- 1VMware Esxi6.5安装教程(图文安装)
- 2机器视觉抓取(0)——Yolov5_v6.1部署训练及代码解读(我的入门篇,之后均以V6.0版本开展)_yolov5代码
- 3基于JavaWeb的餐厅点餐系统设计与实现_javaweb点餐系统
- 4网络数据传输安全及SSH与HTTPS工作原理_ssh靠什么完成完整性检测
- 5最新abogus算法还原之传参加密_抖音abogus逆向
- 6OCR论文笔记系列(二): ASTER文字识别
- 7联邦学习【分布式机器学习技术】【①各客户端从服务器下载全局模型;②各客户端训练本地数据得到本地模型;③各客户端上传本地模型到中心服务器;④中心服务器接收各方数据后进行加权聚合操作,得全局模型】_联邦学习每个客户端的训练集
- 8蜜罐的详细配置过程以及所需要的的软件!以及全部配置!_蜜罐参数优化
- 9二叉树之二叉树的深度
- 10【水声通信】基于matlab OFDM-QPSK水声通信仿真(含误码率)【含Matlab源码 3695期】_【水声自适应通信】基于ofdm的水声自适应调制通信系统性能matlab仿真
循环神经网络RNN_rnn unfold
赞
踩
目录
在前面的task学习了全连接神经网络和卷积神经网络,以及它们的训练和使用。他们都只能单独的取处理一个个的输入,前一个输入和后一个输入是完全没有关系的。但是,某些任务需要能够更好的处理序列的信息,即前面的输入和后面的输入是有关系的。比如,当我们在理解一句话意思时,孤立的理解这句话的每个词是不够的,我们需要处理这些词连接起来的整个序列;当我们处理视频的时候,我们也不能只单独的去分析每一帧,而要分析这些帧连接起来的整个序列。这时,就需要用到深度学习领域中另一类非常重要神经网络:循环神经网络(Recurrent Neural Network)。
循环神经网络基本原理
循环神经网络是一种人工神经网络,它的节点间的连接形成一个遵循时间序列的有向图,它的核心思想是,样本间存在顺序关系,每个样本和它之前的样本存在关联。通过神经网络在时序上的展开,我们能够找到样本之间的序列相关性。
- 文本:字母和词汇的序列
