是通过直方图匹配,设定阈值,先过滤了大量的不匹配yaw角之后,再暴力搜索x,y,z(仍然用分支定界加速)。
1.首先,在z轴方向对点云切成n个片;
2.对每个切片中的点,求解质心;
3.计算每个点,与质心连线,和x轴所成的角度,并依据角度排序。
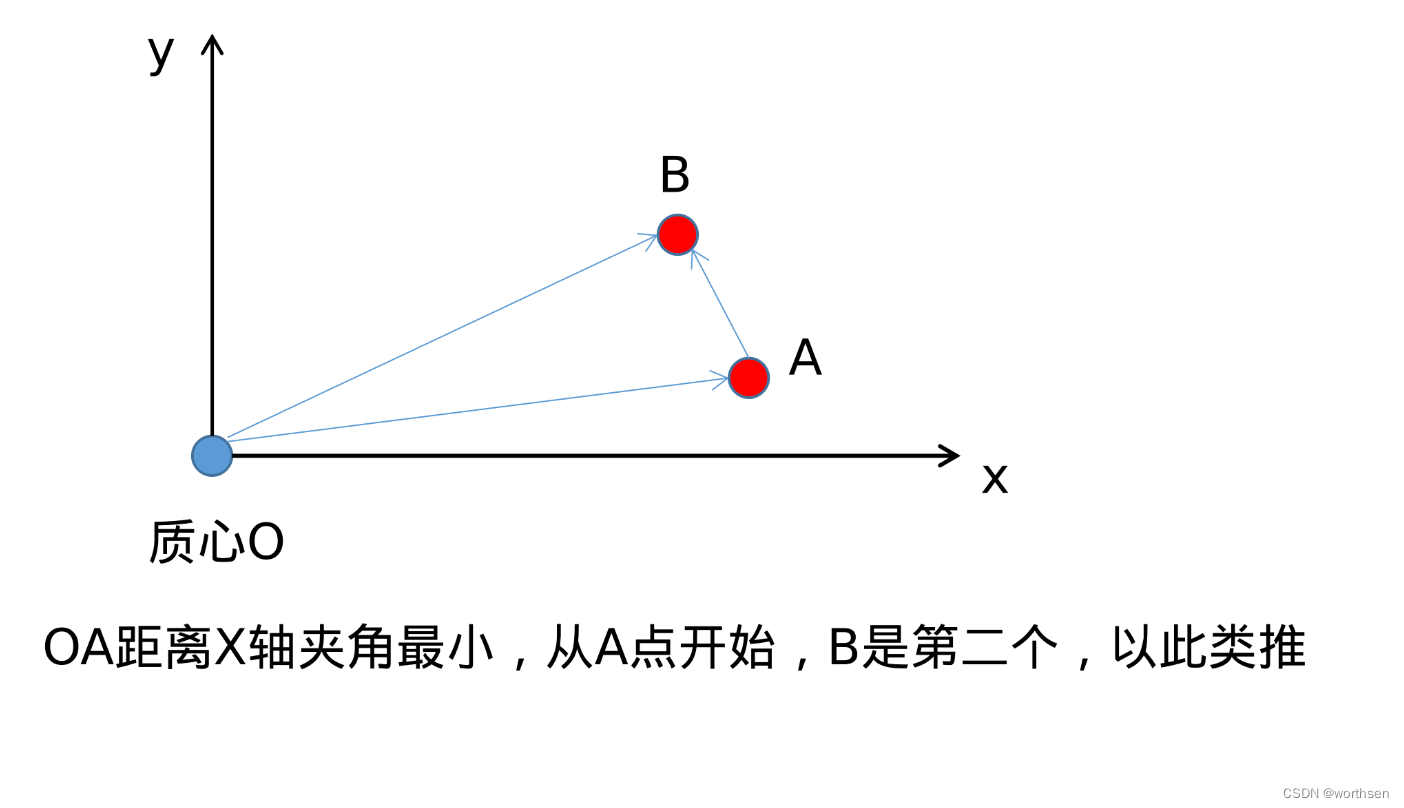
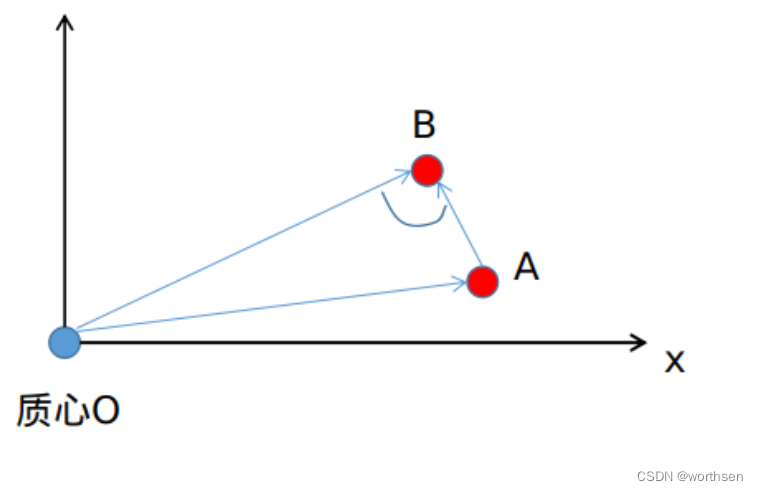
之后: 1. A点作为参考点:计算AB和x轴的夹角,映射到直方图。 相当于:把点云分类,分成size个类, 分类标准为当前点B与参考点A连线AB和x轴的夹角。 2.再计算一下质心到AB的夹角OBA,作为直方图中这个点对应的权重。
B点被映射到某一个分类中,分类依据为AB和X的夹角;(AB代表“参考点与当前点”,当参考点B距离A很远时,参考点则会被重新选择) B在此分类中的权重,由角OBA的大小决定(变换至-90~90度,主要是想看垂直程度)。
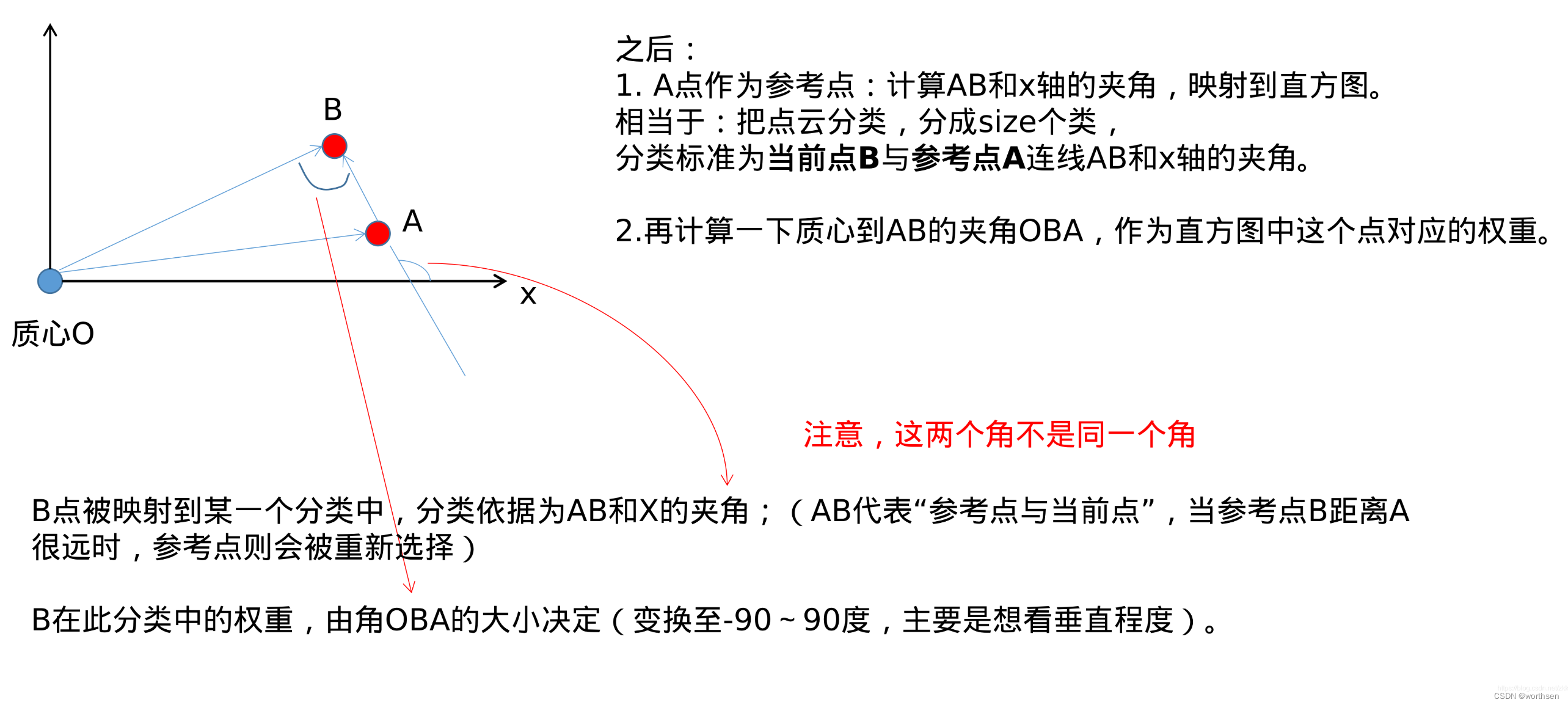
我们可以知道,一圈360度激光,求质心实际就是激光发射器的位置, OB和AB的夹角越垂直,证明一束激光OB,更接近垂直的打到了AB构成的障碍物平面上,反射强度更高,更可信。越不垂直,说明激光OB以侧面的形式打到平面AB上,探测误差可能更大。
回到原先问题上: 刚刚准备在yaw,x,y,z四个维度对当前点云在地图中暴力搜索一个位置初值; 提取直方图的目的,相当于是对当前点云进行一个降维,提取特征。 根据直方图中提取的特征(根据切片上每个点与参考点的直线AB与x轴的夹角分成n个类,类的值是OBA的大小), 和历史数据进行匹配,筛选掉一批不够阈值的yaw角。
- 2d-slam在yaw角的搜索上,是直接枚举yaw角,投影点云,判断点云和地图匹配程度。
- 3d-slam则是先根据当前时刻的点云,通过直方图的形式计算一个特征,然后枚举依次yaw角,对特征进行旋转,然后和历史特征进行匹配,筛掉一批yaw角,拿剩下的yaw角再进行yaw,x,y,z维度的枚举。
细节问题:
二维激光点云或者三维点云,拥有xy或xyz三个坐标。因此点云可以被旋转。但是一个抽象的特征怎么进行旋转?
答:直方图横坐标代表AB和机器人坐标系x轴的夹角,如果对点云进行旋转,也就代表了对这个夹角进行了旋转。旋转点云,对应其实也就是对整个直方图的横坐标向右平移。其实旋转的本质上仍然是点云。
因此整个流程为:
1.把当前时刻的点云直方图进行旋转,代表得到一系列的候选直方图;
2.候选直方图和地图中各个位置的点云直方图进行匹配,计算余弦距离。(直方图可以用一个向量表示,向量的余弦距离就是向量的夹角。)
3.筛掉未达阈值的候选直方图,其对应的yaw角直接丢掉,不进行x,y,z三个方向上的展开。
4.达到阈值的yaw角,进入深层循环:对点云进行xyz三个方向的平移,和三维栅格地图计算匹配得分,仍然遵循分支定界,计算上界和下界。(仅有高、低两个分辨率)
补充理解(仅供参考):
1.为什么yaw角上的特征不满足,这个候选位姿就可以丢掉,就不需要再展开x,y,z了?
因为特征的匹配方法对距离不敏感。 特征主要依赖角OBA,以及AB和X轴的夹角。 在BO的延长线上任意一点,对应的特征都完全相同。
2.在直方图匹配中,需要对当前时刻点云提取直方图特征,并和历史地图匹配。然而只有点云才能提取直方图,而Cartographer3D使用的是三维栅格地图。历史地图中的点云从哪里来?
