
- 1Qt 不同数据类型转换
- 2java文件上传到AWS S3 亚马逊(包括删除文件 详细版)_java文件上传aws
- 3java常见轮询算法
- 4鸿蒙OpenHarmony hi3516开发板,标准系统调用外部Rest接口_openharmony libcurl
- 5AGI|一篇小白都能看懂的RAG入门介绍!_rag 关键词
- 6Java实训——计算器(四则运算以及其他功能)_java计算器
- 7vue3 +ts 安装并封装axios_vue3 ts axios封装
- 82022最新!视觉SLAM综述(多传感器/姿态估计/动态环境/视觉里程计)_视觉slam的发展历程和目前主流的视觉slam算法
- 9android 正则表达式6-16位字母或数字,一个匹配8-16位数字和字母密码的正则表达式...
- 10文档摘要自动提取算法——抽取式
如何消除误差?室内定位中的关键技术
赞
踩
1、互相关干扰消除技术
在室内复杂的定位环境中,接收机很有可能接收到定位源直射的强信号和经过反射、折射的弱信号,强信号和弱信号的功率差可以达到20~30dB。此时在弱信号的相关解算中,强信号产生的互相关峰与弱信号产生的自相关峰幅值处于同一量级,很有可能对弱信号的捕获造成不利影响。因此在定位过程中通常需要通过消除互相关干扰的影响达到捕获弱信号的目的,其中常用的方法有子空间投影法和扣除法。
⑴子空间投影法
子空间投影法是在载波多普勒、载波相位以及码相位构建的信号子空间中生成新码,并将待检测的弱信号在此空间内分解并产生出与强信号完全正交、与弱信号相关性强的新码,以此码进行弱信号的捕获。由于新码的构建需要实时运算,而此运算中需要进行大量的矩阵和向量运算,因此构建新码十分困难。E.P.Glennon提出改变Gold码的均衡性使得本地码与强干扰信号互相关性最小,但该方法同时也会降低一定的自相关性。
⑵扣除法
扣除法比较常见的有两种方法:一是利用已捕获的强干扰信号的多普勒频移、载波相位、码相位、信号幅度等参数在本地接收机内进行强干扰信号的重构,然后将强信号从射频信号中扣除,再进行弱信号的捕获;二是在做完接收信号与本地码的相关运算后从中扣除强干扰信号的互相关值,以此消除强干扰信号对弱信号捕获的影响。根据扣除操作发生的位置是在相关运算前和后可以分为前端消除法和后端消除法。与子空间投影法相比,扣除法占用资源少、易实现,但对强信号的参数依赖程度大,当强信号的参数估计误差较大时,扣除法对互相关干扰的消除作用就会减小甚至不起作用。
2、非视距效应消除技术
非视距效应是由于定位信号源与定位终端之间存在障碍物,导致定位信号无法沿视距传播,只能通过折射、反射等方式传播。由此产生的误差称为非视距(Non-Line of Sight,NLOS)误差。在室内定位中,由于建筑物内的复杂结构和经常性的人员流动导致非视距效应十分显著。影响定位精度的主要误差来源有测量误差和非视距误差,其中非视距误差远远大于测量误差,因此消除非视距效应是提高室内定位精度的主要方式。
⑴极大似然算法
在非视距环境中,可以利用测量噪声、非视距误差统计和 LOS/NLOS距离概率模型构建最大似然问题进行定位解算,消除非视应。Gezici使用最大似然算法最大化联合概率密度函数剔除非视距观测量,Qi采用最大后验概率估计非视距误差统计分布。
⑵最小二乘算法