- 语音:音节的序列
- 视频:图像帧的序列
- 时态数据:气象观测数据,股票交易数据、房价数据等
RNN的一般结构
其中各个符号的表示:分别表示的是tt时刻的输入、记忆和输出,
是RNN的连接权重,
是RNN的偏置,
是激活函数,
通常选tanh或sigmoid,
通常选用softmax。
我们现在这样来理解,如果把上面有的那个带箭头的圈去掉,它就变成了最普通的全连接神经网络。
是一个向量,它表示输入层的值(这里面没有画出来表示神经元节点的圆圈);
是一个向量,它表示隐藏层的值(这里隐藏层面画了一个节点,这一层其实是多个节点,节点数与向量
的维度相同);
是输入层到隐藏层的权重矩阵,
也是一个向量,它表示输出层的值;
是隐藏层到输出层的权重矩阵。
那么,现在我们来看看是什么。循环神经网络的隐藏层的值
不仅仅取决于当前这次的输入
,还取决于上一次隐藏层的值
。权重矩阵
就是隐藏层上一次的值作为这一次的输入的权重。
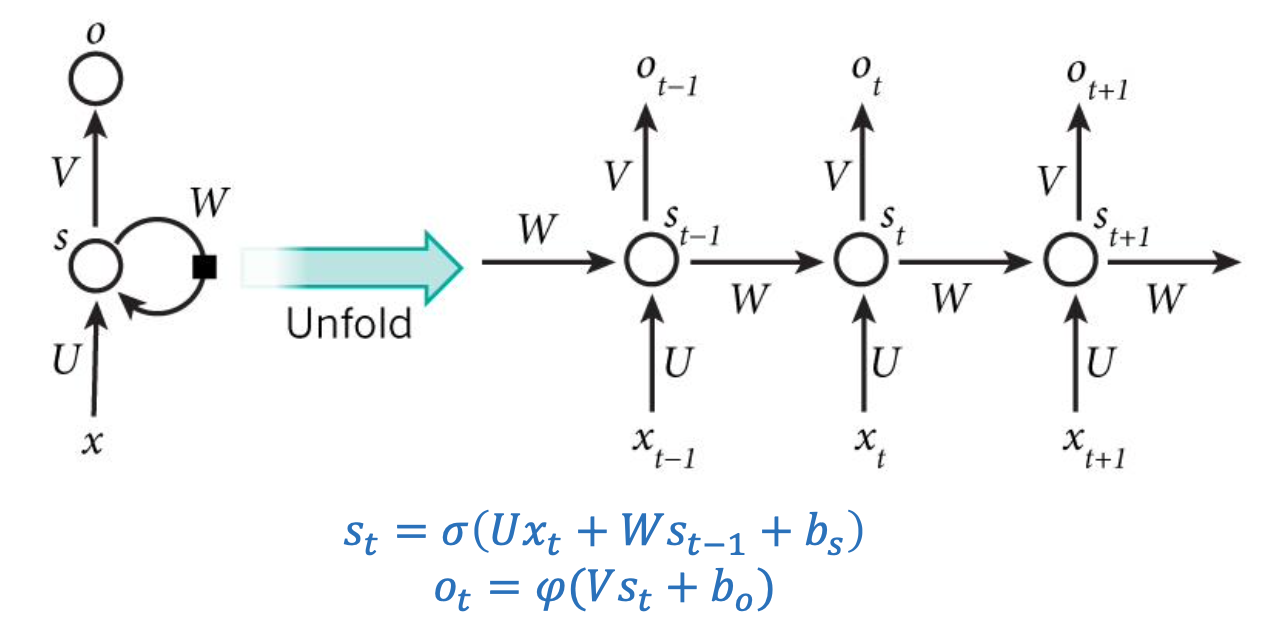
图右unfold是RNN按照时间线的展开,这个网络在t时刻接收到输入 之后,隐藏层的值是
,输出值是
。关键一点是,
的值不仅仅取决于
,还取决于
。我们可以用下面的公式来表示循环神经网络的计算方法:
其中 softmax 函数,用于分类问题的概率计算。本质上是将一个K维的任意实数向量压缩 (映射)成另一个K维的实数向量,其中向量中的每个元素取值都介于(0,1)之间。
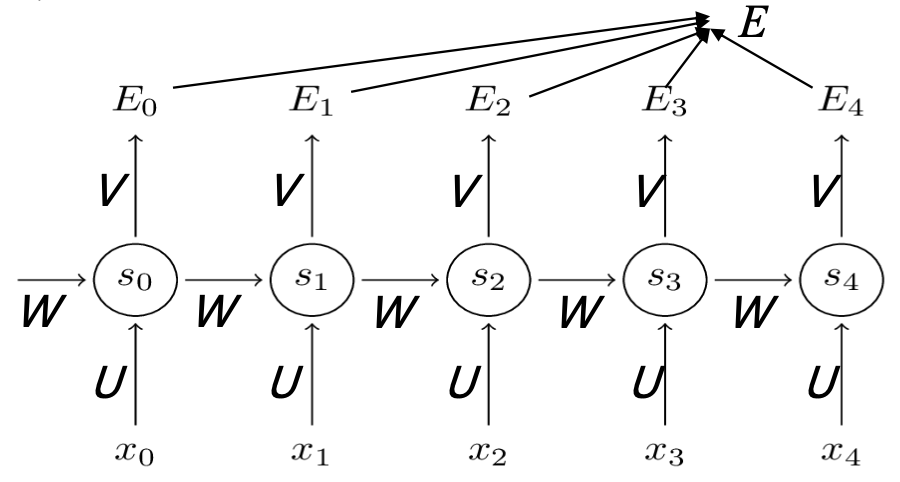
RNN训练算法 - BPTT
我们先来回顾一下BP算法,就是定义损失函数 Loss 来表示输出 和真实标签
的误差,通过链式法则自顶向下求得 Loss 对网络权重的偏导。沿梯度的反方向更新权重的值, 直到 Loss 收敛。而这里的 BPTT 算法就是加上了时序演化,后面的两个字母 TT 就是 Through Time。
我们先定义输出函数:
再定义损失函数:
以下为复合函数的链式求导过程


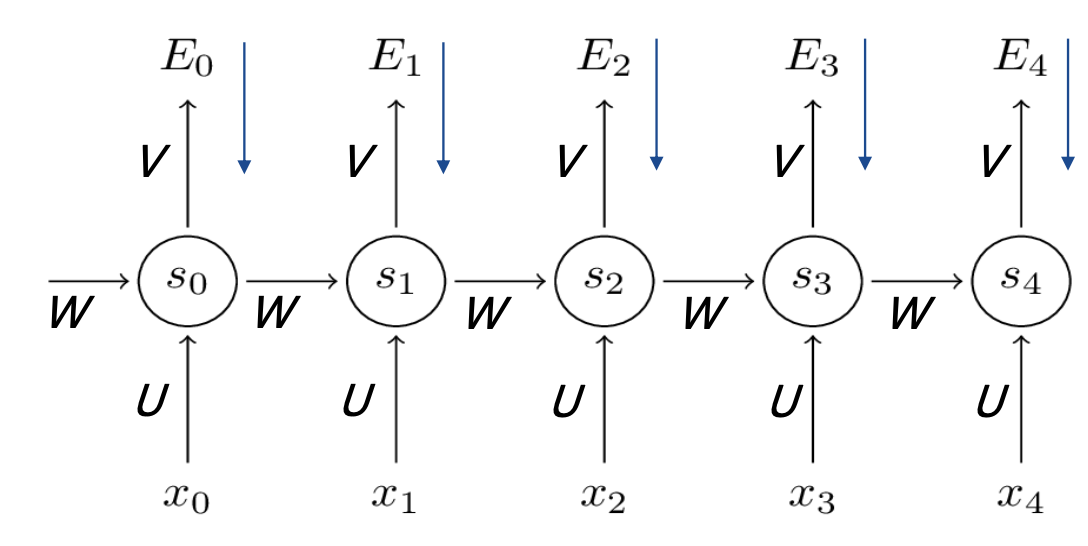
