
热门标签
热门文章
- 1设计模式--模板方法(Template Method)_template mothod 模式学生体检分析系统
- 2谈谈Tcpserver开启多线程并发处理遇到的问题!
- 3PyCharm安装教程(图文结合,超详细,小白安装必看)_pycharm最新安装教程
- 4【jenkins】jenkins流水线构建打包jar,生成docker镜像,重启docker服务的过程,在jenkins上一键完成,实现提交代码自动构建的功能_如何使用jenkins将jar包打包成docker镜像
- 5基于STM32+微信小程序设计的宠物投喂装置(腾讯云IOT)_宠物投喂小程序
- 6基于Springboot框架实现点餐平台网站系统【源码+论文】展示_spring boot框架 点菜系统
- 7YOLOV1-V9发展历程(1) (V1-V5)
- 8软件工程期末复习题库_软件设计的质量取决于设计的有效性和可行性,与实现的技术无关。
- 9高翔博士Faster-LIO论文和算法解析
- 10为什么有的测试员路越走越窄?原因在这里_软件测试 路窄
当前位置: article > 正文
单片机 MPU6050 计步器 正点原子 STM32_dmp_get_pedometer_step_count
作者:笔触狂放9 | 2024-04-30 09:46:32
赞
踩
dmp_get_pedometer_step_count
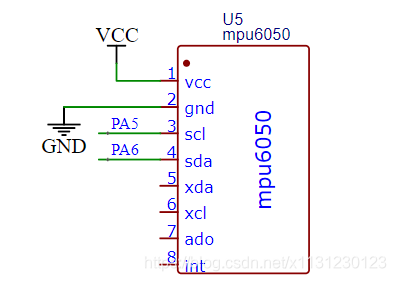
MPU6050芯片内部的DMP模块自带了姿态角检测和计步器等功能,不用自己想一个计步器算法才去搞,直接用现成的比自己想的准得多。只需要调用函数即可获取步数,详细可以看原子哥给的例程。
使用stm32单片机,然后使用移植好的驱动。
然后这样做即可获得步数,是6050传感器内部自带的一个功能。
unsigned long STEPS = 0;
dmp_get_pedometer_step_count(&STEPS);
- 1
- 2
清空步数:
dmp_set_pedometer_step_count(0);//Çå¿Õ²½Êý
- 1
以同样的方法还可以获取走路的时间,以及清空走路的时间。
int dmp_get_pedometer_walk_time(unsigned long *time);
int dmp_set_pedometer_walk_time(unsigned long time);
- 1
- 2
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/512704
推荐阅读

相关标签

