
- 1WebStorm: Emmet语法快速创建无意义的文字_webstorm lorem
- 2数据库大作业——基于qt开发的图书管理系统 (一)环境的配置与项目需求的分析
- 3云和恩墨zData X与星瑞格SinoDB完成产品兼容互认证
- 4JDK版本新特性介绍&JDK1.6_jdk1.6后的编译器与之前的版本的编译器有什么不同?
- 5yolov8添加ca注意力机制_yolov8+ca注意力机制
- 6Android P使用pm install安装apk报错_adb system server has no access to read file conte
- 7GitHub下载项目并运行_github的项目依赖下载
- 8GIT常用操作
- 9h5与原生app通讯(WebViewJavascriptBridge)_h5使用webviewjavascriptbridge
- 10上门服务小程序源码 家政小程序源码 同城到家小程序源码
[平衡小车]基于stm32Hal库编写的平衡小车全过程记录及心得_hal库平衡小车
赞
踩
零、前言
这是我的第一个全栈工程。
“平衡小车”这个想法源于去年暑假电赛的备赛期间,到了刚刚结束的寒假,终于有时间去做了,我一开始规划从零开始在一周内完成,但是遇到的困难与挑战远超预期,中间走了非常多的弯路,最后前前后后用了将近两个月的时间(现在来看,如果一切顺利+熟练,在一周内完成也不是问题)。
在做工程的过程中,吃了太多的苦,掉了太多的坑,感觉把所有的坎都走了一遍。但也正因如此,现在的成果才弥足珍贵,感谢坚持下来的自己。
一、概述
(一)演示
【平衡小车】基于stm32HAL库编程的全栈开发平衡小车
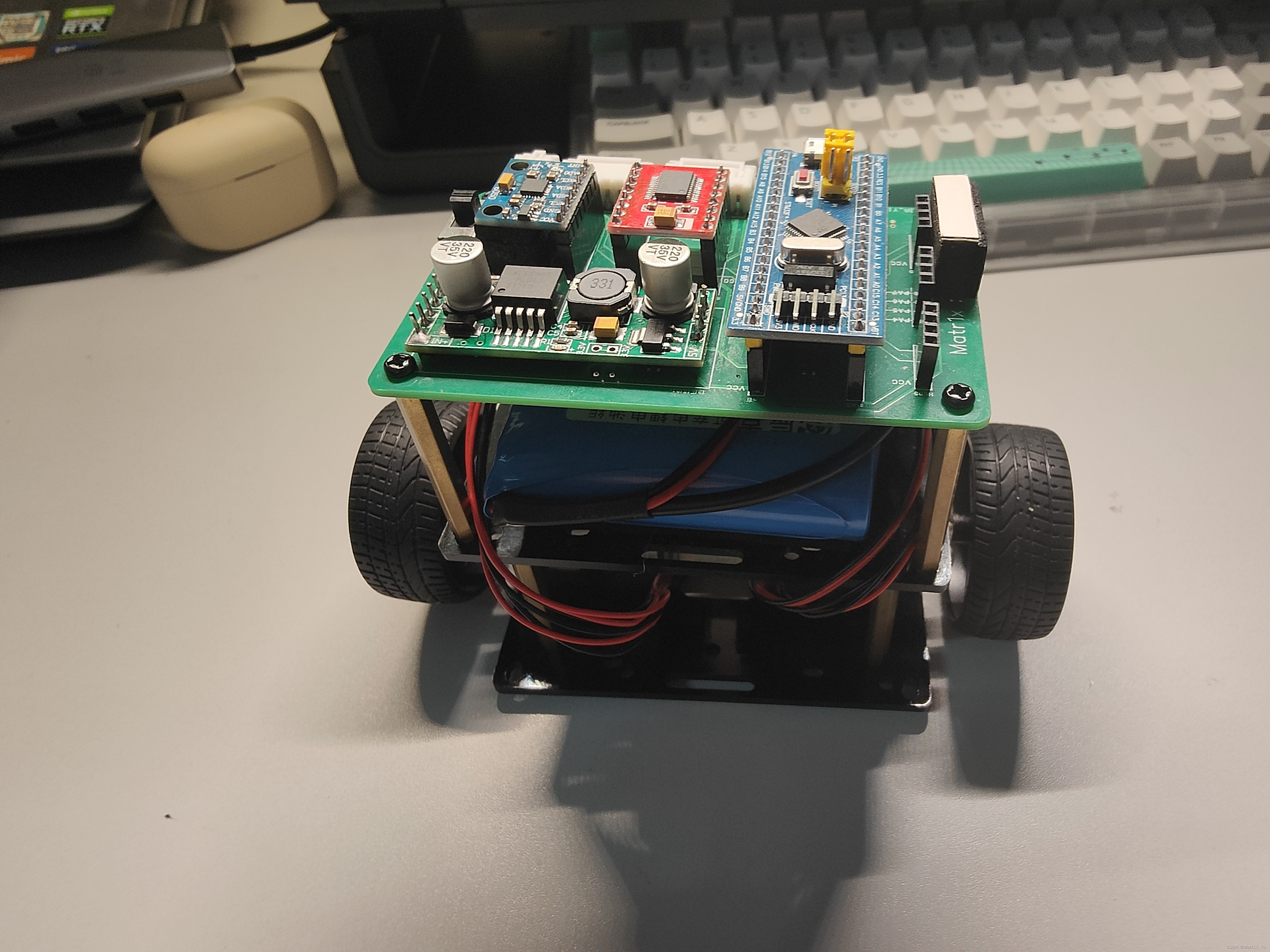
(二)结构
项目可分为“硬件”、“软件”两大部分:
硬件部分包括画原理图、画pcb板、购买硬件、组装焊接
软件部分包括stm32初始化、获取传感器参数、pid调试(也是最令人头疼、最费时间的部分)
(三)踩过的坑(血泪史)
1.型号错误,一开始用的陀螺仪和6050长的很像,但是dmp解算函数不一样。代价:四天
2.多买易损件!!!小车震荡没有及时关闭,一共烧毁两块电机驱动,并且在万用表排插问题的时候,顺便把主控短路了。代价:20天的快递时间(第一块电机驱动在春节前5天买的,结果初九才送到,麻了),以及很多钱/(ㄒoㄒ)/~~