BPTT算法是针对循环层的训练算法,它的基本原理和BP算法是一样的,也包含同样的三个步骤:
- 前向计算每个神经元的输出值;
- 反向计算每个神经元的误差项值,它是误差函数E对神经元j的加权输入的偏导数;
- 计算每个权重的梯度。
最后再用随机梯度下降算法更新权重。
RNN的代码实现
完整代码参考GitHub:learn_dl/rnn.py at master · hanbt/learn_dl · GitHub
- import numpy as np
- from cnn import element_wise_op
- from activators import ReluActivator, IdentityActivator
-
- '''我们用RecurrentLayer类来实现一个循环层。下面的代码是初始化一个循环层,可以在构造函数中设置卷积层的超参数。我们注意到,循环层有两个权重数组,U和W
- '''
- class RecurrentLayer(object):
- def __init__(self, input_width, state_width,
- activator, learning_rate):
- self.input_width = input_width
- self.state_width = state_width
- self.activator = activator
- self.learning_rate = learning_rate
- self.times = 0 # 当前时刻初始化为t0
- self.state_list = [] # 保存各个时刻的state
- self.state_list.append(np.zeros(
- (state_width, 1))) # 初始化s0
- self.U = np.random.uniform(-1e-4, 1e-4,
- (state_width, input_width)) # 初始化U
- self.W = np.random.uniform(-1e-4, 1e-4,