- 根据源码我推测,程序在各个submap中的每个位姿节点里存放了特征直方图。
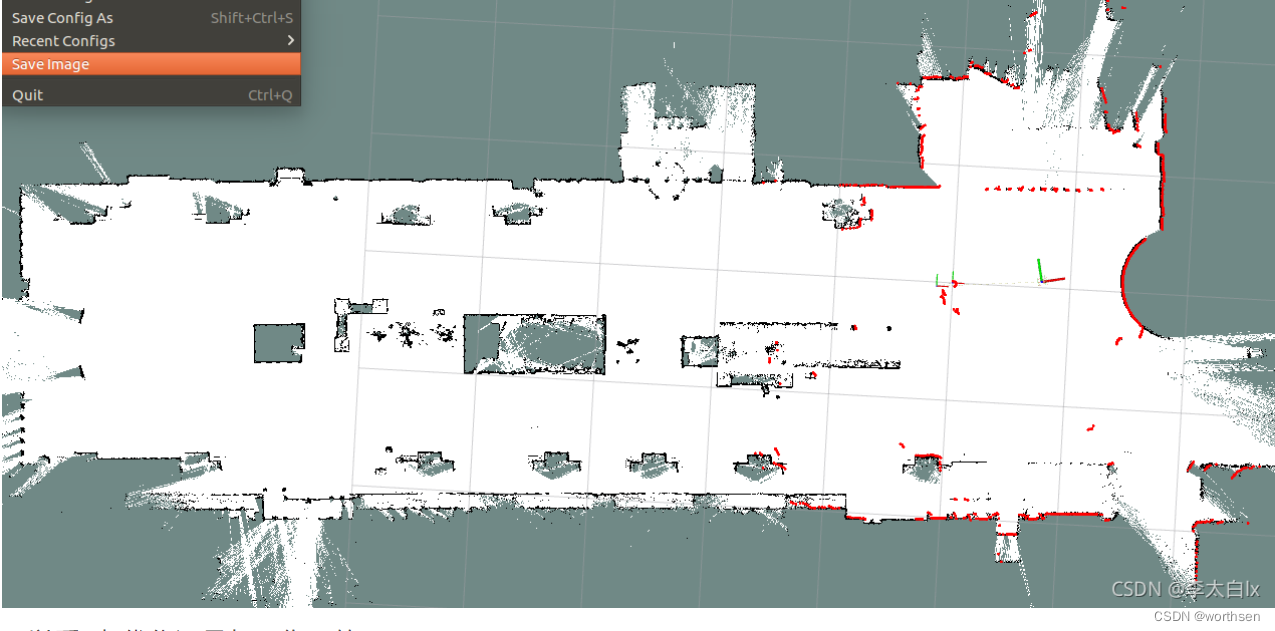
- Cartographer可以三维建图,但是是以rosbag的形式把传感器数据保存下来,再把地图以二进制文件pbstream保存以后,离线调用assets_writer_backpack_3d.launch文件,需要同时提供传感器数据bag和地图pbstream文件,才能离线三维建图。 (关于这点,详见SLAM学习笔记(十八)3D激光SLAM——Cartographer第一视角点云可视化配置与使用方法(最新) )
- 因此,我推测代码内部应该把历史点云丢掉了,因此离线点云建图除了需要已经建好栅格地图文件以外,还需要才需要提供原始传感器数据(包含每一时刻获取的点云)。
- 如果想要获取真正的三维栅格地图,应该需要定位并且修改源码,找到数据在代码中的存储位置,把submap中的三维栅格地图从protobuf数据流中修改并解析出来。
检测回环后该怎么做:优化问题
回顾:在Cartographer前端中,不断维护的是scan和submap之间的位姿。整个的map是由一个个submap组成的。
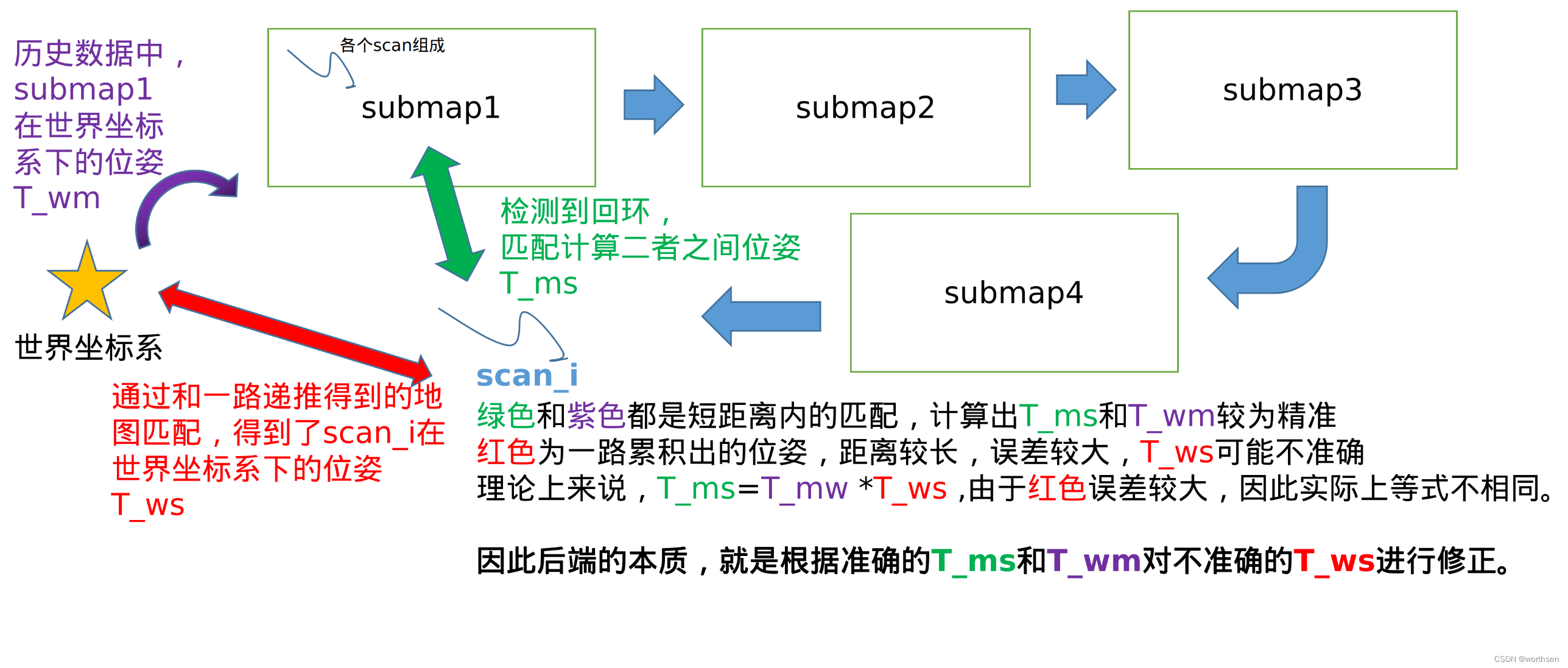
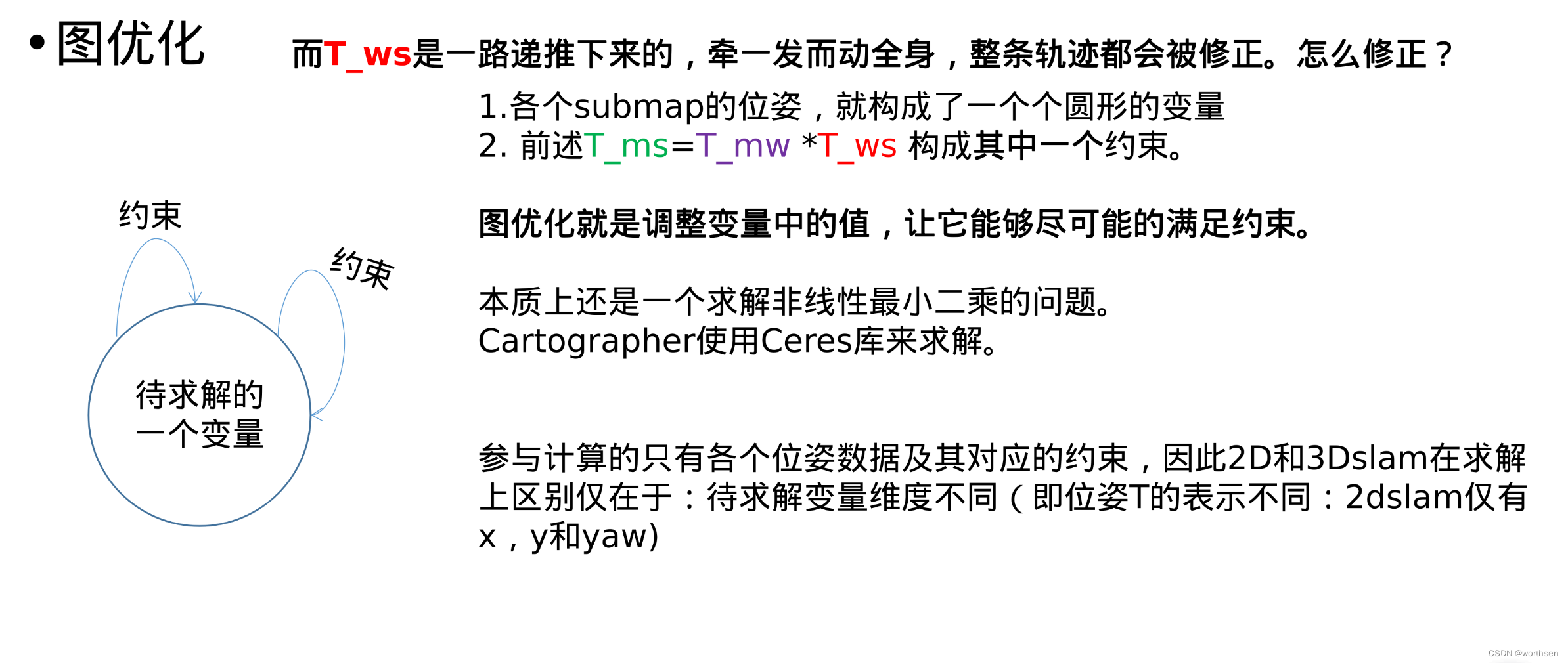
回顾:重定位中的位姿
两个问题:
1.前端后端均采用了暴力枚举的方式,这样做是否科学?(虽然各自以不同方式加速,但是感觉暴力搜索并不是一个聪明的做法)
2.导入一个已知地图,机器人出现在该地图的某个区域,初始位置未知,随后很快确定了自己的位置,在这个重定位的计算过程中,机器人的位姿变化,到底是离散的,还是连续的?
离散:从一个位置跳变到另一个位置; 连续:从一个位置,逐渐平滑的过渡到另一个位置。
假设现在有一个如下的曲线图:
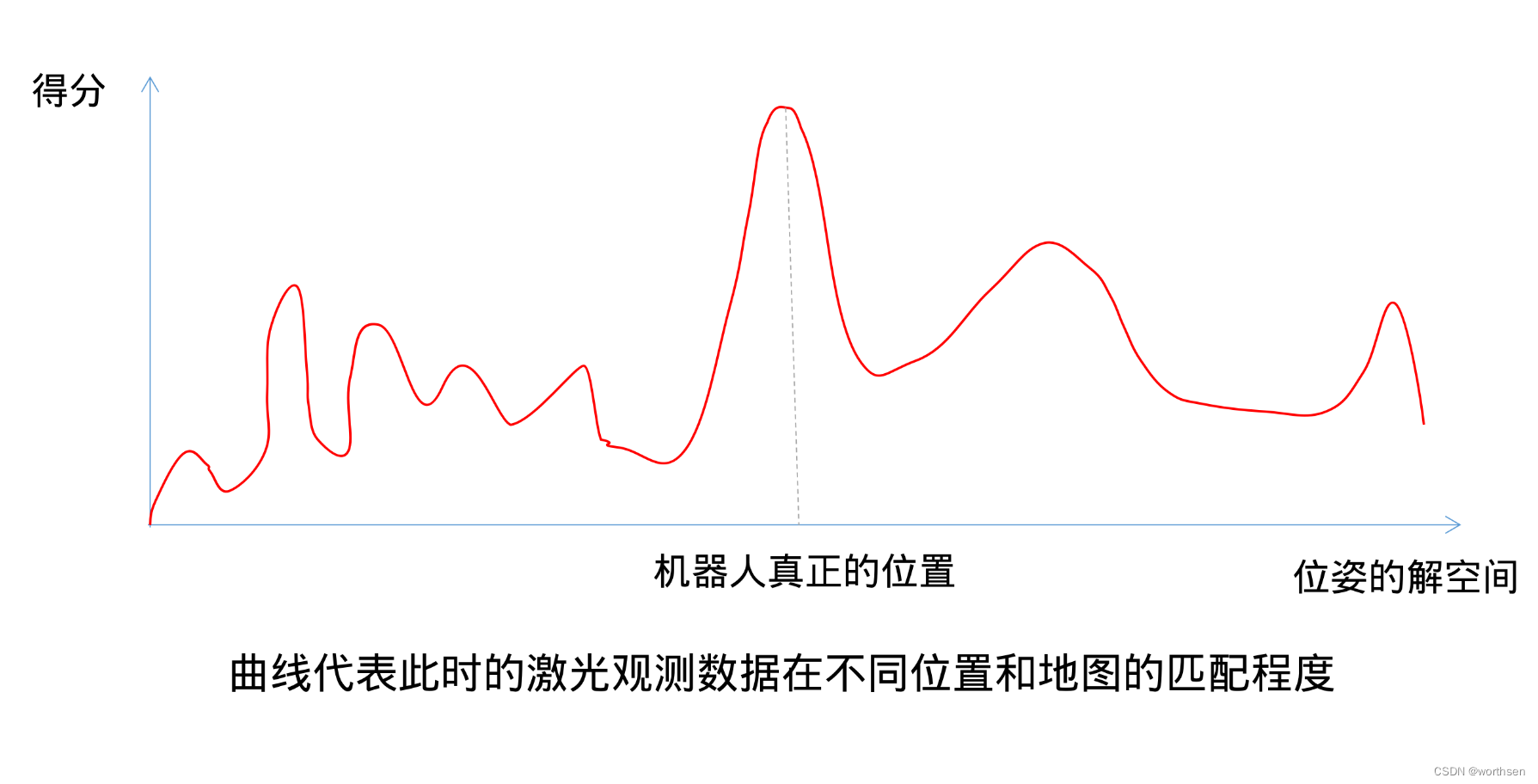
我们可以构成三点共识:
1.已有地图不是无限大的,所以位姿的解空间范围有限;
2.机器人真正的位置处,激光和地图匹配得分最高;
3.实际的曲线可能有着很多的局部最优值。然而,一个局部最优值所在位置,往往和机器人真正的位置天壤地别。
采用随机梯度上升,则大概率落入局部最优值。
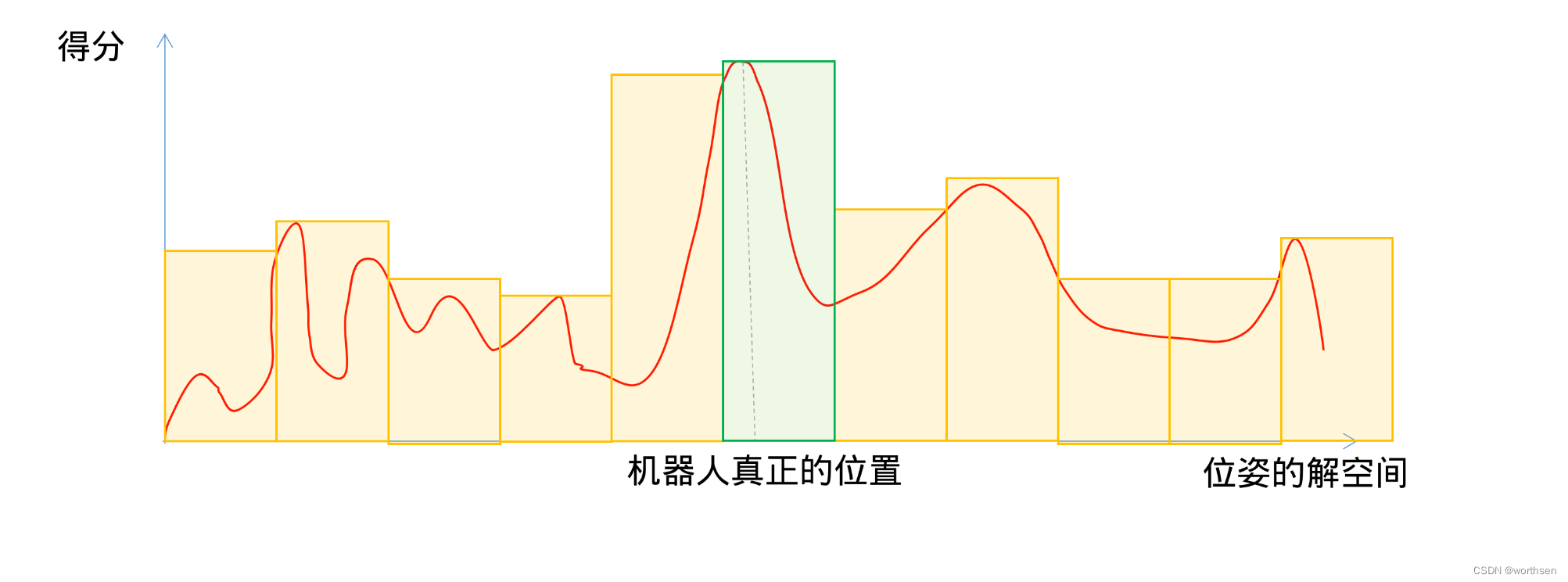
因此,必须把整个解空间全都搜索完一遍,才能知道哪个区域上界最高,再从这个区域出发优化,找到真正的最优得分。——采用多分辨率地图,分区域枚举,确定最优解在绿色范围内,再从绿色范围内出发,非线性优化,梯度上升,找到真正的位置。
回答上面的问题:
1.暴力搜索是否科学?从传统求解角度来说,是的。否则会落入局部最优值。但是目前有人也用深度学习的方式去做,主要集中在视觉SLAM中,因为相对于只有距离特征的点云,图像有更多的特征。
2.在重定位过程中位姿变化,是先离散搜索区域,再连续精准确定。
4 论文分析
Real-Time Loop Closure in 2D LIDAR SLAM
算法原理–cartographer–Real-Time Loop Closure in 2D LIDAR SLAM
W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop Closure in 2D LIDAR SLAM, in Robotics and Automation (ICRA), 2016 IEEE International Conference on. IEEE, 2016. pp. 1271–1278.