在视距环境中室内定位最广泛的算法之一是最小二乘法,在得到测量量后建立方程解出定位终端的位置。而在非视距环境下也可以通过最小二乘法进行定位解算。残差加权(RWGH)算法是Chen提出的一种针对非视距环境的定位算法,可以有效减小非视距效应对定位精度的影响。
虽然众多学者对非视距误差的消除进行了大量研究,但由于非视距的复杂性,目前消除模型仍难以有效消除,仍然是影响室内定位精度的关键问题之一。
3、特征聚类技术
在基于指纹信息的定位方法中,通常采用特征聚类技术将离群点剔除,以此减小离群点对定位结果的影响,提高定位精度。
⑴HiWL方法
聚类算法通常需要使用大量数据进行训练,但为指纹库中每个数据点进行位置标记是非常繁琐的,为此HiWL方法使用隐形马尔科夫模型 (HiddenMarkovModel,HMM)对未标记的数据进行位置分类。在训练阶段,该方法需要一定的室内拓扑信息。通过HMM训练,系统可以获得地理坐标和信号分布之间的映射关系,因此HiWL方法可以将未标记的指纹地图与地理坐标联系起来。但HMM 方法需要通过大量的训练数据集 保证学习结果的准确性,提高了系统的计算复杂度。
⑵UMLI方法
为了减少计算量,UMLI方法采用聚类方法对未标记数据进行分类。训练阶段通过聚类分析,将有相似特征的相邻参考点聚集为一类。以此将未标记的数据进行位置标记,减少测量和标记的工作量。UMLI方法首先将未标记的指纹地图映射到对应的房间中,然后在房间中进行精度更高的定位解算。UMLI方法通过采用分层定位的方法提高了房间定位的精度。
4、融合滤波技术
在室内环境下,单一的定位技术无法覆盖全部区域,且定位精度有限。因此需要使用多种传感器、多种定位信号定位。在此过程中就需要融合滤波技术将不同定位源的数据进行融合定位。
通常融合滤波分为三类,数据融合、特征融合和决策融合。表1所示为三类融合方法的一些相关特性。
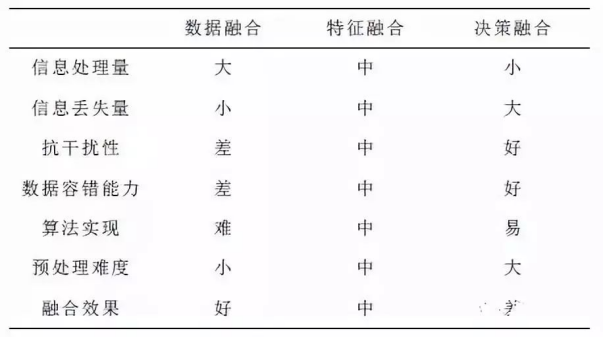
表1 不同融合方法的相关特性
根据处理结构的不同,也可以将融合滤波分为集中式、分布式和混合式。集中式融合滤波需要一个处理中心收集数据进行处理,而分布式融合滤波中每个传感器、定位信号接收器单独处理自己的数据,并将结果发送到进行全局分析的节点。混合式融合滤波中一部分传感器和定位信号接收器自己进行数据的预处理,而处理中心也会对一些原始数据进行融合并进行最后的决策融合。
如果一个系统中信号源产生的是相同物理测量量,那么就可以进行数据融合;相反若系统中的原始数据是异构的,那么就不能直接进行数据融合,需要提高到特征或决策融合的高度。
结论
本文对目前室内定位技术进行了简单介绍,分别针对不同种类的主流定位手段,进行了详细介绍与分析,并对室内定位中常见的技术问题进行了讨论。通过对比分析,可以得到如下结论:
1)室内定位技术发展迅速,亚米级及厘米级的高精度位置服务需求广泛;
2)室内定位技术种类繁多,不同技术之间各有优缺点,广域与局域定位技术形成一定互补;
3)组合导航与多系统融合定位可有效提高定位精度及定位鲁棒性;4)导航通信一体化技术具有成本低、精度高等优点,并易于与其他定位系统融合,成为未来室内外定位技术的研究热点之一。
随着人们对室内位置服务需求的持续增加,室内定位技术将会得到进一步发展。新一代通信技术的发展,会大幅推动室内定位技术的进步,毫米波及MIMO技术的应用,可有效增加测距精度并提高定位终端的抗多径能力。低成本亚米级甚至厘米级的室内定位技术成为今后的研究趋势与热点。