- (state_width, state_width)) # 初始化W
-
- '''在forward方法中,实现循环层的前向计算,这部分比较简单。'''
- def forward(self, input_array):
- '''
- 根据『式2』进行前向计算
- '''
- self.times += 1
- state = (np.dot(self.U, input_array) +
- np.dot(self.W, self.state_list[-1]))
- element_wise_op(state, self.activator.forward)
- self.state_list.append(state)
-
- '''在backword方法中,实现BPTT算法。'''
- def backward(self, sensitivity_array,
- activator):
- '''
- 实现BPTT算法
- '''
- self.calc_delta(sensitivity_array, activator)
- self.calc_gradient()
-
- '''在update方法中,实现梯度下降算法'''
- def update(self):
- '''
- 按照梯度下降,更新权重
- '''
- self.W -= self.learning_rate * self.gradient
-
- def calc_delta(self, sensitivity_array, activator):
- self.delta_list = [] # 用来保存各个时刻的误差项
- for i in range(self.times):
- self.delta_list.append(np.zeros(
- (self.state_width, 1)))
- self.delta_list.append(sensitivity_array)
- # 迭代计算每个时刻的误差项
- for k in range(self.times - 1, 0, -1):
- self.calc_delta_k(k, activator)
-
- def calc_delta_k(self, k, activator):
- '''
- 根据k+1时刻的delta计算k时刻的delta
- '''
- state = self.state_list[k+1].copy()
- element_wise_op(self.state_list[k+1],
- activator.backward)
- self.delta_list[k] = np.dot(
- np.dot(self.delta_list[k+1].T, self.W),
- np.diag(state[:,0])).T
-
- def calc_gradient(self):
- self.gradient_list = [] # 保存各个时刻的权重梯度
- for t in range(self.times + 1):
- self.gradient_list.append(np.zeros(
- (self.state_width, self.state_width)))
- for t in range(self.times, 0, -1):
- self.calc_gradient_t(t)
- # 实际的梯度是各个时刻梯度之和
- self.gradient = reduce(
- lambda a, b: a + b, self.gradient_list,
- self.gradient_list[0]) # [0]被初始化为0且没有被修改过
-
- def calc_gradient_t(self, t):
- '''
- 计算每个时刻t权重的梯度
- '''
- gradient = np.dot(self.delta_list[t],
- self.state_list[t-1].T)
- self.gradient_list[t] = gradient
-
- '''循环层是一个带状态的层,每次forword都会改变循环层的内部状态,这给梯度检查带来了麻烦。因此,我们需要一个reset_state方法,来重置循环层的内部状态'''