扫地机器人增强位姿融合的Cartographer算法及系统实现
https://www.modb.pro/doc/63227
曹晶瑛:石头科技研发总监? https://www.linkedin.cn/incareer/in/%E6%99%B6%E7%91%9B-%E6%9B%B9-4b7a48133
其它作者西电的。
5 安装调试
5.1 install with ROS
ROS调测Cartographer,往上教程太多,此处略。
李想–从零开始搭建二维激光SLAM
雷达对比
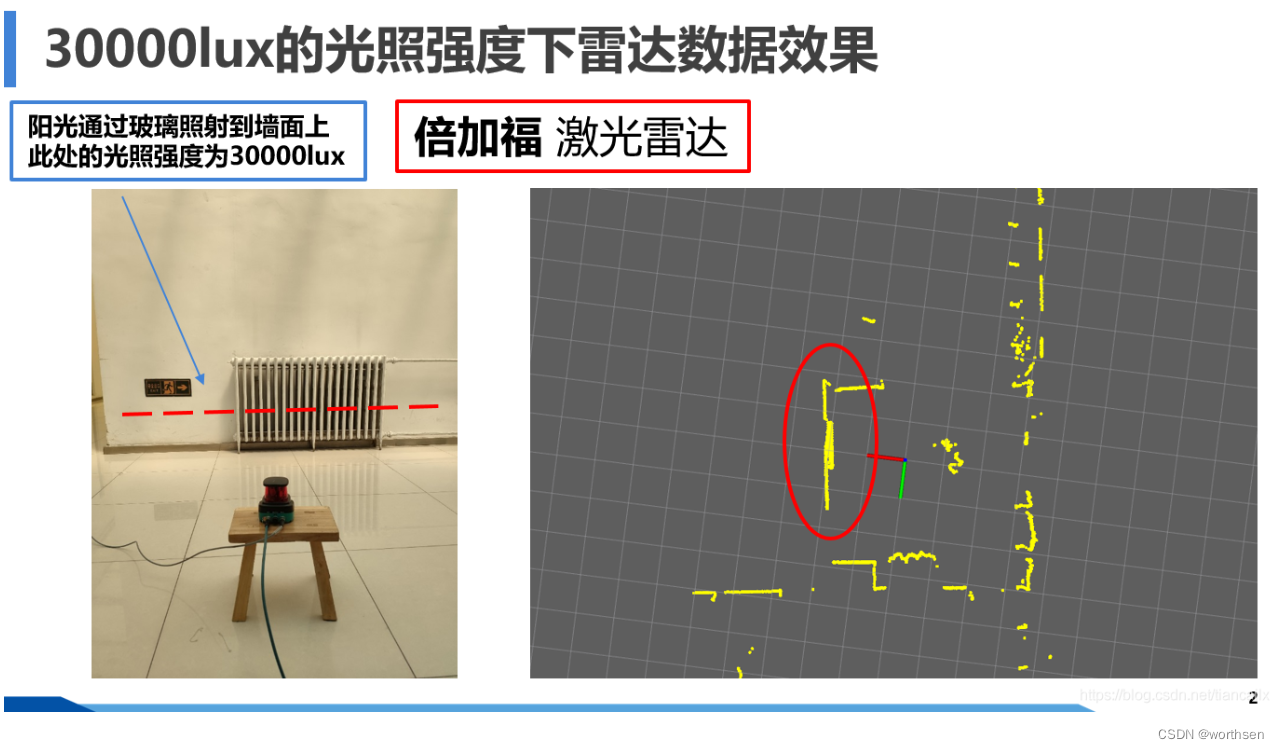
2022年,工业AGV使用的一线雷达,国产的导航雷达价格卷到2000级别,避障雷达到1000以下。(from worthsen)
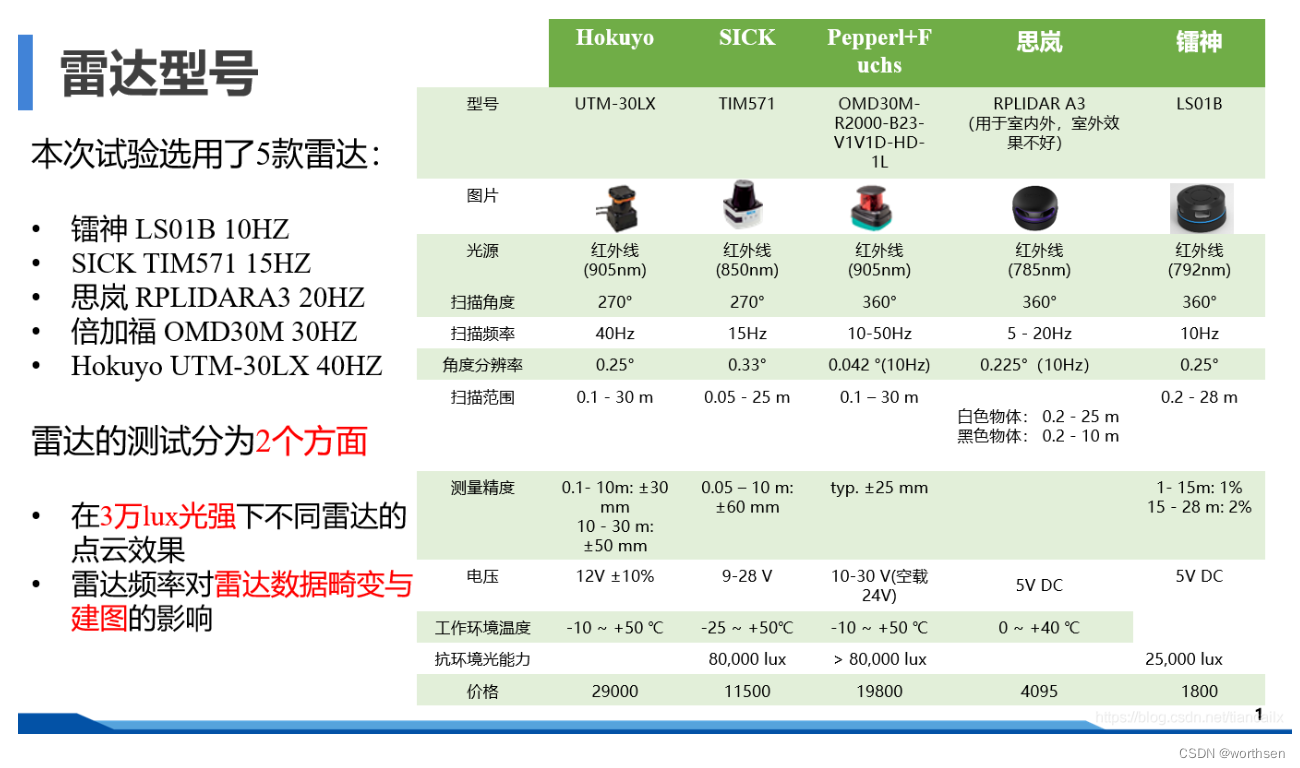
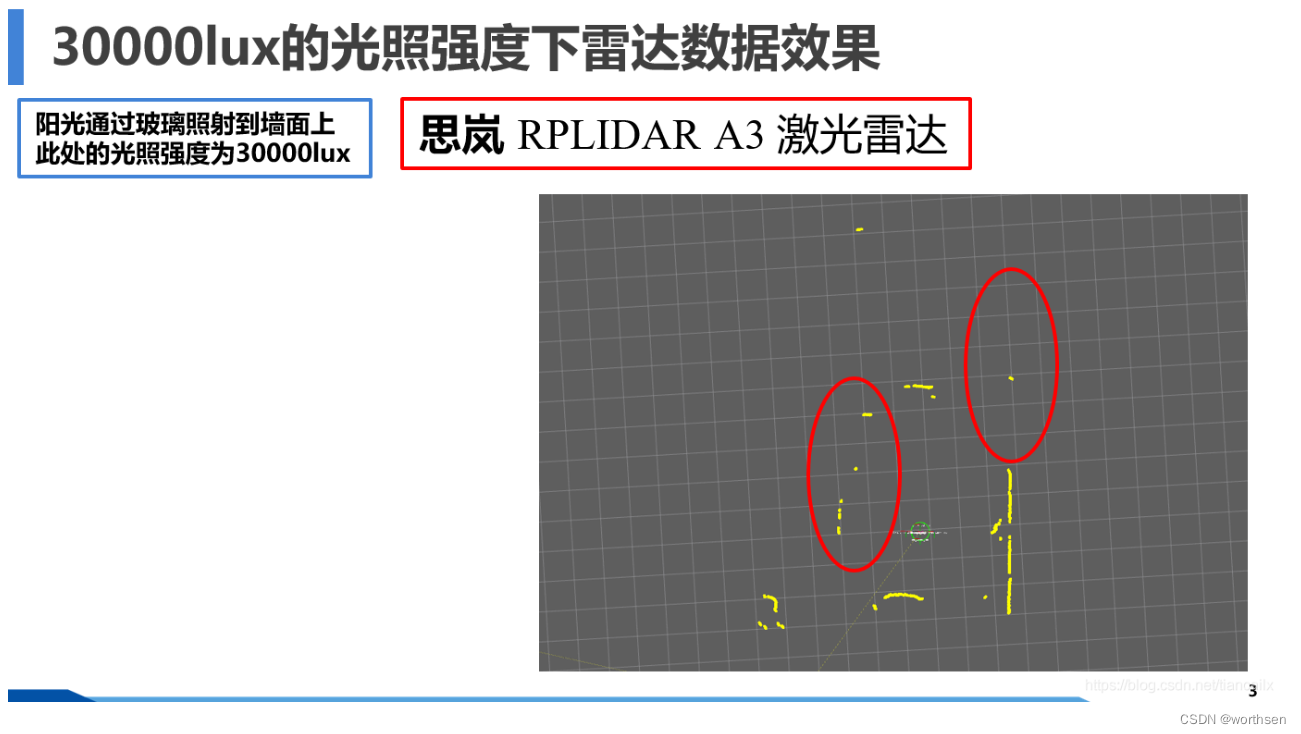
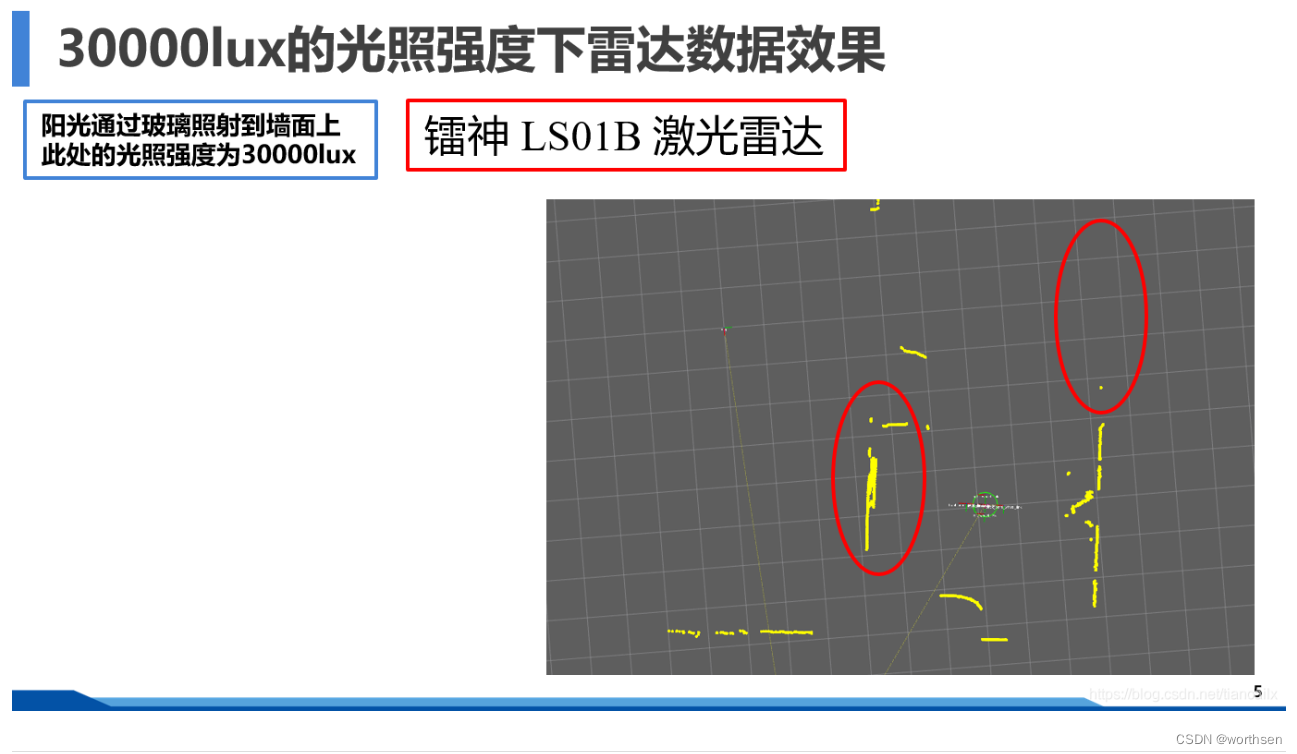
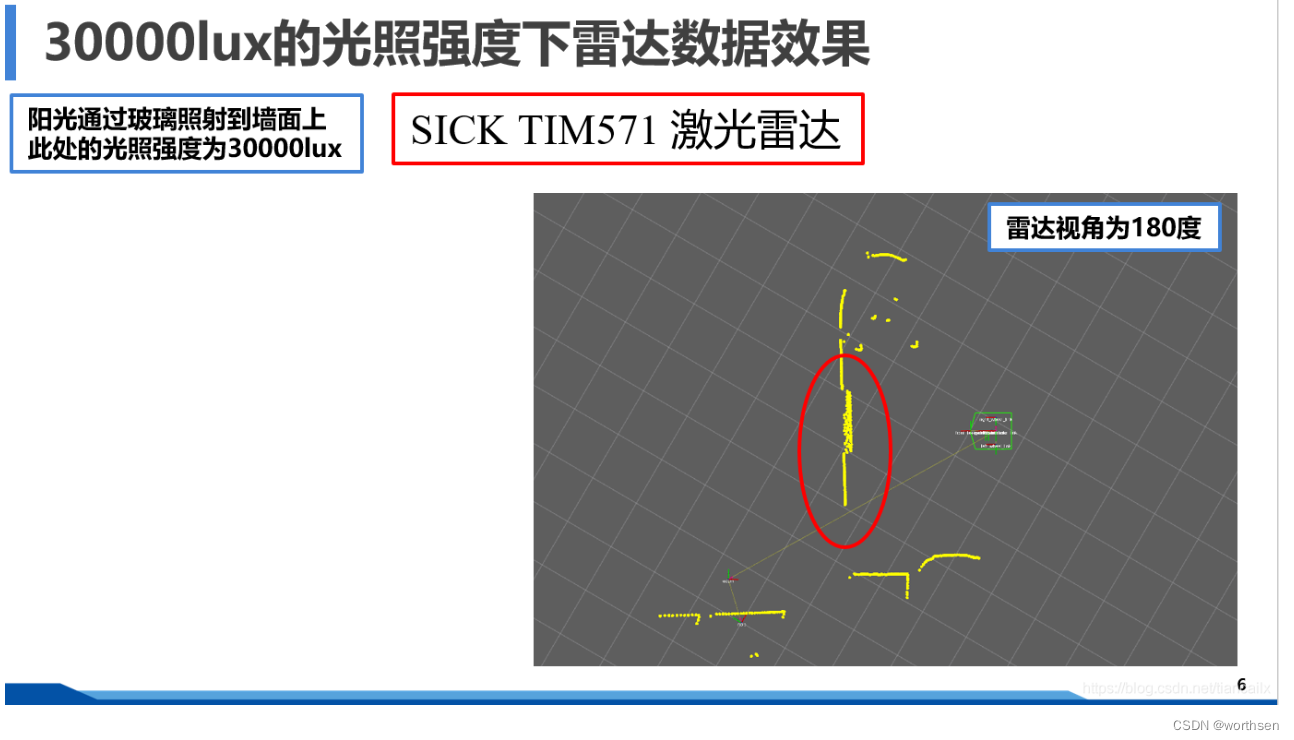
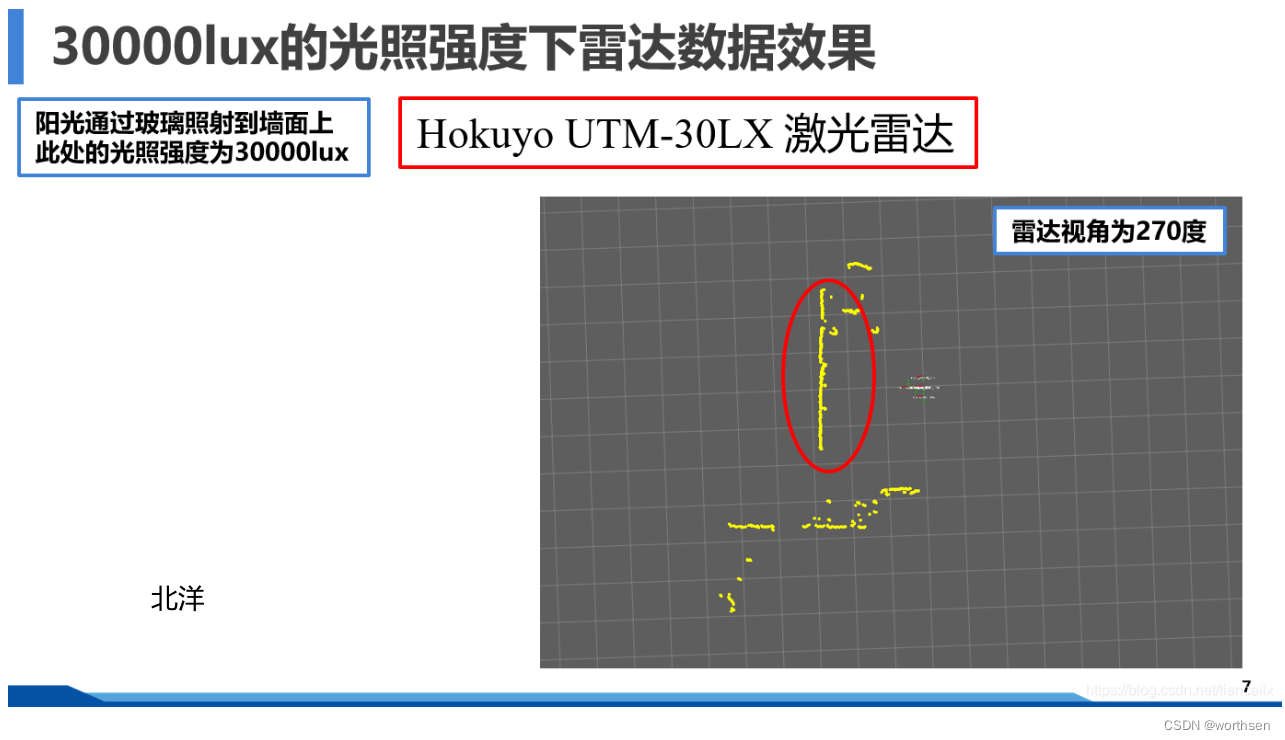
30000lux光强下的点云效果
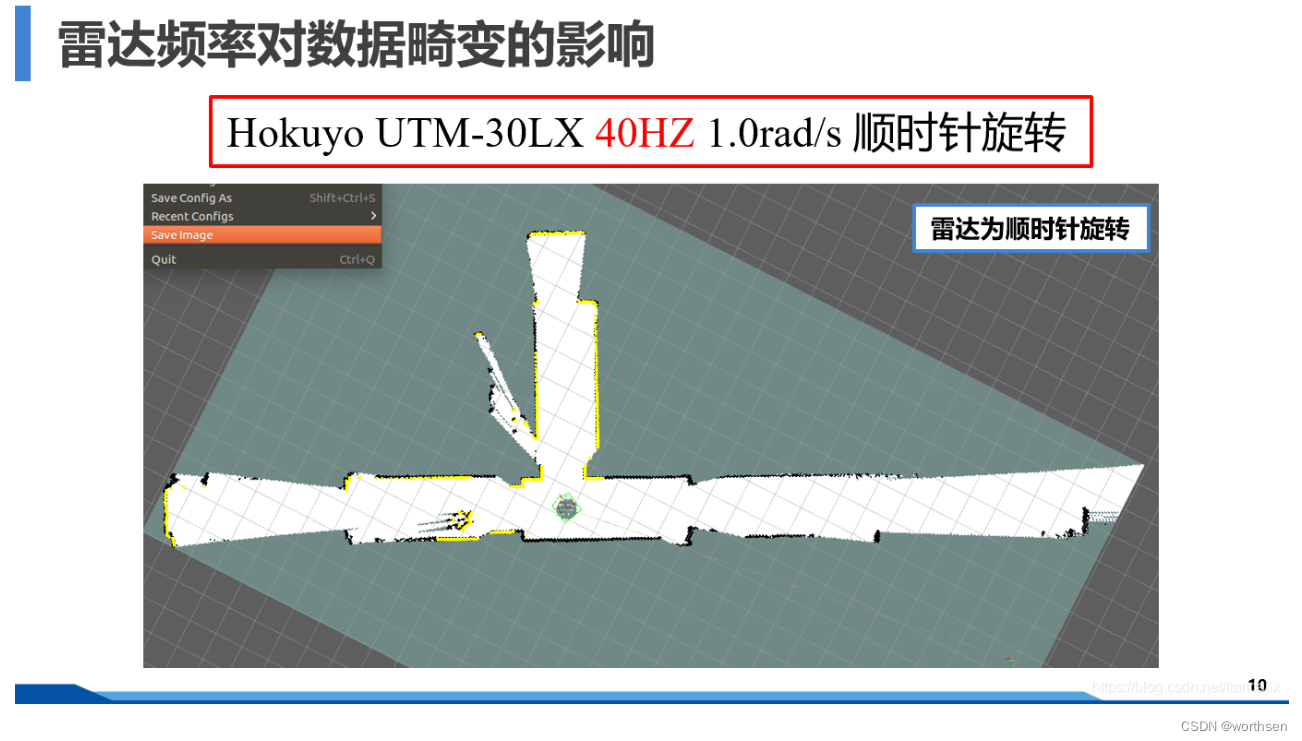
雷达频率对数据畸变的影响
雷达数据因运动产生畸变的原因:
激光雷达数据不是瞬时获取的,雷达每旋转一定角度获取一个扇面的数据,然后逐次旋转获取一帧数据(360°、270°等)。
当雷达频率太低时,激光雷达的一帧数据会随着雷达的运动逐渐产生偏差。
边建图边旋转,通过生成的地图来判定雷达是否产生了畸变。当雷达数据与地图对应不上,或者是产生的地图出现畸变,就说明雷达数据产生了畸变。
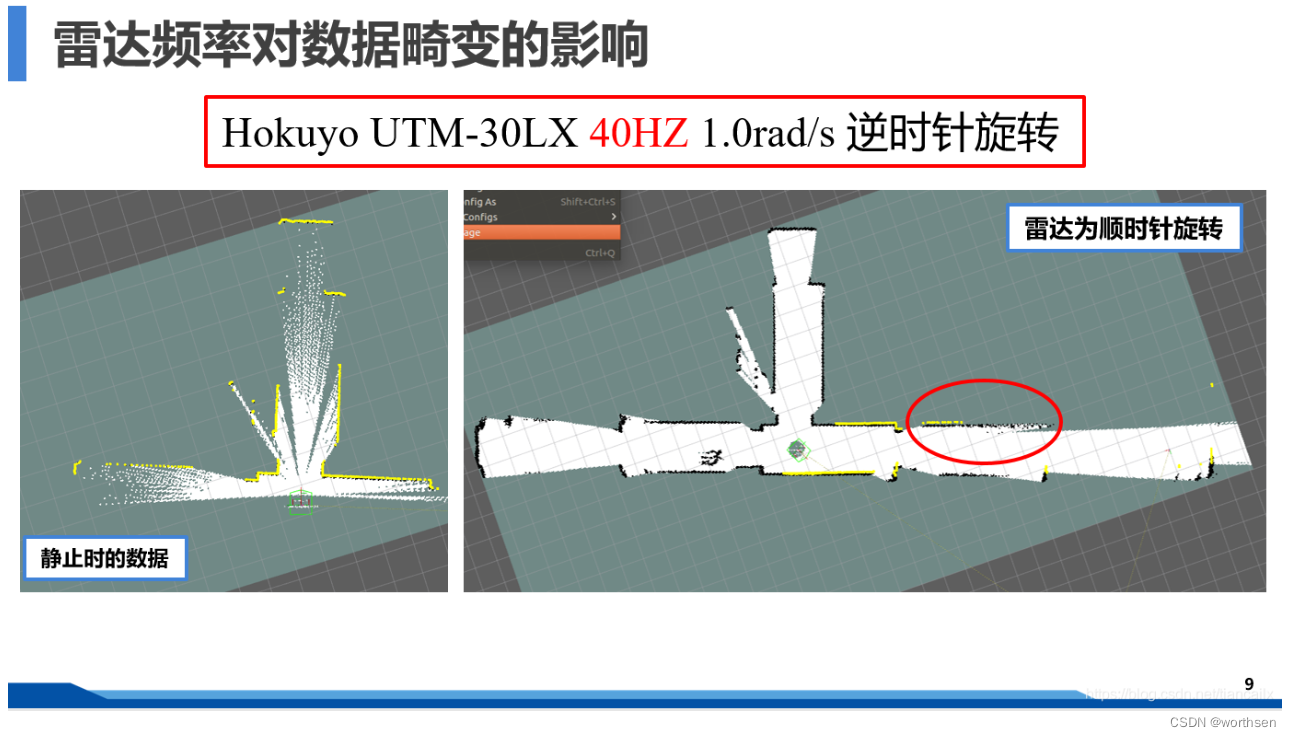
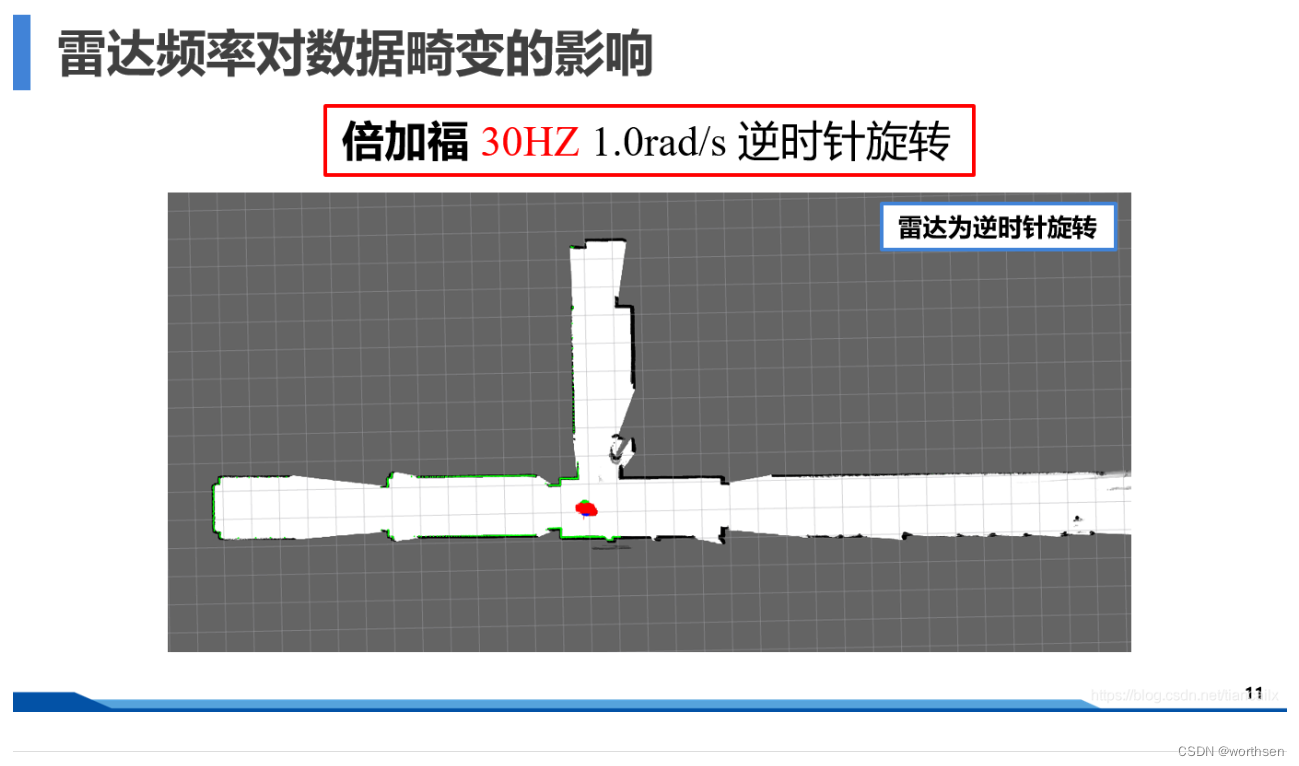
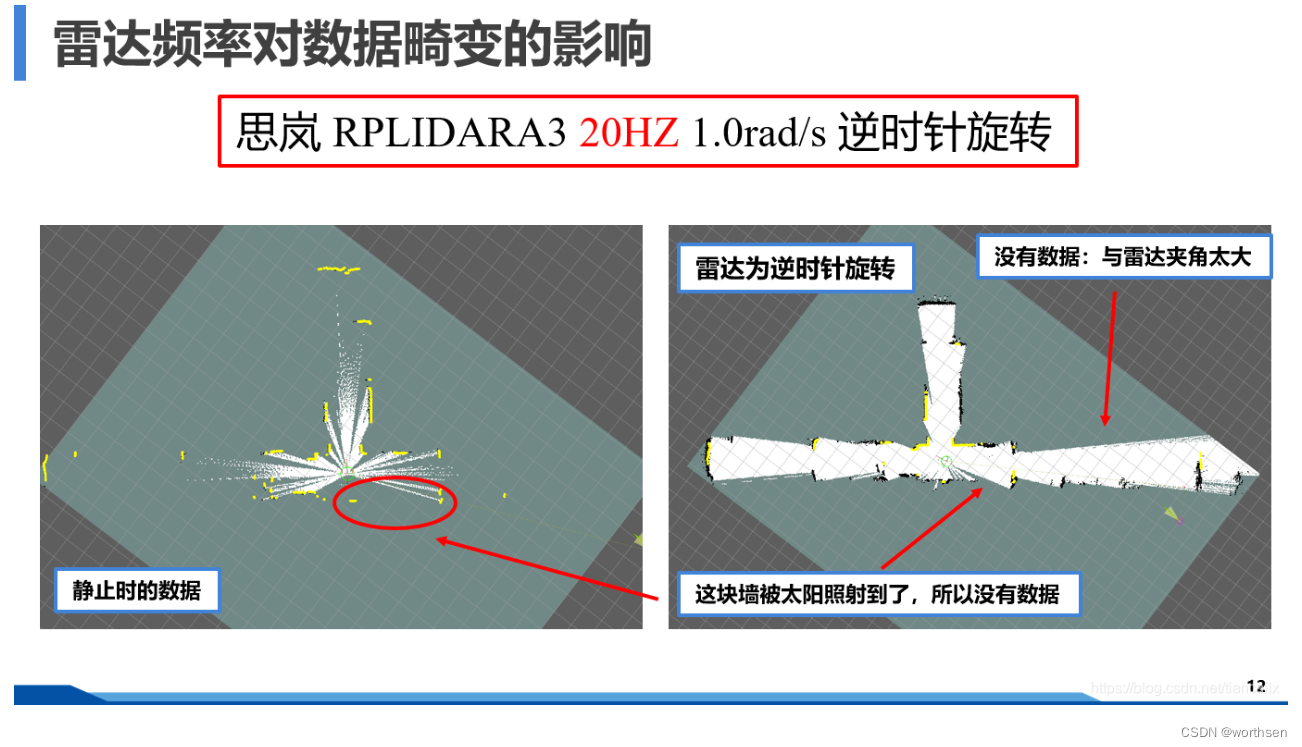
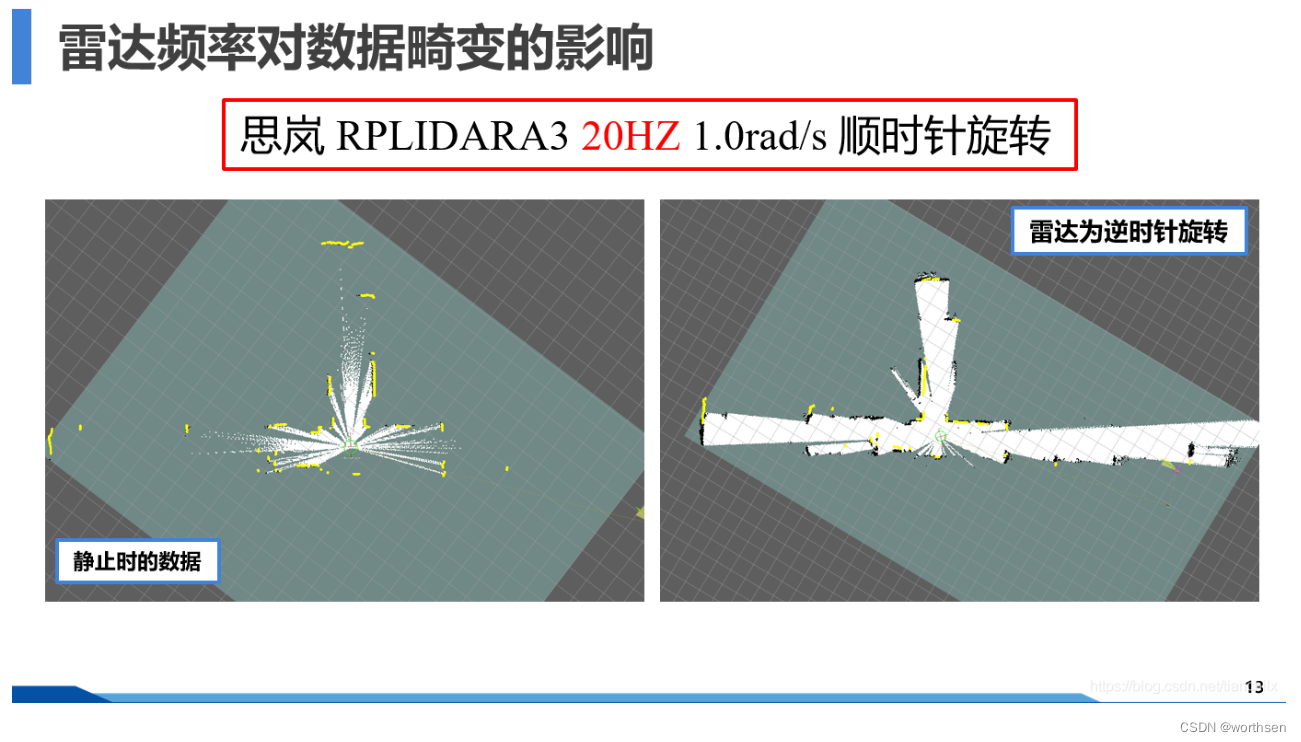
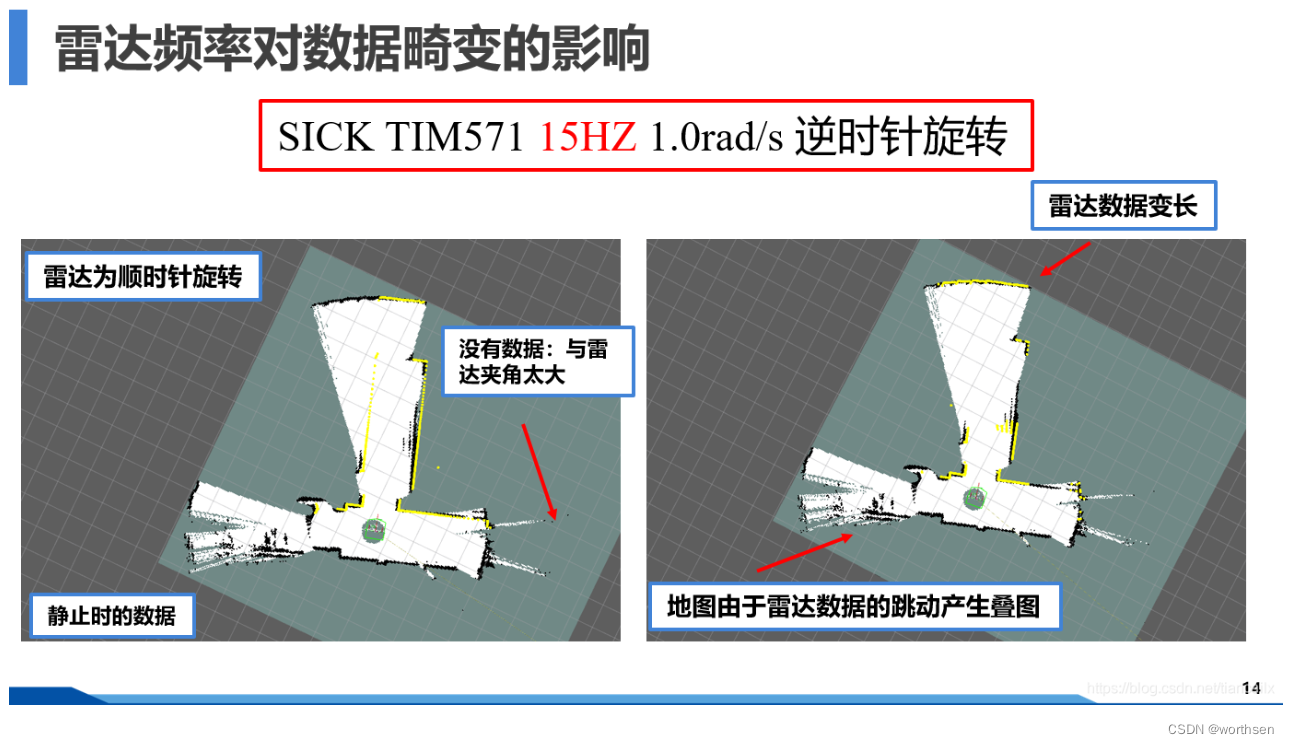
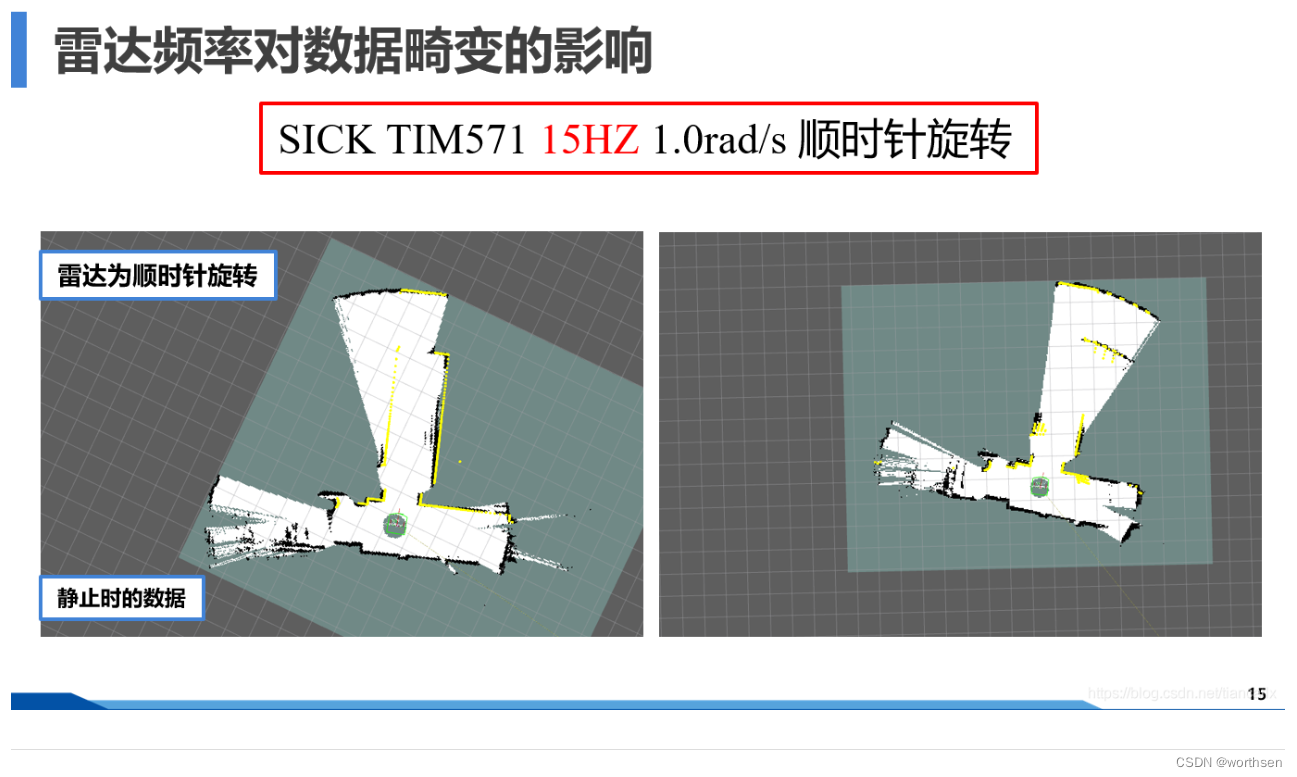

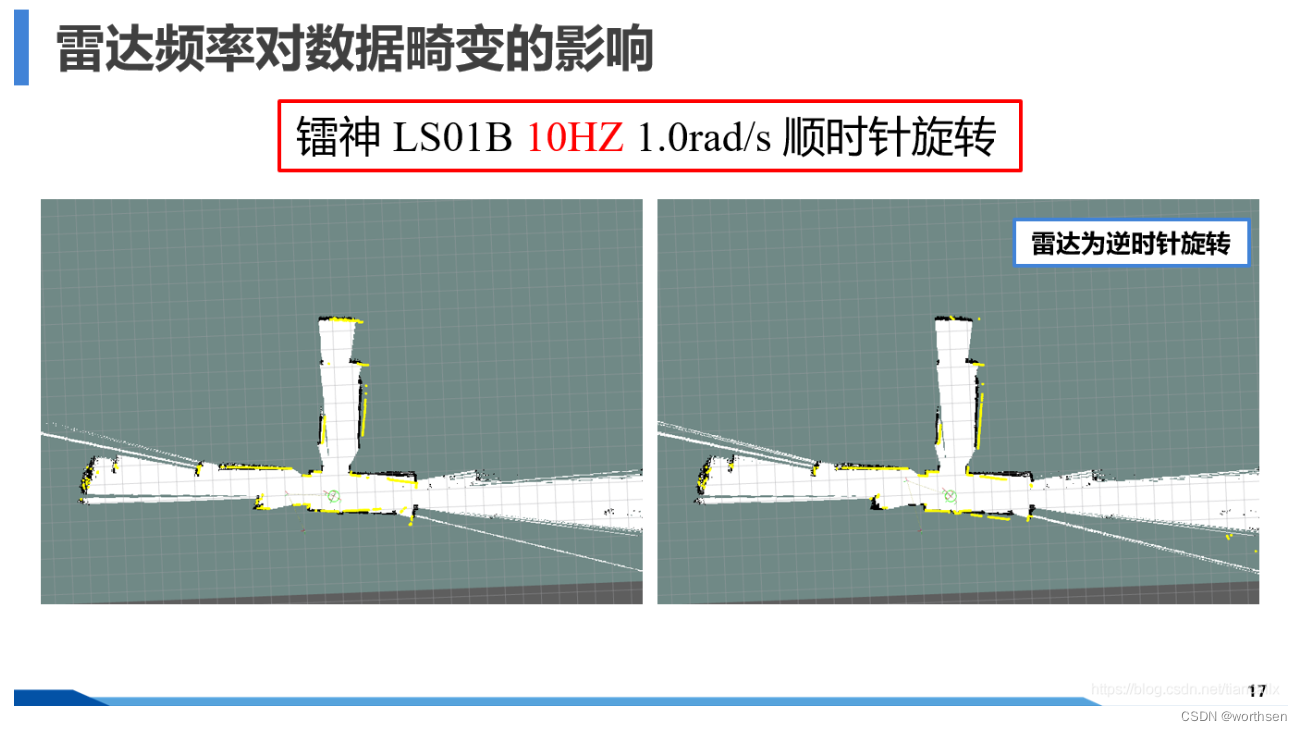
雷达自身的旋转是有方向的,大部分雷达都是逆时针旋转,与ROS中规定的一样,也有少部分雷达是顺时针旋转的,只不过使用起来有点不方便。
ROS中雷达数据格式
ros中激光雷达数据的消息格式
rosmsg show sensor_msgs/LaserScan
- 1
std_msgs/Header header // 数据的消息头
uint32 seq // 数据的序号
time stamp // 数据的时间戳
string frame_id // 数据的坐标系
float32 angle_min // 雷达数据的起始角度(最小角度)
float32 angle_max // 雷达数据的终止角度(最大角度)
float32 angle_increment // 雷达数据的角度分辨率(角度增量)