3.PID极性,一定要先解决极性问题!代价:一个下午。
4.小车应该放在桌子上启动,而不是放在架子上启动,再拿下来。代价:三天。
5.在调节速度环时,应该给小车足够的地方运动,其实我的小车在今天早上就平衡了,但是一直因为距离太短,我没有认为已经初步平衡了。代价:一天
6.串口的波特率一定要足够,实测115200波特率在10ms内打印四个.3f浮点数不成问题,而9600波特率只能1s传几个数据。代价:很不方便
7.最好买一个usb拓展坞,我的电脑只剩一个usb接口,很不方便。代价:很不方便
......
二、硬件
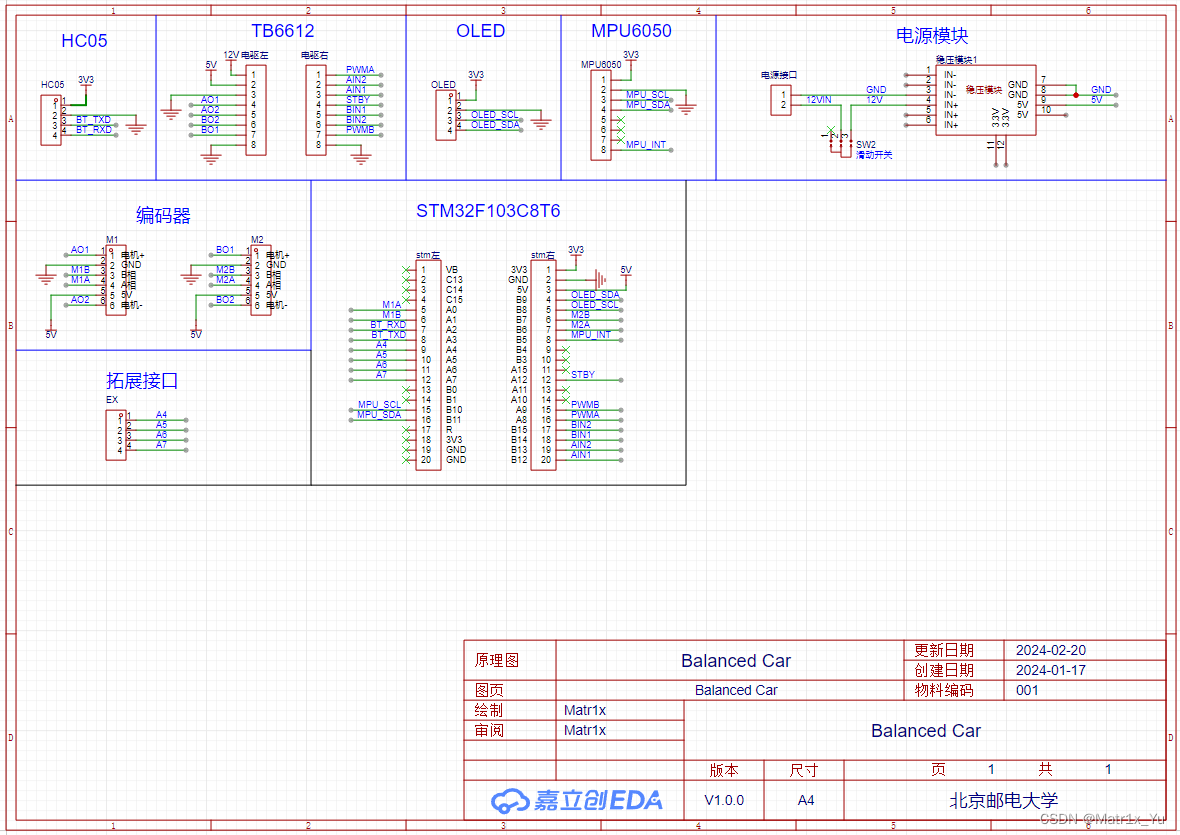
(一)原理图
用嘉立创专业版画的图,方便下单,最主要的是能白嫖打板【doge】。
第一次画板还不太熟,忘记加指示灯啥的了,也没有加电容滤波,但目前看来没啥事。
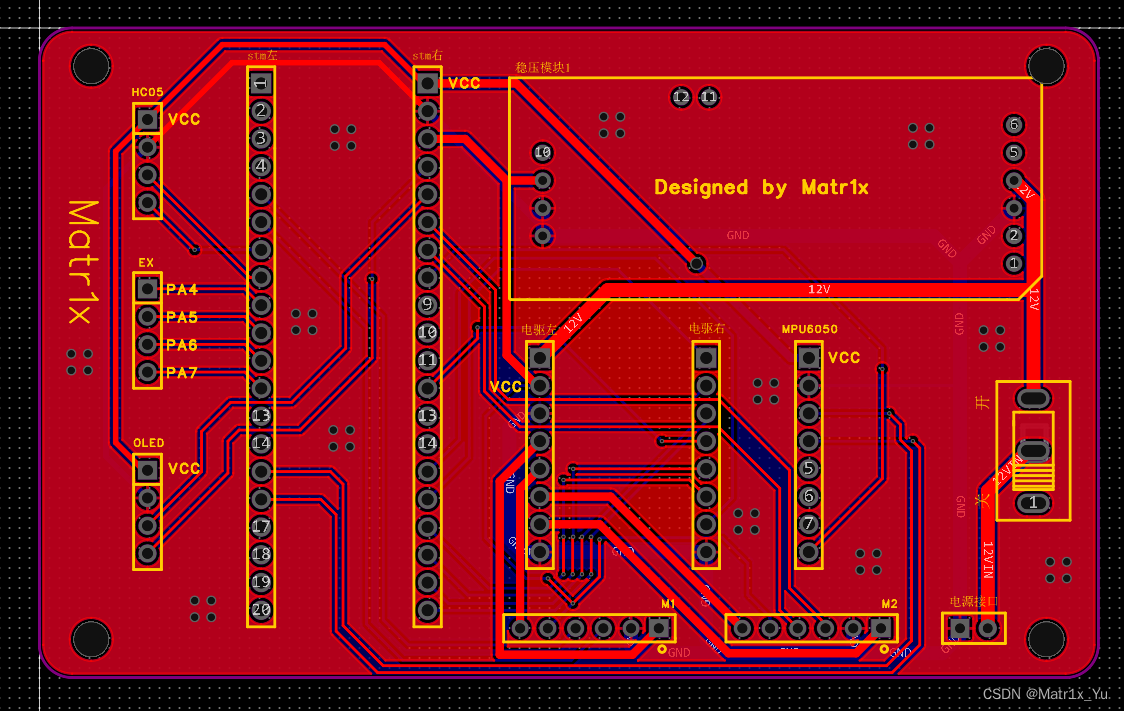
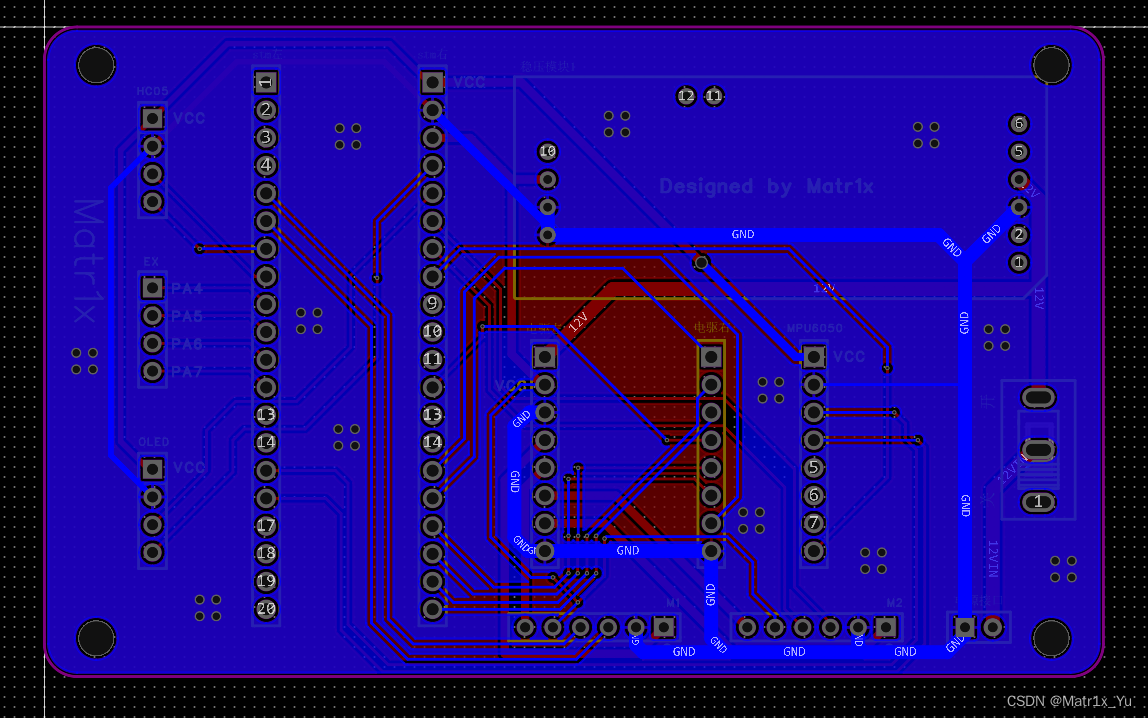
(二)PCB
可以私聊我购买成品,我有现成的富裕板子。
(三)硬件选购
主控:stm32f103c8t6 便宜+资源多
陀螺仪:mpu6050 资源多
电机驱动:tb6612 发热小 强烈建议多买几块!!!
稳压模块:XL2596 12v-5v
电池:12v
屏幕:0.96英寸
电机:带霍尔编码器,型号忘了
蓝牙模块:HC05
其他:底座(建议买两套)、排母、排针、端子、开关...
三、软件
调用及初始化见完整工程,此处只写pid部分的内容。
(一)编码器
读取编码器的瞬时值,再立刻清零,此时数值即可当作轮子的瞬时速度。
- encoder_L=-(short)__HAL_TIM_GET_COUNTER(&htim4);
- __HAL_TIM_SET_COUNTER(&htim4,0);
-
- encoder_R=(short)__HAL_TIM_GET_COUNTER(&htim2);
- __HAL_TIM_SET_COUNTER(&htim2,0);
(二)直立环
直立环是使小车平衡最核心的部分,但是只有直立环,做不到平衡,在理想情况下,会一直向一个方向倒去。