- def reset_state(self):
- self.times = 0 # 当前时刻初始化为t0
- self.state_list = [] # 保存各个时刻的state
- self.state_list.append(np.zeros(
- (self.state_width, 1))) # 初始化s0
-
-
- def data_set():
- x = [np.array([[1], [2], [3]]),
- np.array([[2], [3], [4]])]
- d = np.array([[1], [2]])
- return x, d
-
- '''最后,是梯度检查的代码'''
- def gradient_check():
- '''
- 梯度检查
- '''
- # 设计一个误差函数,取所有节点输出项之和
- error_function = lambda o: o.sum()
-
- rl = RecurrentLayer(3, 2, IdentityActivator(), 1e-3)
-
- # 计算forward值
- x, d = data_set()
- rl.forward(x[0])
- rl.forward(x[1])
-
- # 求取sensitivity map
- sensitivity_array = np.ones(rl.state_list[-1].shape,
- dtype=np.float64)
- # 计算梯度
- rl.backward(sensitivity_array, IdentityActivator())
-
- # 检查梯度
- epsilon = 10e-4
- for i in range(rl.W.shape[0]):
- for j in range(rl.W.shape[1]):
- rl.W[i,j] += epsilon
- rl.reset_state()
- rl.forward(x[0])
- rl.forward(x[1])