float32 time_increment // 雷达数据每个数据点的时间间隔
float32 scan_time // 当前帧数据与下一帧数据的时间间隔
float32 range_min // 雷达数据的最小值
float32 range_max // 雷达数据的最大值
float32[] ranges // 雷达数据每个点对应的在极坐标系下的距离值
float32[] intensities // 雷达数据每个点对应的强度值
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
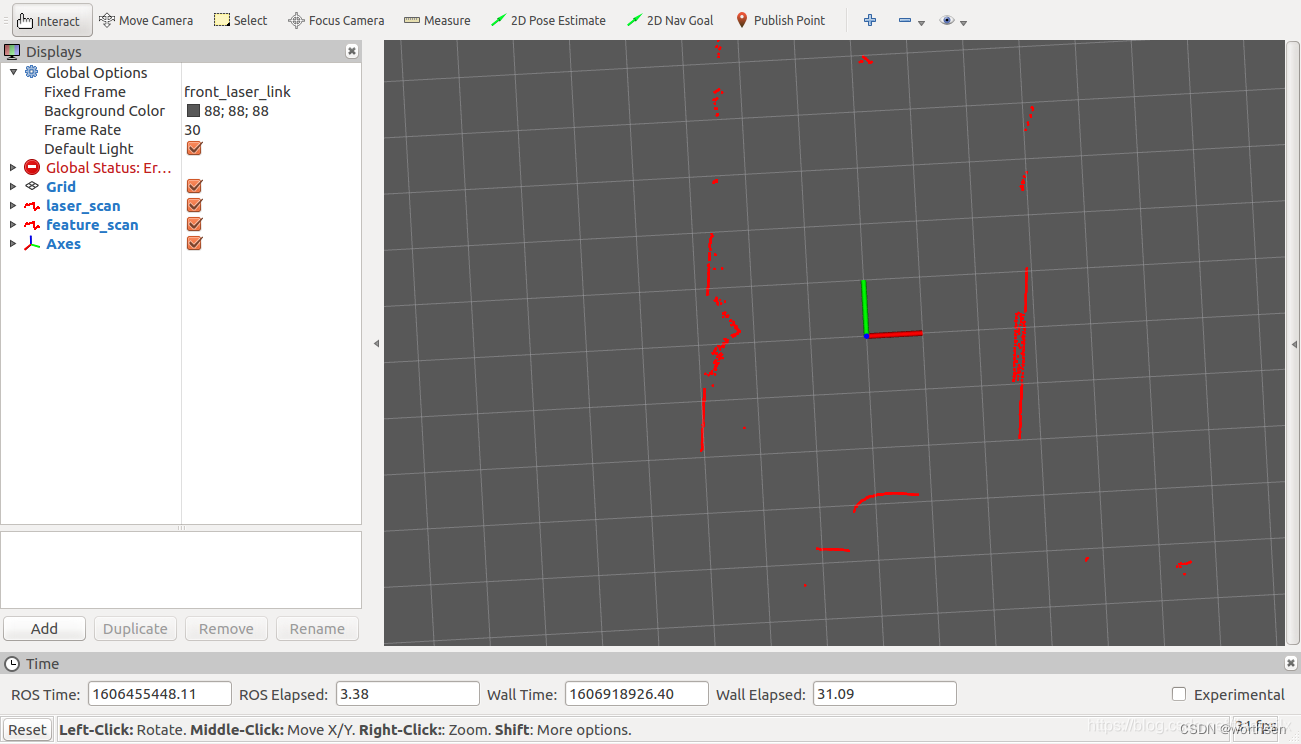
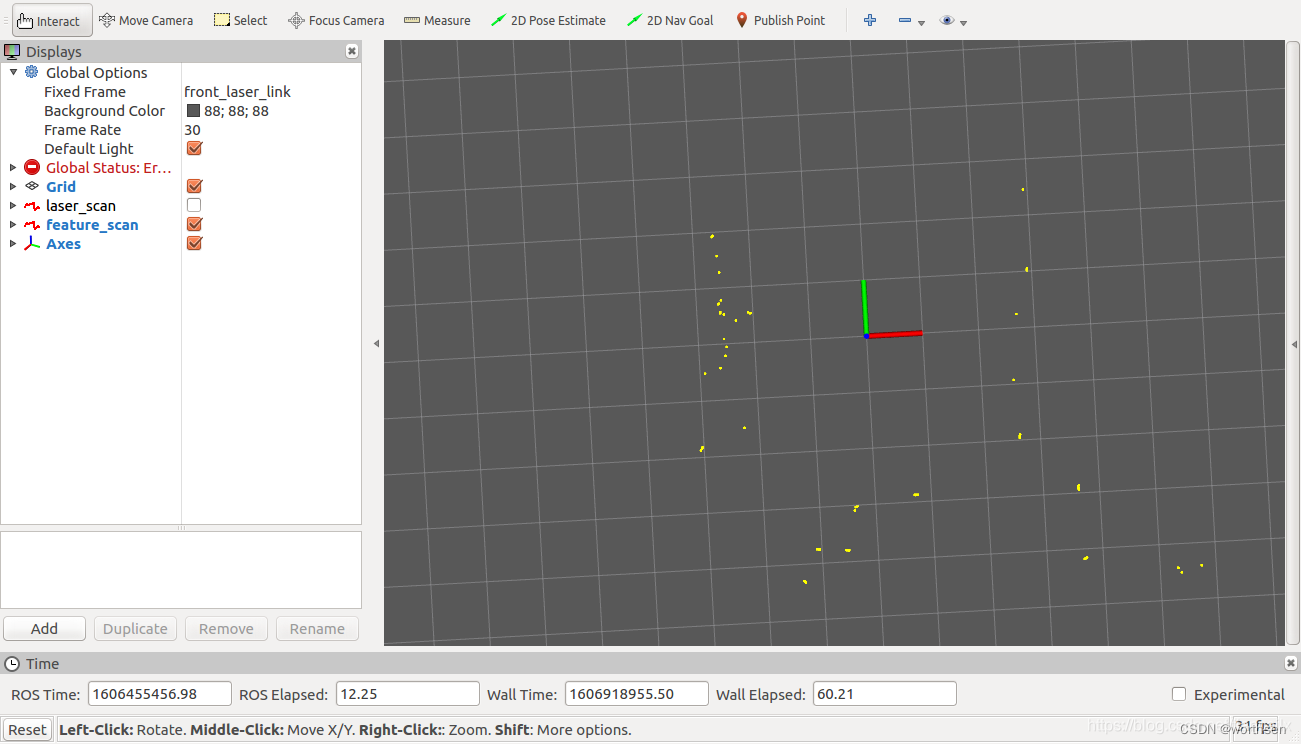
使用单线雷达实现LIO-SAM中的特征点提取
https://blog.csdn.net/tiancailx/article/details/110502471
对LIO-SAM中特征点提取的部分进行二维激光雷达下的实现。
实现的目的是为了熟悉激光雷达数据的处理方式,体验如何进行激光雷达数据处理,如何进行特征点提取。
LIO-SAM的项目地址为: https://github.com/TixiaoShan/LIO-SAM
LIO-SAM的特征点提取部分与LOAM基本相同,只不过在算曲率值时的具体计算方式稍有不同。
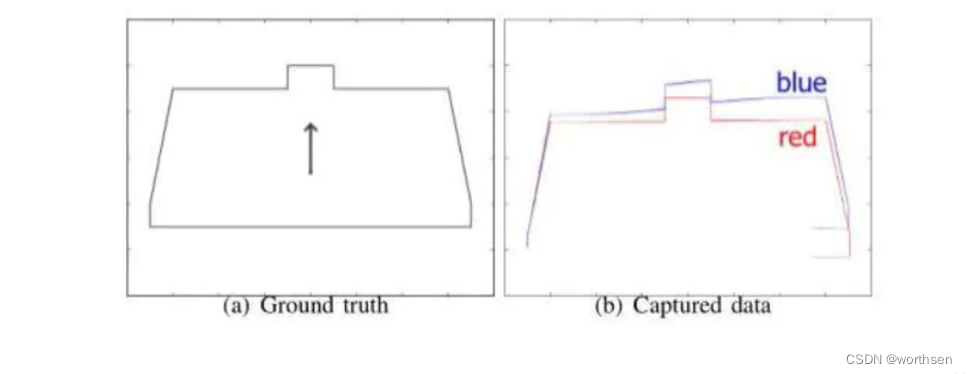
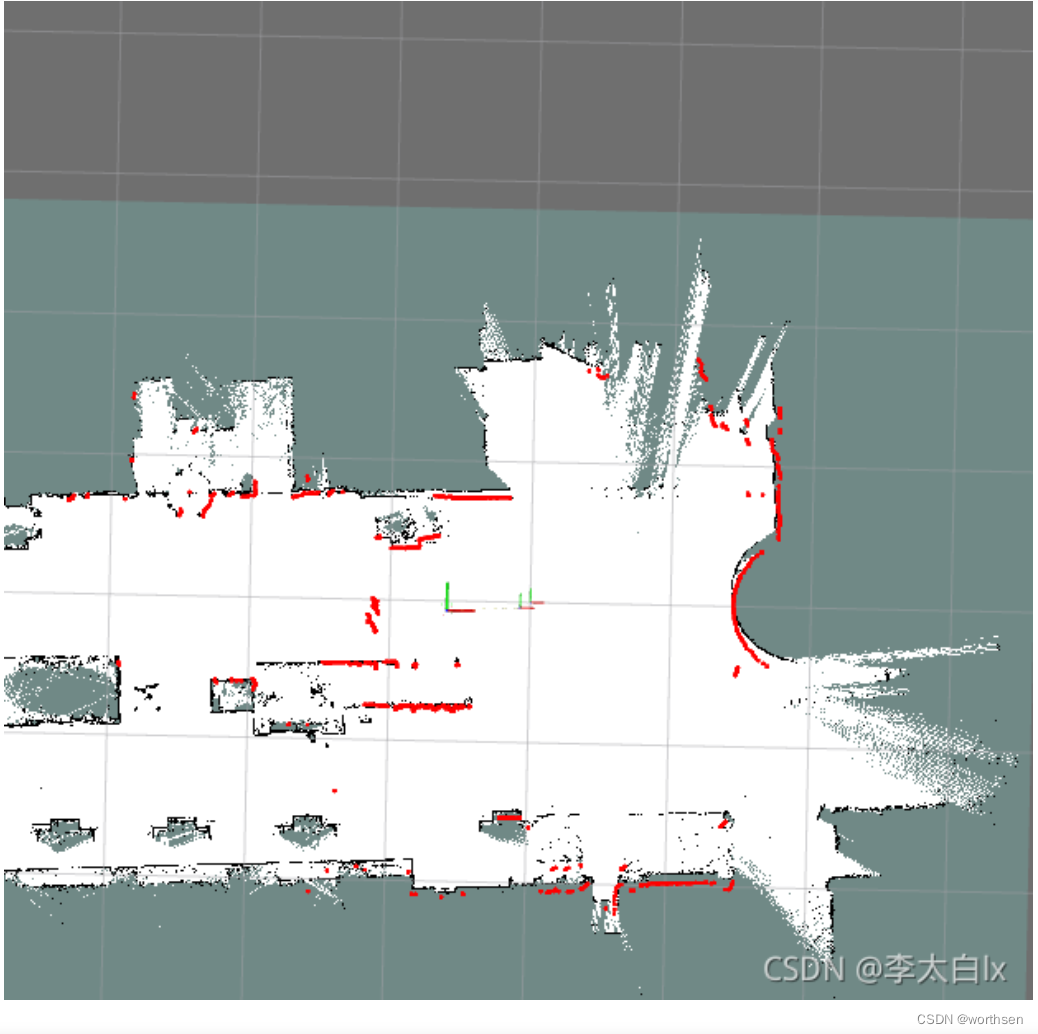
我们首先看一下激光原始数据的样子,如下图所示:
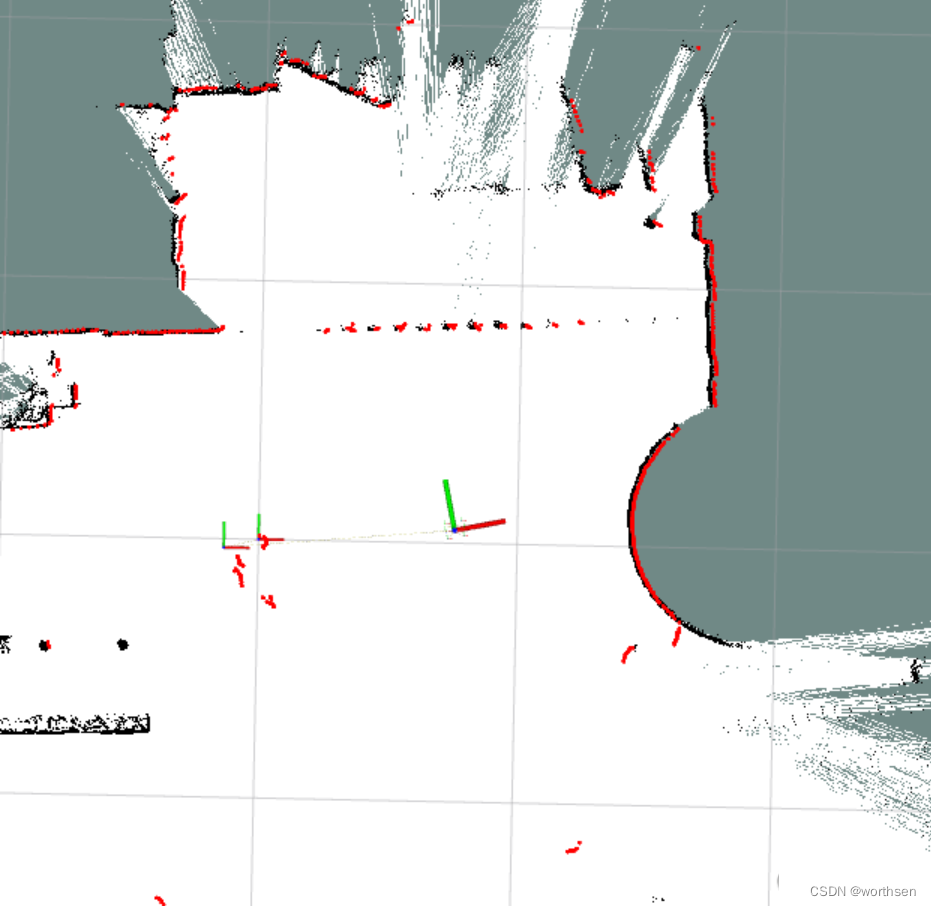
接下来,再看一下经过我们进行特征点提取之后的数据点的样子,如下图所示:
使用PCL进行雷达的消息类型转换
https://blog.csdn.net/tiancailx/article/details/110830731
PCL(Point Cloud Library)里实现了大量的处理点云相关的功能,实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。
栅格地图的构建
https://blog.csdn.net/tiancailx/article/details/112133226
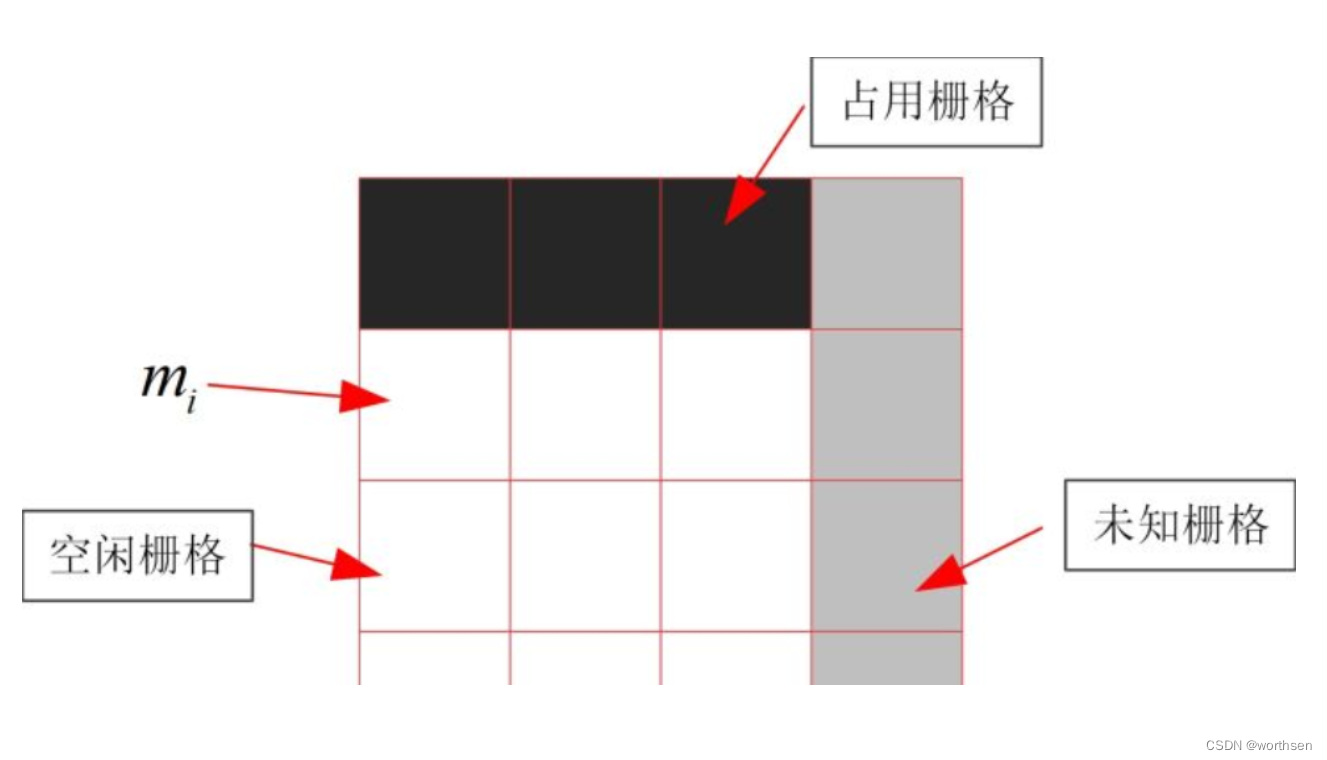
栅格地图就是用一个个栅格组成的网格来代表地图. 栅格里可以存储不同的数值, 代表这个栅格的不同含义.
ROS的栅格地图:
- 白色代表空闲,也就是可通过区域,其存储的值为 0;
- 黑色代表占用,也就是不可通过区域,其存储的值为 100;
- 灰色代表未知,就是说目前还不清楚这个栅格是否可以通过,其存储的值为 -1.
栅格地图由于其 占用与空闲的表示方法,在ROS中又被称为占用地图.
栅格地图的示意图如下图所示:
ROS中的栅格地图的消息类型:
$ rosmsg show nav_msgs/OccupancyGrid
std_msgs/Header header # 数据的消息头
uint32 seq # 数据的序号