直立环的输入是平衡方向的角度和角加速度,输出是pwm值。直立环采用PI控制,Kp是比例系数,用于宏观上的调整,但是会产生震荡;Ki是微分系数,用于超前预测,能够修正超调现象,从而稳定Kp造成的震荡。
极性:分别调节Kp和Ki(此时另一个为0),若轮子转动方向与倾倒方向一致,则正确。
大小:单独调节Kp,逐渐增大,当小车出现大幅低频震荡时,立刻关闭电机,记录此时数据为Kp_max。单独调节Kp,逐渐增大,当小车出现小幅高频震荡时,立刻关闭电机(建议不要超过2s,我烧了两块电机驱动才知道),记录此时数据为Ki_max。此时,直立环Kp=0.6*Kp_max,Ki=0.6*Ki_max。运用此时的数据,小车应不出现抖动,并且会向一个方向倾倒。
定义PID结构体
- struct pid{
- float Kp;
- float Ki;
- float Kd;
- float val;
- float val_last;
- float val_err;//与期望差值
- float val_err_last;
- float val_delta;//与上一次差值
- float val_sum;
- float val_exp;
-
- float result;
- };
直立环PI控制代码
- float Vertical_PID(float roll,short gx)
- {
- Vertical.Kp=14;//需根据自己的代码修改
- Vertical.Kd=0.055;//需根据自己的代码修改
- Vertical.val_exp=2.5;//机械中值,即小车在未上电情况下的平衡位置,与硬件结构有关
- Vertical.val=roll;
- Vertical.val_delta=-(float)gx;
-
- Vertical.val_err=Vertical.val_exp-Vertical.val;
-
- Vertical.result=Vertical.Kp * Vertical.val_err + Vertical.Kd * Vertical.val_delta;
-
- Vertical.val_last=Vertical.val;
-
- return Vertical.result;
- }

(三)速度环