- err1 = error_function(rl.state_list[-1])
- rl.W[i,j] -= 2*epsilon
- rl.reset_state()
- rl.forward(x[0])
- rl.forward(x[1])
- err2 = error_function(rl.state_list[-1])
- expect_grad = (err1 - err2) / (2 * epsilon)
- rl.W[i,j] += epsilon
- print 'weights(%d,%d): expected - actural %f - %f' % (
- i, j, expect_grad, rl.gradient[i,j])
-
-
- def test():
- l = RecurrentLayer(3, 2, ReluActivator(), 1e-3)
- x, d = data_set()
- l.forward(x[0])
- l.forward(x[1])
- l.backward(d, ReluActivator())
- return l

实践中经典的RNN
RNN的梯度爆炸和消失问题
实践中前面介绍的RNN并不能很好的处理较长的序列。一个主要的原因是,RNN在训练中很容易发生梯度爆炸和梯度消失,这导致训练时梯度不能在较长序列中一直传递下去,从而使RNN无法捕捉到长距离的影响。
通常来说,梯度爆炸更容易处理一些。因为梯度爆炸的时候,我们的程序会收到NaN错误。我们也可以设置一个梯度阈值,当梯度超过这个阈值的时候可以直接截取。
梯度消失更难检测,而且也更难处理一些。总的来说,我们有三种方法应对梯度消失问题:
- 合理的初始化权重值。初始化权重,使每个神经元尽可能不要取极大或极小值,以躲开梯度消失的区域
- 使用relu代替sigmoid和tanh作为激活函数
- 使用其他结构的RNNs,比如长短时记忆网络(LTSM)和Gated Recurrent Unit(GRU),这是最流行的做法
LSTM