time stamp # 数据的时间戳
string frame_id # 地图的坐标系
nav_msgs/MapMetaData info # 地图的一些信息
time map_load_time # 加载地图的时间
float32 resolution # 地图的分辨率,一个格子代表着多少米,一般为0.05,[m/cell]
uint32 width # 地图的宽度,像素的个数, [cells]
uint32 height # 地图的高度,像素的个数, [cells]
geometry_msgs/Pose origin # 地图左下角的格子对应的物理世界的坐标,[m, m, rad]
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
# 地图数据,优先累加行,从(0,0)开始。占用值的范围为[0,100],未知为-1。
int8[] data
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
消息可以分为3个部分,消息头header,地图信息info,地图数据data.
数据集
https://blog.csdn.net/tiancailx/article/details/115120665
基于g2o的后端优化的代码实现
https://blog.csdn.net/tiancailx/article/details/121266020
g2o(General Graphic Optimization)是基于图优化的库。
图优化是把优化问题表现成图的一种方式。一个图由若干个顶点(Vertex),以及连接这些顶点的边(Edge)组成。用顶点表示优化变量,用边表示误差项。
SLAM本质剖析-G2O:https://www.guyuehome.com/34679
- 优化前
- 优化后
- 最终地图
5.2 install without ROS
ChatGPT 给的如下回答
-
要在没有ROS的情况下运行Cartographer,需要以其他格式提供传感器信息。可以使用外部格式,如protobuf文件或CSV文件,将激光雷达数据、里程计数据或IMU数据导入Cartographer。这可能涉及编写代码来将数据转换为Cartographer可用的数据类型。
-
修改Cartographer源码: 如果愿意编写代码,您可以修改或扩展Cartographer源码以支持从其他库或格式获取传感器数据。这将需要研究Cartographer库的组织结构并理解代码和逻辑。
-
用其他库代替ROS传输数据: 如果系统中已经使用了其他库(如ZeroMQ、DDS、IPC 等)进行通信,可以将传感器数据收集和发送给Cartographer所需的数据,您需要编写代码适配这些库与Cartographer之间的数据交互。
-
由于Cartographer本身高度依赖于ROS的数据和头文件,执行这些修改可能涉及到相当的工作量。
-
Google Cartographer项目提供了一个称为cartographer_offline_node的离线版本,允许使用protobuf文件而不是ROS消息。以下是使用protobuf文件运行Cartographer的简要步骤:
-
