
热门标签
热门文章
- 1java+springboot的大学生心理健康测试测评系统vue_大学生心理健康测评系统研究意义
- 2Kubernetes(k8s):部署、使用 metrics-server
- 3如何在尽量不损害画质的前提下降低视频占内存大小?视频格式科普及无损压缩软件推荐
- 4用python实现入门级NLP_sent_tokenize
- 5Midjourney 提示词工具(10 个国内外最好最推荐的)_midjourney prompt helper
- 6视觉理解论文系列(三)VL-BERT: PRE-TRAINING OF GENERIC VISUALLINGUISTIC REPRESENTATIONS_vl-bert: pre-training of generic visual-linguistic
- 7毕设项目分享 基于深度学习的图像修复算法 DCGAN
- 8轻量化网络总结[1]--SqueezeNet,Xception,MobileNetv1~v3_bottleneck结构的改进
- 9Android————一个简单的新闻面板_安卓实现一个新闻页面
- 10程序员请收好:10个非常实用的 VS Code 插件
当前位置: article > 正文
智能车图像处理12-进阶篇4--环岛辅助判断条件_智能车摄像头环岛处理
作者:笔触狂放9 | 2024-04-07 22:13:48
赞
踩
智能车摄像头环岛处理
前言
希望大家多多点赞评论收藏哦,不懂的地方评论区留言就好。
这篇文章主要讲述智能车图像处理中环岛辅助判断相关内容。
一、图解分析
思路讲解:
环岛辅助条件用于决定是否进入环岛判断函数
下面的辅助条件主要有两个方面:
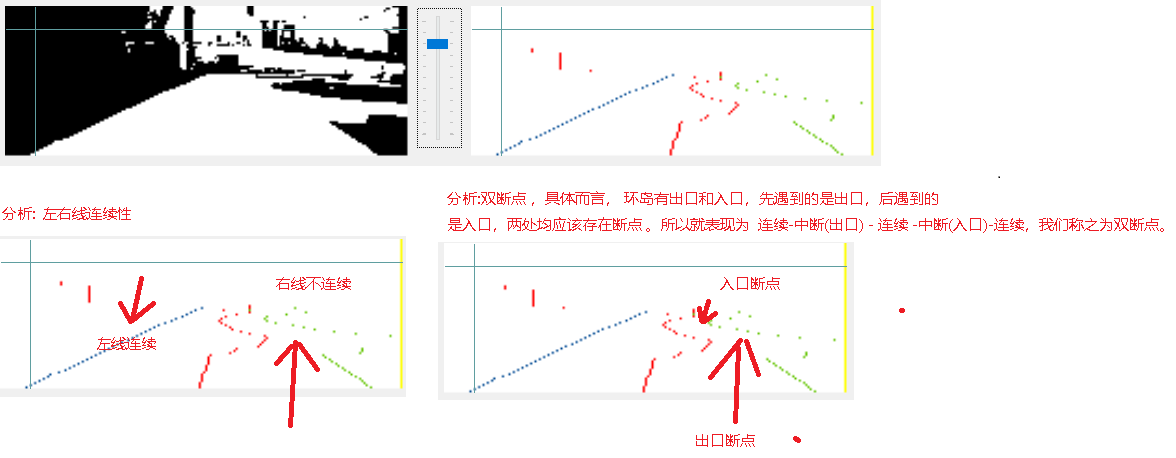
(1)环岛所在边在赛道上必须有两个断点 比如0-20连续 20-23空缺
24-30连续 31-35空缺 36-40连续 这两个空缺处就是环岛的入口和出口
(2)对于环岛来说 存在入口和出口的边的偏方差(我自己定义的函数,可以
直接类比方差)很大 而另一边则几乎是一条直线,偏方差很小
请看赛道分析
二、文字分析
主函数:
第6行: 含义是当前需要不在坡道和车库状态
第11-12行 : 寻找一下环岛的双断点(在辅助函数中)
第16-66行: 当左右线的方差满足一边很大,一边很小时,truepianfangflag /truepianfangflagforleft 置1,在环岛的判断中使用。
辅助函数:
双断点函数(左与右相似,以做为例):
第13-28行: 第一处断点
第29-40行: 第一处断点后 连续边线
第41-52行: 第一处连续后,第二处断点
第53-64行: 第二处断点后,第二处连续
至此,成功寻找到双断点
<
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/380987?site
推荐阅读
相关标签