LSTM,即长短时记忆网络,于1997年被Sepp Hochreiter 和Jürgen Schmidhuber提出来,LSTM是一种用于深度学习领域的人工循环神经网络(RNN)结构。一个LSTM单元由输入门、输出门和遗忘门组成,三个门控制信息进出单元。
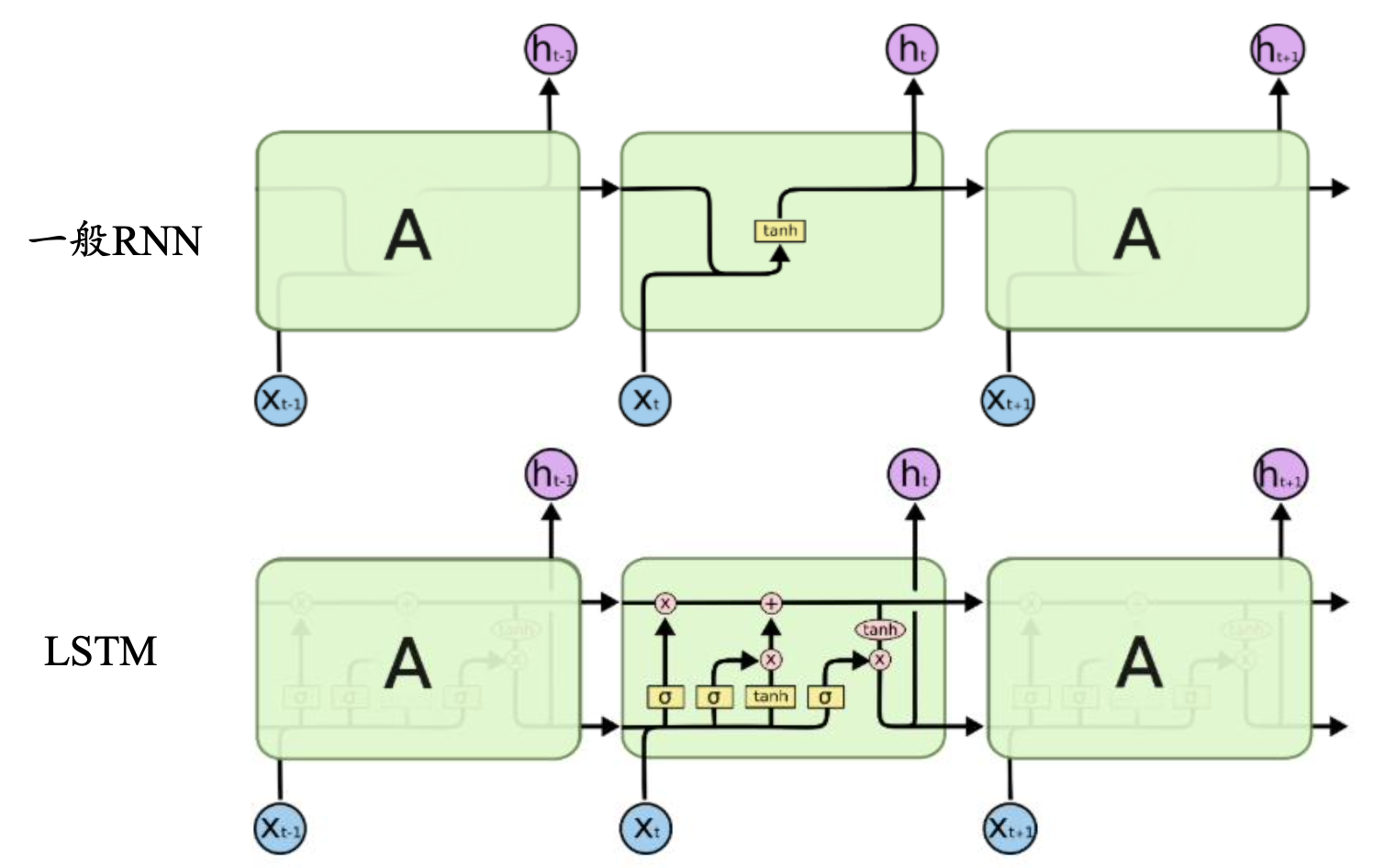
- LSTM依靠贯穿隐藏层的细胞状态实现隐藏单元之间的信息传递,其中只有少量的线性操作
- LSTM引入了“门”机制对细胞状态信息进行添加或删除,由此实现长程记忆
- “门”机制由一个Sigmoid激活函数层和一个向量点乘操作组成,Sigmoid层的输出控制了信息传递的比例
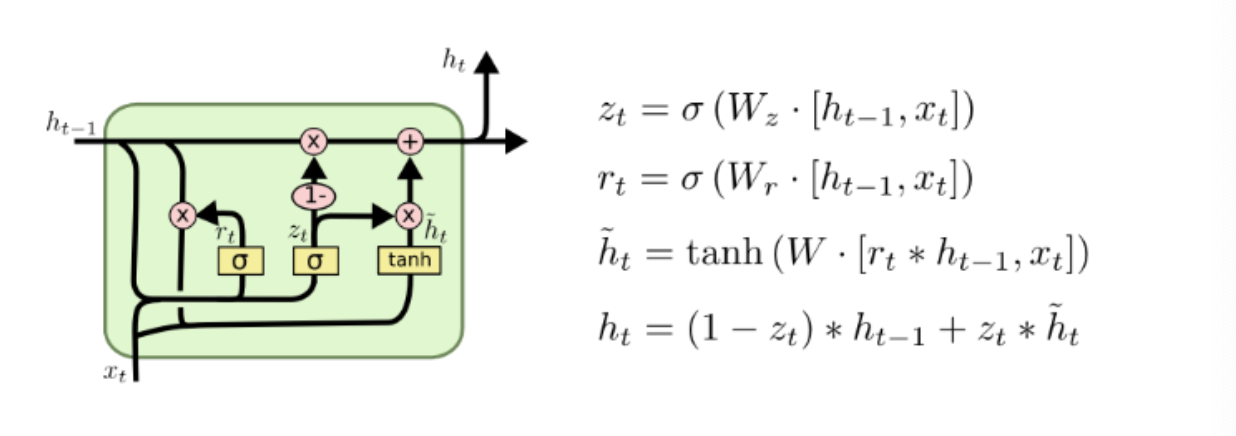
Gated Recurrent Unit (GRU)
Gated Recurrent Unit (GRU),是在2014年提出的,可认为是LSTM 的变种,它的细胞状态与隐状态合并,在计算当前时刻新信息的方法和LSTM有 所不同;GRU只包含重置门和更新门;在音乐建模与语音信号建模领域与LSTM具有相似的性能,但是参数更少,只有两个门控。
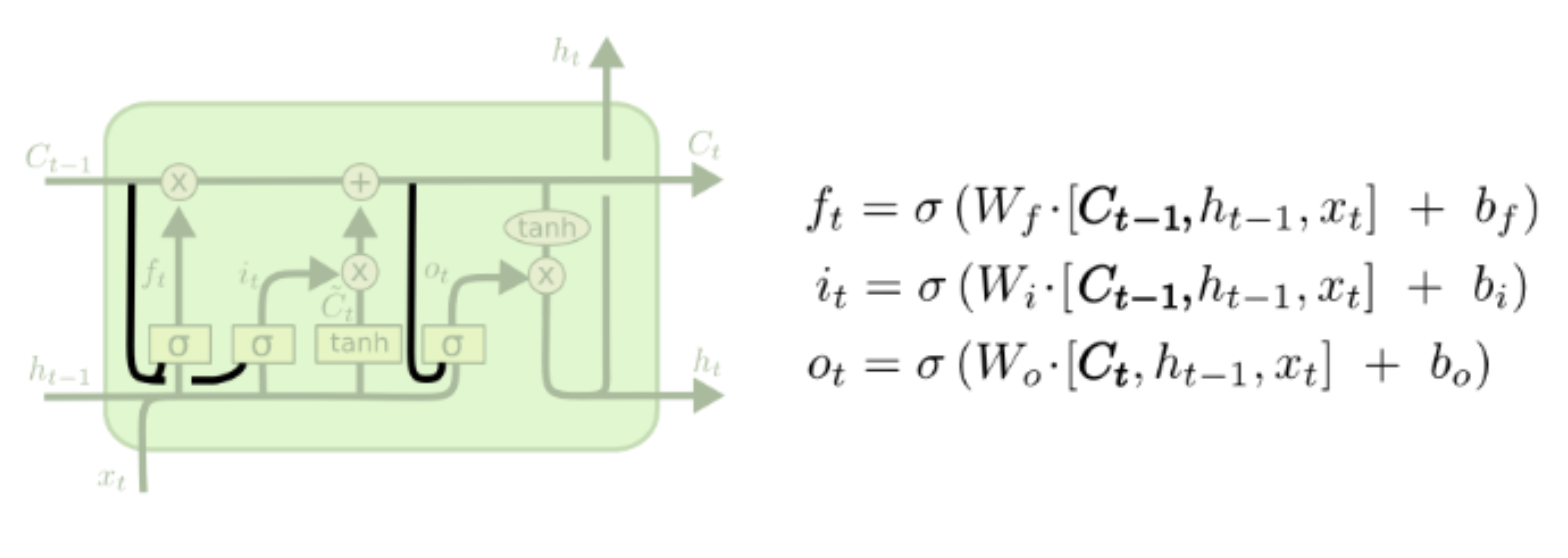
Peephole LSTM
让门层也接受细胞状态的输入,同时考虑隐层信息的输入。
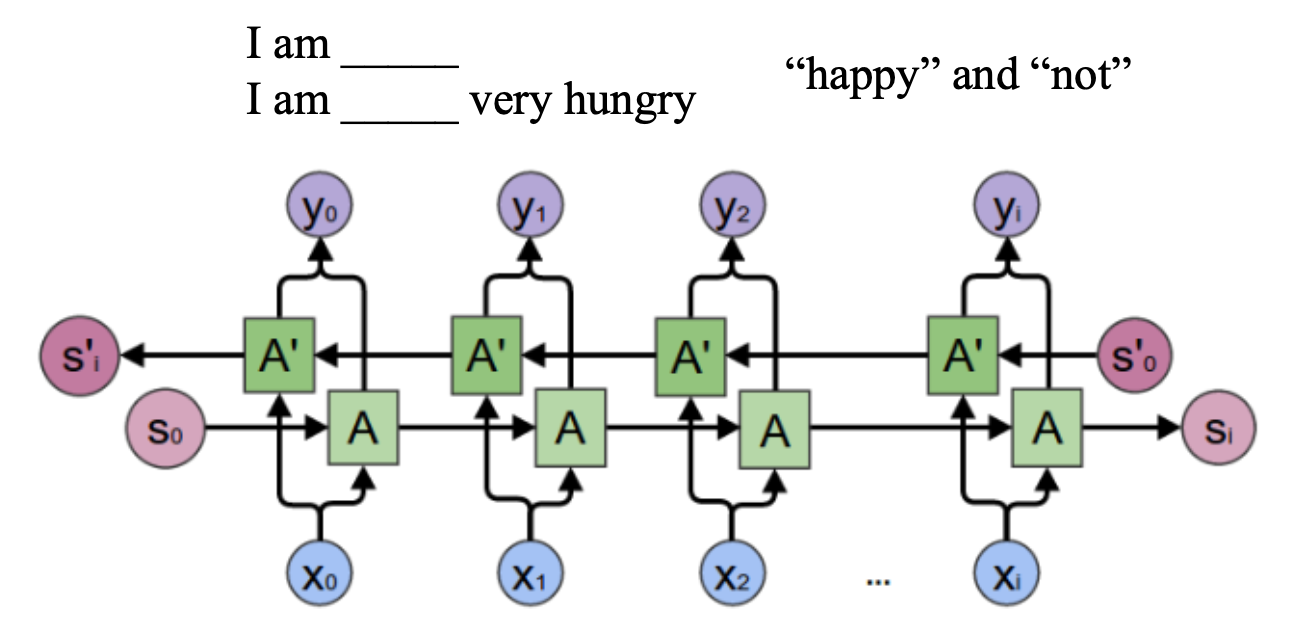
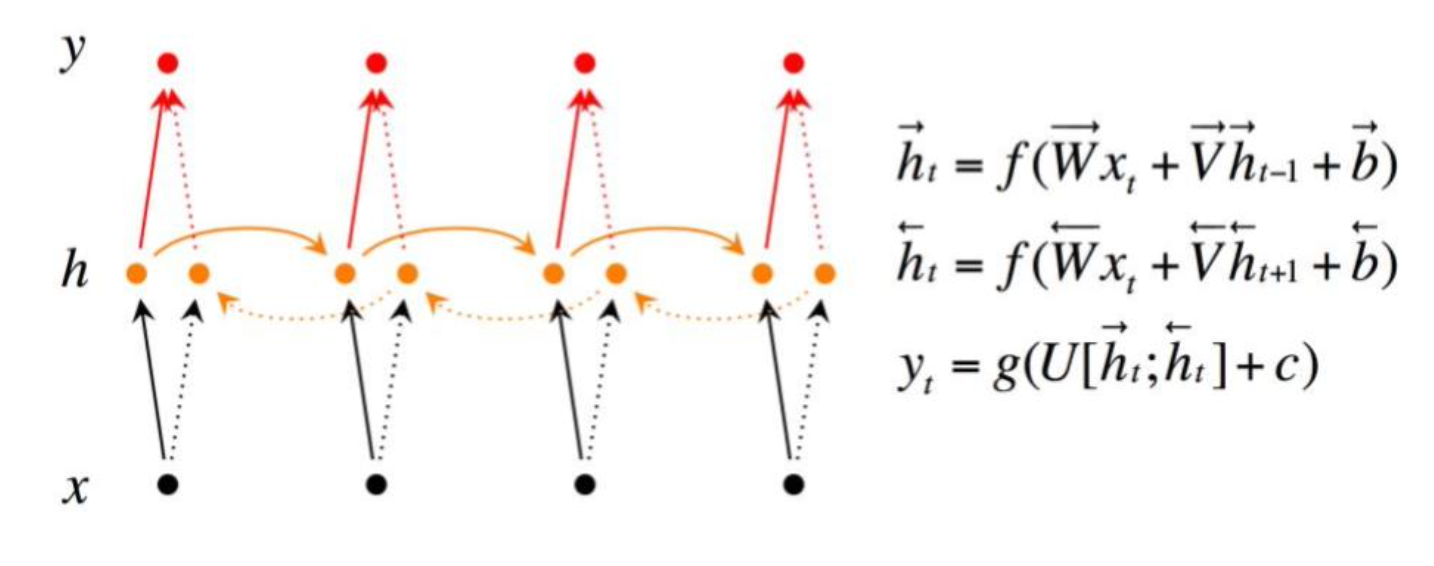
Bi-directional RNN(双向RNN)
Bi-directional RNN(双向RNN)假设当前t的输出不仅仅和之前的序列有关,并且还与之后的序列有关,例如:完形填空,它由两个RNNs上下叠加在一起组成,输出由这两个RNNs的隐藏层的状态决定。
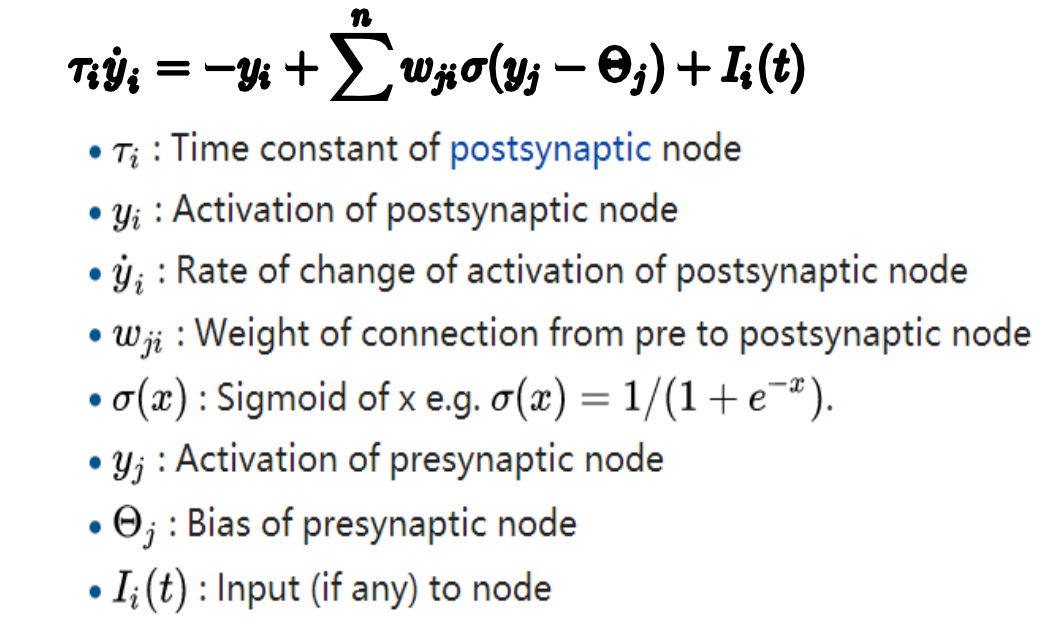
Continuous time RNN(CTRNN)
CTRNN利用常微分方程系统对输入脉冲序列神经元的影响 进行建模。CTRNN被应用到进化机器人中,用于解决视觉、协作和最 小认知行为等问题。