- 安装Cartographer: 如果您尚未安装,请按照官方文档(https://google-cartographer-ros.readthedocs.io/en/latest/compilation.html)中的说明安装Cartographer。
-
- 准备数据: 准备包含传感器数据(如激光雷达扫描、IMU读数和位姿估计)的protobuf文件。这通常包括记录传感器的原始数据并将其转换为适合Cartographer处理的格式。
-
- 创建配置文件: 您需要为您的传感器创建一个配置文件,详细说明如何将传感器数据映射到Cartographer中的各个项目。可以参考Cartographer项目中的示例配置文件并根据自己的设备进行修改。关于这个过程的详细解释,可以参考这个帖子:https://google-cartographer-ros.readthedocs.io/en/latest/index.html
-
- 在Cartographer离线节点上运行Cartographer: 使用protobuf数据文件、配置文件以及相关数据映射文件运行Cartographer离线节点(cartographer_offline_node)。以下是一个示例命令:
cartographer_offline_node \
-configuration_directory /path/to/your/config \
-configuration_basename cartographer_config.lua \
-urdf_filename /path/to/your/robot/sensor.urdf \
-bag_filename /path/to/your/sensor/data.pbstream \
-pose_graph_filename /path/to/output/pose_graph.pbstream
- 1
- 2
- 3
- 4
- 5
- 6
-
- 运行完成后,将获得一个包含构建的位姿图(pose graph)的protobuf文件。可以使用各种仿真和可视化工具对位姿图进行分析和评估,如Gazebo、RViz或自定义工具。
请注意,这些步骤只是离线处理Cartographer SLAM问题的一个基本方法。由于这涉及到从原始传感器数据开始创建自己的protobuf文件、配置和映射文件,可能需要对Cartographer有较深入的了解。不过,这是从ROS中分离Cartographer的一个可行方法。
- 运行完成后,将获得一个包含构建的位姿图(pose graph)的protobuf文件。可以使用各种仿真和可视化工具对位姿图进行分析和评估,如Gazebo、RViz或自定义工具。
知乎一回答
- 要解决传感器通讯机制问题: 思岚雷达也好或者其它型号的雷达都会提供不基于ros的驱动和SDK,你要做的是手写一个mqtt机制来把雷达数据传输出来。到这一步,你相当于仿写了ros的 subscribe和publish话题功能
- 解决slam框架脱离ros问题: 除非你从头手写一个slam,不然还是要调slam库的。我推荐你对Hectorslam 或者cartographer来进行去ros化,Hector代码十分简单,去ros化也很简单。如果你追求slam的工程性,那么推荐对cartographer进行去ros化,不过这需要花一段时间,我当时是花了一周时间,还需要重构很多数据类型,贼烦!
