
热门标签
热门文章
- 1python用turtle画国旗
- 2【大数据】Flink 详解(五):核心篇 Ⅳ(反压、序列化、内存模型)
- 3windows安装Git LFS
- 4Android Studio修改项目包名
- 5git的分支_git 分支
- 6TRANSFORMER TRANSDUCER: A STREAMABLE SPEECH RECOGNITION MODELWITH TRANSFORMER ENCODERS AND RNN-T_transformer_transducer 训练
- 7PSO-GA即粒子群算法与遗传算法结合,解决TSP问题
- 8【SQL Server】三种基本表的删除方式(drop,delete,truncate)辨析_delete table
- 9ctf在线工具网站合集_在线彩虹表网址
- 10web漏洞之文件上传漏洞
当前位置: article > 正文
MPU6050姿态解算——Mahony互补滤波_acc_gain * g
作者:笔触狂放9 | 2024-04-11 09:42:00
赞
踩
acc_gain * g
引入
DMP与互补滤波数据对比
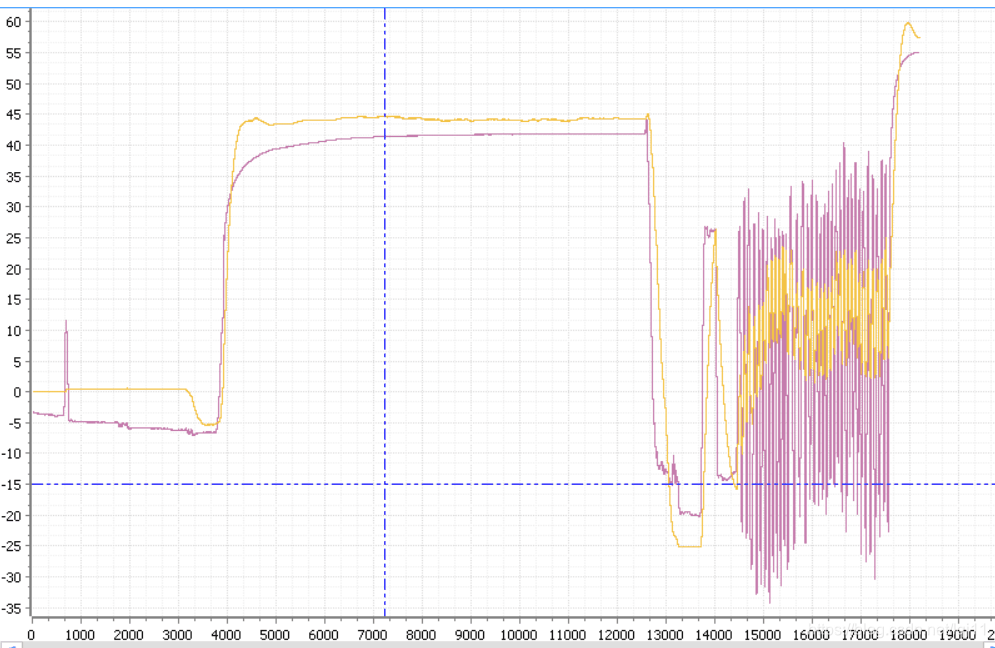
Long time no see,首先放一张图,黄色的是DMP获取的Pitch角数据,紫红色的是互补滤波解算的Pitch角数据(人为晃动陀螺仪增加了干扰)。
DMP与互补滤波的优缺点分析
| DMP | 互补滤波 |
|---|---|
| 不需要了解姿态解算知识,直接调用库函数,操作简单 | 需要掌握一定的姿态解算知识 |
| 解算速度慢,最大只能到200Hz | 速度快,而且随着单片机主频提高会更快 |
| 真实性差 | 真实性较好 |
从上面的曲线图结合我实际的干扰,在我大范围晃动陀螺仪的时候,DMP的角度变化还是很小,感觉是为了滤波而滤波,数据的真实性不可靠。而且在动态曲线观察的时候,互补滤波明显比DMP得到的的数据更快,时效性也
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/404211
推荐阅读
相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

