
热门标签
热门文章
- 1前、后端通用的可视化逻辑编排_前端 流程编排怎么做
- 2STM32Cube配置等精度测频和测相位差_stm32测量相位差
- 3threejs添加弹窗_vue threejs 弹出框
- 4制造业生产数据实时同步,怎样才能减轻IT人员的压力?
- 5docker pull超时_docker pull 超时时间
- 6postman接口测试学习笔记(非常详细)_postman学习笔记
- 7Vue 删除node_modules_卸载modules
- 8因特网、万维网和互联网_万维网 互联网 因特网
- 9AndroidStudio无线传输文件到手机端_android studio 局域网pc 手机传输
- 10Git add回退 & commit回退_git add 回退
当前位置: article > 正文
Depth Information Assisted Collaborative Mutual Promotion Network for SingleImage Dehazing(CVPR24)
作者:神奇cpp | 2024-08-04 01:18:13
赞
踩
Depth Information Assisted Collaborative Mutual Promotion Network for SingleImage Dehazing(CVPR24)
首先我们要知道带雾图像和深度是有关系的,具体关系如公式1,2。但是这种模型容易受到雾浓度不均匀的影响,因此去雾性能收到限制。因此本文从深度和雾的关系出发,同时对两个任务进行优化,相互促进。
端到端的模型,摆脱了大气散射模型的限制,取得了更好的去雾效果,是现在的主流方法。

模型结构
去雾模型
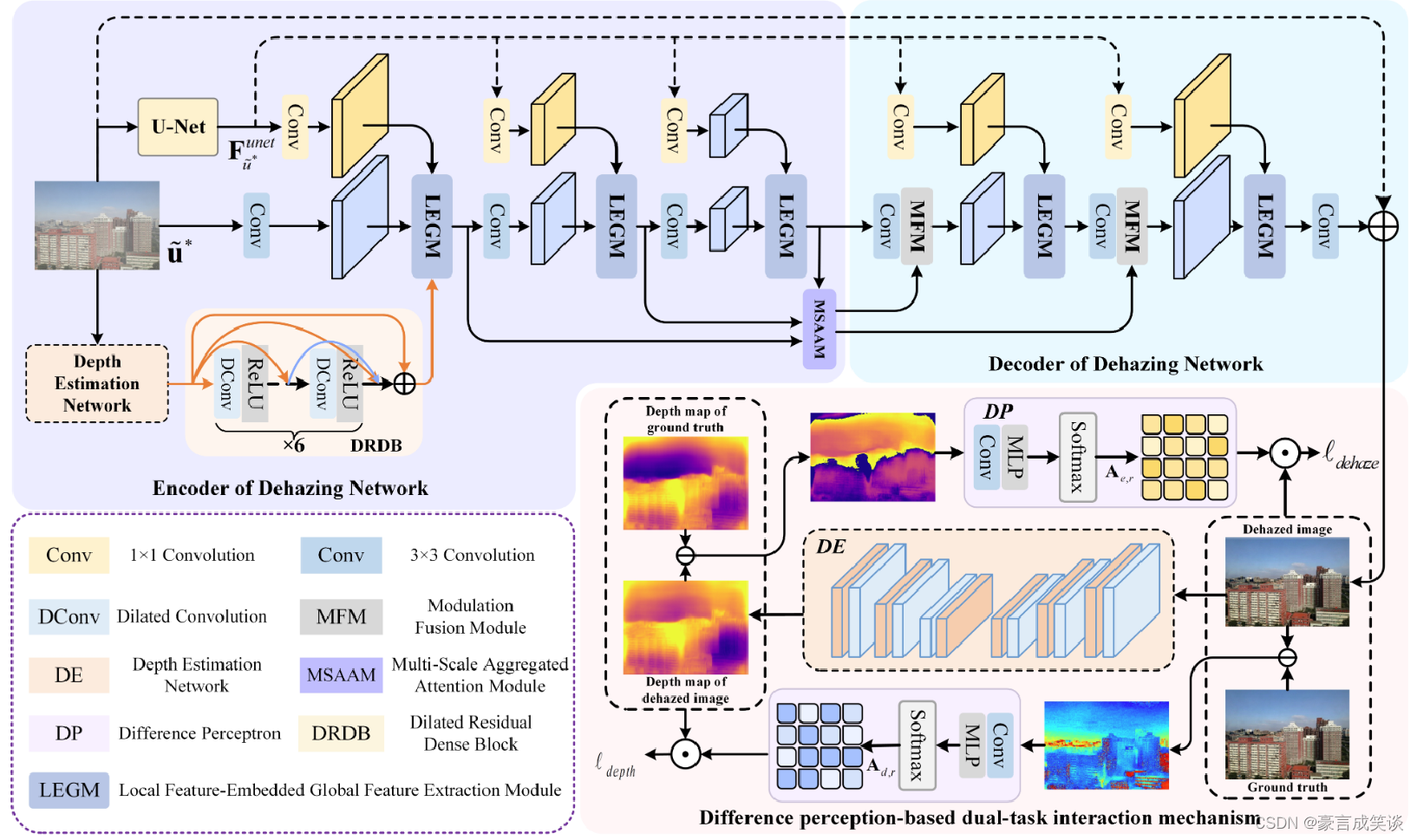
编码部分:
从图中我们可以看出,带雾的图像被输入到两个分支中。
UNet:提取图像的多尺度特征,同时,计算公式5所示损失。该损失限制带雾图像的特征和去雾图像的特征相同,也就是说,希望网络提取受雾影响小的特征,更好的解码得到去雾图像。
![]()
LEGM:结构如上图中(a)所示 ,即一个自注意力模块。即将两种特征连接后,计算空间注意力。
MASSM:结构如(b)所示。得到的多尺度特征,经过GAP(全局平均池化)和全连接后,得到注意力A,得到不同尺度特征的权重。
解码部分:
MFM:根据编码阶段的多尺度特征计算通道注意力。
深度估计模型:
扩张残差卷积。
误差感知驱动的深度估计
我们得到的去雾图像和GT之间的误差,可以反映去雾不理想的区域,这些区域也是深度估计困难的区域。通过限制去雾图像估计得到的深度,进一步提高了去雾模型性能,同时引入了去雾图像,提高深度估计的性能。

损失函数:

去雾模型的损失函数。权重为深度估计的误差经过卷积得到。VGG表示预训练模型的特征损失,使得去雾图像的特征靠近GT特征,远离带雾图像的特征。
损失包括UNet,depth,dehaze。
实验结果
这里部分对比方法没有用到深度信息。
消融实验:
排除了MSSAM和DE、DP,用求和代替LEGM、MFM,得到base模型,+表示在上一行的模型上添加该模块。

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/神奇cpp/article/detail/925677
推荐阅读
相关标签