- 把数据喂给slam: 在slam端写好接收传感器数据函数,启动slam。地图可视化界面书写: 这里要用到qt,去手写一个接收地图并显示的软件。如果你不会,可以用OpenCV显示地图。
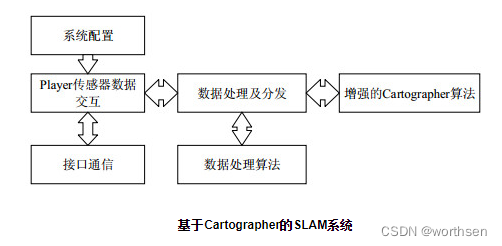
扫地机器人增强位姿融合的Cartographer算法及系统实现
SLAM系统以驱动的方式合入到整个Player平台中, 易于修改替换, 通过订阅相应传感器接收其数据进行处理。
cartographer without ros【CloudFlame】
不带 ROS 的快速安装
创建CartographerEnvStart.sh文件
cd ~/Code
# Install the required libraries that are available as debs.
sudo apt-get update
sudo apt-get install -y \
clang \
cmake \
g++ \
git \
google-mock \
libboost-all-dev \
libcairo2-dev \
libcurl4-openssl-dev \
libeigen3-dev \
libgflags-dev \
libgoogle-glog-dev \
liblua5.2-dev \
libsuitesparse-dev \
lsb-release \
ninja-build \
stow \
librosbag-dev \
libbz2-dev \
liblaser-geometry-dev \
libnav-msgs-dev \
# Install Ceres Solver and Protocol Buffers support if available.
# No need to build it ourselves.
if [[ "$(lsb_release -sc)" = "focal" || "$(lsb_release -sc)" = "buster" ]]
then
sudo apt-get install -y python3-sphinx libgmock-dev libceres-dev protobuf-compiler
else
sudo apt-get install -y python-sphinx
if [[ "$(lsb_release -sc)" = "bionic" ]]
then
sudo apt-get install -y libceres-dev
fi
fi
cd ~/Code
git clone https://github.com/abseil/abseil-cpp.git
cd abseil-cpp
git checkout d902eb869bcfacc1bad14933ed9af4bed006d481
mkdir build
cd build
cmake -G Ninja \
-DCMAKE_BUILD_TYPE=Release \
-DCMAKE_POSITION_INDEPENDENT_CODE=ON \
-DCMAKE_INSTALL_PREFIX=/usr/local/stow/absl \
..