小车若想真正实现平衡,还需要速度环的配合。速度环的作用是使小车保持一个恒定的速度,此时的理想速度即为0。
速度环的输入为两编码器的速度,这里利用读取编码器cnt值再清零的方式代替速度,输出为pwm值。速度环采用PD控制,P用于速度的比例控制,D用于积分,积分结果为移动的路程,路程越大,说明距离最初的平衡位置越远,则反馈越大,这就是单纯直立环所缺少的反馈。
极性:Kp与Kd同极性,转动轮子,若轮子逐渐加快速度,则正确,反之,若其向相反方向转动,则错误。
大小:根据经验,Kp=200Kd。在刚刚调好的速度环的前提下,逐渐增大Kd值,若出现在一定范围内平衡迹象,则代码正确,继续调大,直到在小范围内往复运动,此时抖动会很严重,需及时关闭电机。这时的Kp(Kd)即为速度环的参数。此时需要回调直立环的Kp与ki用于消除抖动,一般情况下,需大幅减小Kp。
速度环PD控制代码
- float Velocity_PID(int Encoder_L_speed,int Encoder_R_speed)
- {
- Velocity.Kp=30;
- Velocity.Ki=Velocity.Kp/200;
- Velocity.val_exp=0;//期望速度
- Velocity.val=Encoder_L_speed + Encoder_R_speed - Velocity.val_exp;
-
- float a = 0.7;
- Velocity.val_err=Velocity.val_exp - Velocity.val;
- Velocity.val_err=(1-a)*Velocity.val_err - a*Velocity.val_err_last;//一阶滤波,使小车平稳
- Velocity.val_err_last=Velocity.val_err;
-
- Velocity.val_sum+=Velocity.val_err;
- Velocity.val_sum=velocity_sum_restrict(Velocity.val_sum);//积分限幅
-
- Velocity.result=Velocity.Kp * Velocity.val_err + Velocity.Ki * Velocity.val_sum;
-
- return Velocity.result;
- }
(四)转向环