ninja
sudo ninja install
cd /usr/local/stow
sudo stow absl
cd ~/Code
VERSION="1.13.0"
# Build and install Ceres.
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver
git checkout tags/${VERSION}
mkdir build
cd build
cmake .. -G Ninja -DCXX11=ON
ninja
CTEST_OUTPUT_ON_FAILURE=1 ninja test
sudo ninja install
cd ~/Code
VERSION="v3.4.1"
# Build and install proto3.
git clone https://github.com/google/protobuf.git
cd protobuf
git checkout tags/${VERSION}
mkdir build
cd build
cmake -G Ninja \
-DCMAKE_POSITION_INDEPENDENT_CODE=ON \
-DCMAKE_BUILD_TYPE=Release \
-Dprotobuf_BUILD_TESTS=OFF \
../cmake
ninja
sudo ninja install
cd ~/Code
# Build and install Cartographer.
git clone https://github.com/cartographer-project/cartographer.git
cd cartographer
mkdir build
cd build
cmake .. -G Ninja
ninja
CTEST_OUTPUT_ON_FAILURE=1 ninja test
sudo ninja install
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
./CartographerEnvStart.sh
- 1
思路和大纲
思路:仿cartographer_ros使用cartographer。
分析cartographer_ros代码分析后发现:
- cartographer_node实际控制着整个系统的业务逻辑:
- subscribers_订阅了各类传感器数据
- map_builder_bridge_用于封装map_builder_,并将Ros传感器数据转换cartographer数据类型。
- map_builder_bridge_中的map_builder_用于添加轨迹,建图
大纲:
传感器数据的处理:将各类原始数据转换cartographer数据类型:
scan_format
odom_format
imu_format
landmark_format
- 1
- 2
- 3
- 4
map_builder_的使用:
map_builder_node
- 1
雷达scan数据转换
激光雷达LaserScan传感数据转换为cartographer中的TimedPointCloudData数据。还有cartographer中的TimedPointCloudData数据和Ros的sensor_msgs::LaserScan数据相互转换,方便引入Rosbag进行储存和读取。
1:TimedPointCloudData数据类型【timed_point_cloud_data.h】
//时间
common::Time time;
//原点
Eigen::Vector3f origin;
//点云数据
TimedPointCloud ranges;
//坐标
Eigen::Vector3f position;
//帧内时间
float time;
//反射强度
std::vector<float> intensities;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
2:LaserScan传感数据转换cartographer数据
cartographer::sensor::TimedPointCloudData ScanToTimedPointCloudData()
{
cartographer::sensor::TimedPointCloudData time_point_cloud;
time_point_cloud.time = cartographer::common::NowTime();
cartographer::sensor::PointCloudWithIntensities point_cloud;
float angle_min = -M_PI;
float angle_max = M_PI;
float angle = angle_min;
float angle_increment = (angle_max - angle_min) / float(scanszie);
float range_min = std::atof(driver_->getParametersCached().at("radial_range_min").c_str());
float range_max = std::atof(driver_->getParametersCached().at("radial_range_max").c_str());
float range_length = range_min;
cartographer::sensor::TimedRangefinderPoint point;
for (size_t i = 0; i < scanszie; ++i)
{
range_length = float(scandata.distance_data[i]) / 1000.0f;
if (range_min <= range_length && range_length <= range_max)
{
point.position = Eigen::Vector3f(range_length * cos(angle), range_length * sin(angle), 0.);
point_cloud.intensities.push_back(scandata.amplitude_data[i]);
}
else
{
point.position = Eigen::Vector3f::Zero();
point_cloud.intensities.push_back(0.f);
}
point.time = 0;
point_cloud.points.push_back(point);
angle += angle_increment;
}
time_point_cloud.origin = Eigen::Vector3f::Zero();
time_point_cloud.ranges = point_cloud.points;
time_point_cloud.intensities = point_cloud.intensities;
return time_point_cloud;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
3:LaserScan传感数据转换 ROS 数据
【cartographer_ros】三: 发布和订阅雷达LaserScan信息
4:cartographer数据转换ROS数据
sensor_msgs::LaserScan ToRosMsg(cartographer::sensor::TimedPointCloudData time_point_cloud)
{
sensor_msgs::LaserScan scan;
scan.header.stamp = common::RosFromCarto(time_point_cloud.time);
scan.header.frame_id = "base_link";
scan.angle_min = -M_PI + ((slam::common::ConfigData.slam_scan_offset * M_PI) / 180.0);
scan.angle_max = M_PI + ((slam::common::ConfigData.slam_scan_offset * M_PI) / 180.0);
scan.angle_increment = (scan.angle_max - scan.angle_min) / float(common::ConfigData.scanner_per_scan);
scan.scan_time = float(1.0 / float(common::ConfigData.scanner_frequency));
scan.time_increment = float(1.0 / float(common::ConfigData.scanner_frequency * common::ConfigData.scanner_per_scan));
scan.range_min = 0.0;
scan.range_max = 100.0;
scan.ranges.resize(common::ConfigData.scanner_per_scan);
scan.intensities.resize(common::ConfigData.scanner_per_scan);
for (int i = 0; i < common::ConfigData.scanner_per_scan; ++i)
{
scan.ranges[i] = sqrt(pow(time_point_cloud.ranges[i].position[0], 2) + pow(time_point_cloud.ranges[i].position[1], 2));
scan.intensities[i] = time_point_cloud.intensities[i];
}
return scan;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
5:ROS 数据转换cartographer数据
cartographer::sensor::TimedPointCloudData ToCartoSensor(sensor_msgs::LaserScan scan)
{
cartographer::sensor::TimedPointCloudData time_point_cloud;
cartographer::sensor::PointCloudWithIntensities point_cloud;
size_t scanszie = scan.ranges.size();
float angle = scan.angle_min;
float angle_increment = scan.angle_increment;
float range_length = scan.range_min;
cartographer::sensor::TimedRangefinderPoint point;
for (size_t i = 0; i < scanszie; ++i)
{
range_length = scan.ranges[i];
point.position = Eigen::Vector3f(range_length * cos(angle), range_length * sin(angle), 0.);
point.time = 0;
point_cloud.intensities.push_back(scan.intensities[i]);
point_cloud.points.push_back(point);
angle += angle_increment;
}
time_point_cloud.origin = Eigen::Vector3f::Zero();
time_point_cloud.ranges = point_cloud.points;
time_point_cloud.intensities = point_cloud.intensities;
time_point_cloud.time = TimeCartoFromRos(scan.header.stamp);
return time_point_cloud;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
里程计odom数据转换
里程计Odom数据转换为cartographer中的OdometryData数据。还有cartographer中的OdometryData数据和ROS的nav_msgs::Odometry数据相互转换,方便引入Rosbag进行储存和读取。
1:OdometryData数据类型【odometry_data.h】
//时间
common::Time time;
//位置
transform::Rigid3d pose;
- 1
- 2
- 3
- 4
2:Odom数据转换cartographer数据
cartographer::sensor::OdometryData GetOdometryData()
{
cartographer::sensor::OdometryData odometry_data;
current_time = ros::Time::now();
double dt = (current_time - last_time).toSec();
double dx = (vx * cos(th) - vy * sin(th)) * dt;
double dy = (vx * sin(th) + vy * cos(th)) * dt;
double dth = vth * dt;
last_time = current_time;
x += dx;
y += dy;
th += dth;
cartographer::common::Time curTime = cartographer::common::NowTime();
const Eigen::AngleAxisd rotation(th, Eigen::Vector3d::UnitZ());
const Eigen::Vector3d translation(x, y, 0.0);
cartographer::transform::Rigid3d pose(translation, rotation);
odometry_data = cartographer::sensor::OdometryData{curTime, pose};
return odometry_data;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
3:Odom数据转换 ROS 数据
【cartographer_ros】四: 发布和订阅里程计odom信息
4:cartographer数据转换ROS数据
nav_msgs::Odometry ToRosMsg(cartographer::sensor::OdometryData odometry_data)
{
nav_msgs::Odometry odom;
odom.header.stamp = TimeRosFromCarto(odometry_data.time);
odom.header.frame_id = "odom";
odom.pose.pose.position.x = odometry_data.pose.translation().x();
odom.pose.pose.position.y = odometry_data.pose.translation().y();
odom.pose.pose.position.z = odometry_data.pose.translation().z();
odom.pose.pose.orientation.w = odometry_data.pose.rotation().w();
odom.pose.pose.orientation.x = odometry_data.pose.rotation().x();
odom.pose.pose.orientation.y = odometry_data.pose.rotation().y();
odom.pose.pose.orientation.z = odometry_data.pose.rotation().z();
odom.child_frame_id = "base_link";
return odom;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
5:ROS 数据转换cartographer数据
cartographer::sensor::OdometryData ToCartoSensor(nav_msgs::Odometry odom)
{
cartographer::sensor::OdometryData odometry_data;
odometry_data.time = Time::CartoFromRos(odom.header.stamp);
const Eigen::Vector3d translation(odom.pose.pose.position.x, odom.pose.pose.position.y, odom.pose.pose.position.z);
const Eigen::Quaterniond rotation(odom.pose.pose.orientation.w, odom.pose.pose.orientation.x, odom.pose.pose.orientation.y, odom.pose.pose.orientation.z);
odometry_data.pose = cartographer::transform::Rigid3d(translation, rotation);
return odometry_data;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
陀螺仪Imu数据转换
陀螺仪Imu数据转换为cartographer中的ImuData数据。还有cartographer中的ImuData数据和 ROS 的sensor_msgs::Imu数据相互转换,方便引入Rosbag进行储存和读取。
1:ImuData数据类型【imu_data.h】
//时间
common::Time time;
//线加速度
Eigen::Vector3d linear_acceleration;
//角速度
Eigen::Vector3d angular_velocity;
- 1
- 2
- 3
- 4
- 5
- 6
2:Imu数据转换cartographer数据
cartographer::sensor::ImuData GetImuData()
{
cartographer::sensor::ImuData imu_data;
//计算
//线加速度(含重力)
acc[0] = *((float *)&handle_buf[22]);
acc[1] = *((float *)&handle_buf[26]);
acc[2] = *((float *)&handle_buf[30]);
//角速度(陀螺仪I的输出)
gyo[0] = *((float *)&handle_buf[82]);
gyo[1] = *((float *)&handle_buf[86]);
gyo[2] = *((float *)&handle_buf[90]);
//欧拉角
eular[0] = *((float *)&handle_buf[146]);
eular[1] = *((float *)&handle_buf[150]);
eular[2] = *((float *)&handle_buf[154]);
Eigen::Vector3d linear_acceleration(((double)acc[0] * (-9.8)), ((double)acc[1] * (-9.8)), ((double)acc[2] * (-9.8)));
Eigen::Vector3d angular_velocity(((double)gyo[0] * 3.1415926 / 180), ((double)gyo[1] * 3.1415926 / 180), ((double)gyo[2]) * 3.1415926 / 180);
Eigen::Vector3d imu_angle(((double)eular[0]), ((double)eular[1]), ((double)eular[2]));
imu_data_.time = cartographer::common::NowTime();
imu_data_.linear_acceleration = linear_acceleration;
imu_data_.angular_velocity = angular_velocity;
return imu;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
3:Imu数据转换ROS数据
【cartographer_ros】五: 发布和订阅陀螺仪Imu信息
4:cartographer数据转换ROS数据
sensor_msgs::Imu ToRosMsg(cartographer::sensor::ImuData imu_data)
{
sensor_msgs::Imu imu;
imu.header.stamp = TimeRosFromCarto(imu_data.time);
imu.header.frame_id = "imu";
imu.angular_velocity.x = imu_data.angular_velocity.x();
imu.angular_velocity.y = imu_data.angular_velocity.y();
imu.angular_velocity.z = imu_data.angular_velocity.z();
imu.linear_acceleration.x = imu_data.linear_acceleration.x();
imu.linear_acceleration.y = imu_data.linear_acceleration.y();
imu.linear_acceleration.z = imu_data.linear_acceleration.z();
return imu;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
5:ROS 数据转换cartographer数据
cartographer::sensor::ImuData ToCartoSensor(sensor_msgs::Imu imu)
{
cartographer::sensor::ImuData imu_data;
imu_data.time = TimeCartoFromRos(imu.header.stamp);
imu_data.angular_velocity = Eigen::Vector3d(imu.angular_velocity.x, imu.angular_velocity.y, imu.angular_velocity.z);
imu_data.linear_acceleration = Eigen::Vector3d(imu.linear_acceleration.x, imu.linear_acceleration.y, imu.linear_acceleration.z);
return imu_data;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
路标landmark数据转换
cartographer中的LandmarkData数据和Ros中的cartographer_ros_msgs::LandmarkList数据相互转换,方便引入Rosbag进行储存和读取。
1:LandmarkData数据类型【landmark_data.h】
struct LandmarkObservation {
std::string id;
transform::Rigid3d landmark_to_tracking_transform;
double translation_weight;
double rotation_weight;
};
struct LandmarkData {
common::Time time;
std::vector<LandmarkObservation> landmark_observations;
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
2:cartographer数据转换ROS数据
cartographer_ros_msgs::LandmarkList ToRosMsg(cartographer::sensor::LandmarkData landmark_data)
{
cartographer_ros_msgs::LandmarkList landmarkList;
cartographer_ros_msgs::LandmarkEntry landmarkEntry;
landmarkList.header.frame_id = "base_link";
landmarkList.header.stamp = common::RosFromCarto(landmark_data.time);
landmarkList.landmarks.clear();
for (auto var : landmark_data.landmark_observations)
{
landmarkEntry.id = var.id;
landmarkEntry.tracking_from_landmark_transform.position.x = var.landmark_to_tracking_transform.translation().x();
landmarkEntry.tracking_from_landmark_transform.position.y = var.landmark_to_tracking_transform.translation().y();
landmarkEntry.tracking_from_landmark_transform.position.z = 0;
landmarkEntry.tracking_from_landmark_transform.orientation.x = var.landmark_to_tracking_transform.rotation().x();
landmarkEntry.tracking_from_landmark_transform.orientation.y = var.landmark_to_tracking_transform.rotation().y();
landmarkEntry.tracking_from_landmark_transform.orientation.z = var.landmark_to_tracking_transform.rotation().z();
landmarkEntry.tracking_from_landmark_transform.orientation.w = var.landmark_to_tracking_transform.rotation().w();
landmarkEntry.translation_weight = var.translation_weight;
landmarkEntry.rotation_weight = var.rotation_weight;
landmarkList.landmarks.push_back(landmarkEntry);
}
return landmarkList;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
3:Ros数据转换cartographer数据
cartographer::sensor::LandmarkData ToCartoSensor(cartographer_ros_msgs::LandmarkList landmark_list)
{
cartographer::sensor::LandmarkData landmark_data;
landmark_data.time = FromRos(landmark_list.header.stamp);
for (const LandmarkEntry& entry : landmark_list.landmarks) {
landmark_data.landmark_observations.push_back(
{entry.id, ToRigid3d(entry.tracking_from_landmark_transform),
entry.translation_weight, entry.rotation_weight});
}
return landmark_data;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
参考
1、官网–cartographer
2、算法原理–cartographer–Real-Time Loop Closure in 2D LIDAR SLAM
W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop Closure in 2D LIDAR SLAM, in Robotics and Automation (ICRA), 2016 IEEE International Conference on. IEEE, 2016. pp. 1271–1278.
3、代码–cartographer
4、SLAM学习笔记(十九)开源3D激光SLAM总结大全——Cartographer3D,LOAM,Lego-LOAM,LIO-SAM,LVI-SAM,Livox-LOAM的原理解析及区别
5、https://linklab-uva.github.io/autonomousracing/assets/files/SLAM.pdf
6、张亮, 刘智宇, 曹晶瑛, 沈沛意, 蒋得志, 梅林, 朱光明, 苗启广. 扫地机器人增强位姿融合的Cartographer算法及系统实现[J]. 软件学报, 2020, 31(9): 2678-2690.
7、cartographer without ros
8、李想–从零开始搭建二维激光SLAM
9、机器人开发–SLAM详细介绍
10、代码解读–cartographer–linyicheng博士
11、代码解读–cartographer–heimazaifei
12、如何不在ROS平台下做激光slam?
13、梅卡曼德(北京)机器人科技有限公司 CEO 邵天兰 评 Cartographer
14、【Win10+Cartographer+QT+OpenGL】之实时显示3D点云及处理
15、Cartographer ROS Documentation