用于消除两轮的误差,使小车直线运动,没啥可调的,只要速度别太高就行。
- float Turn_PID(float yaw)
- {
- Turn.Kp=10;
- Turn.val=yaw;
- Turn.val_exp=0;
-
- Turn.val_err=Turn.val_exp - Turn.val;
-
- Turn.result=Turn.Kp * Turn.val;
-
- return Turn.result;
- }
(五)其他
总输出
- Vertical_result=Vertical_PID(roll,gx);//直立环
-
- Velocity_result=Velocity_PID(encoder_L,encoder_R);//速度环
-
- Turn_result=Turn_PID(yaw);//转向环
-
- result=speed_restrict(Vertical_result+Velocity_result);//输出限幅
-
- if(fabs(result)>=20)
- {
- Motor_Move(LEFT,result-Turn_result/2);
- Motor_Move(RIGHT,result+Turn_result/2);
- }
限速函数
- float speed_restrict(float speed)
- {
- int max_speed = 500;
- if(speed>=max_speed)
- speed = max_speed;
- else if(speed<=-max_speed)
- speed = -max_speed;
- return speed;
- }
积分限幅函数
- float velocity_sum_restrict(float velocity_sum)
- {
- int max_velocity_sum=12000;
- if(velocity_sum>=max_velocity_sum)
- velocity_sum=max_velocity_sum;
- else if(velocity_sum<=-max_velocity_sum)
- velocity_sum=-max_velocity_sum;
- return velocity_sum;
- }

