
- 1七夕情侣浪漫表白html网页js特效代码 七夕情人节表白示爱网站源码制作_情侣视频源码
- 2文心智能体平台快速创建一个HY(Lisp)编程小助手
- 3Python多功能的智能个人助理
- 49个基于Java的搜索引擎框架
- 5【git】git中的origin是什么意思
- 6Macos 有没有好用的文本编辑器,试下 Notepad--_notepad-- mac
- 7Android动态部署六:如何从插件apk中启动BroadcastReceiver和ContentProvider_android 如何根据contentprovider和instrumentation实现自启动
- 8python中的三元运算符_python中的三元运算怎么写
- 9Android dexclassLoader 热更新个人学习总结_androidstudio 生成dex文件热更新
- 10Docker简单快速入门
基于STM32F4核心板的经典项目——四轴无人机飞控详解:从零开始打造,完整实现垂直起降、定点、轨迹控制,【教程分享】基于STM32F4核心板的四旋翼无人机飞控项目,打造经典程序!(59字)_stm32飞控程序详解
赞
踩
基于STM32F4核心板的经典项目程序,远比网上搜索的开发板例程更有价值,历时2年时间打造。
适合学生学习,工程师提高技术等等。
项目内容为:用stm32f407单片机核心板和gy-91模块做一个功能强大的四旋翼无人机飞控,程序从零开始做起,简洁而不简单。
里面主要包括pid控制器,无迹卡尔曼滤波UKF,IMU+GPS组合导航,上位机通信,遥控器通信和解码,dma传输,手机蓝牙控制等。
实现无人机垂直起降,定点,轨迹控制等。
商品包括原理图方案,单片机程序及固件,上位机程序及运行环境。
ID:69100675374361760
yuchongzhangyuan







基于STM32F4核心板的经典项目程序,是一个非常有价值的项目。历时2年时间的打磨,它比网上搜索到的开发板例程更加全面、深入,适合学生学习和工程师提高技术。
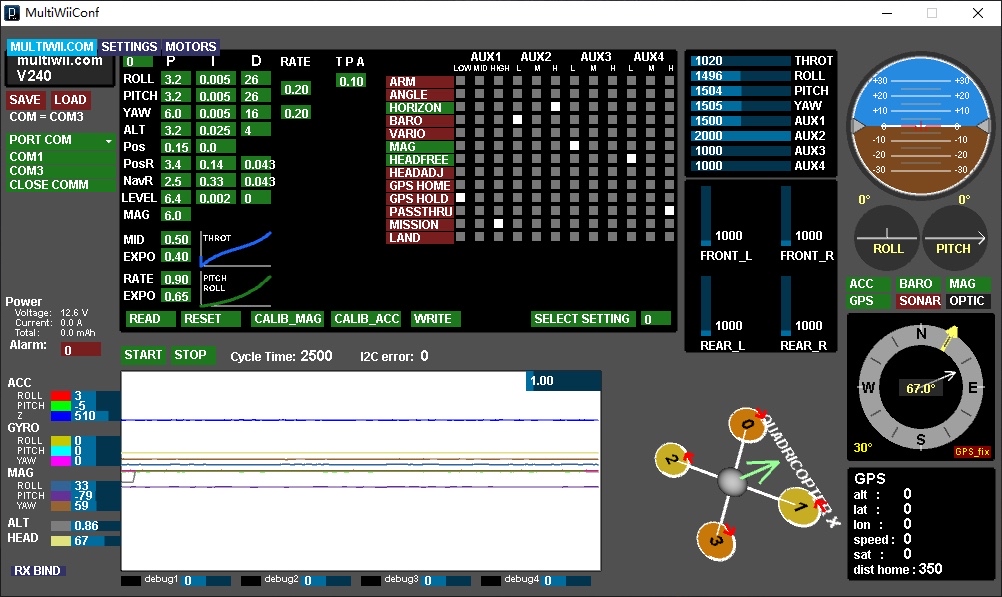
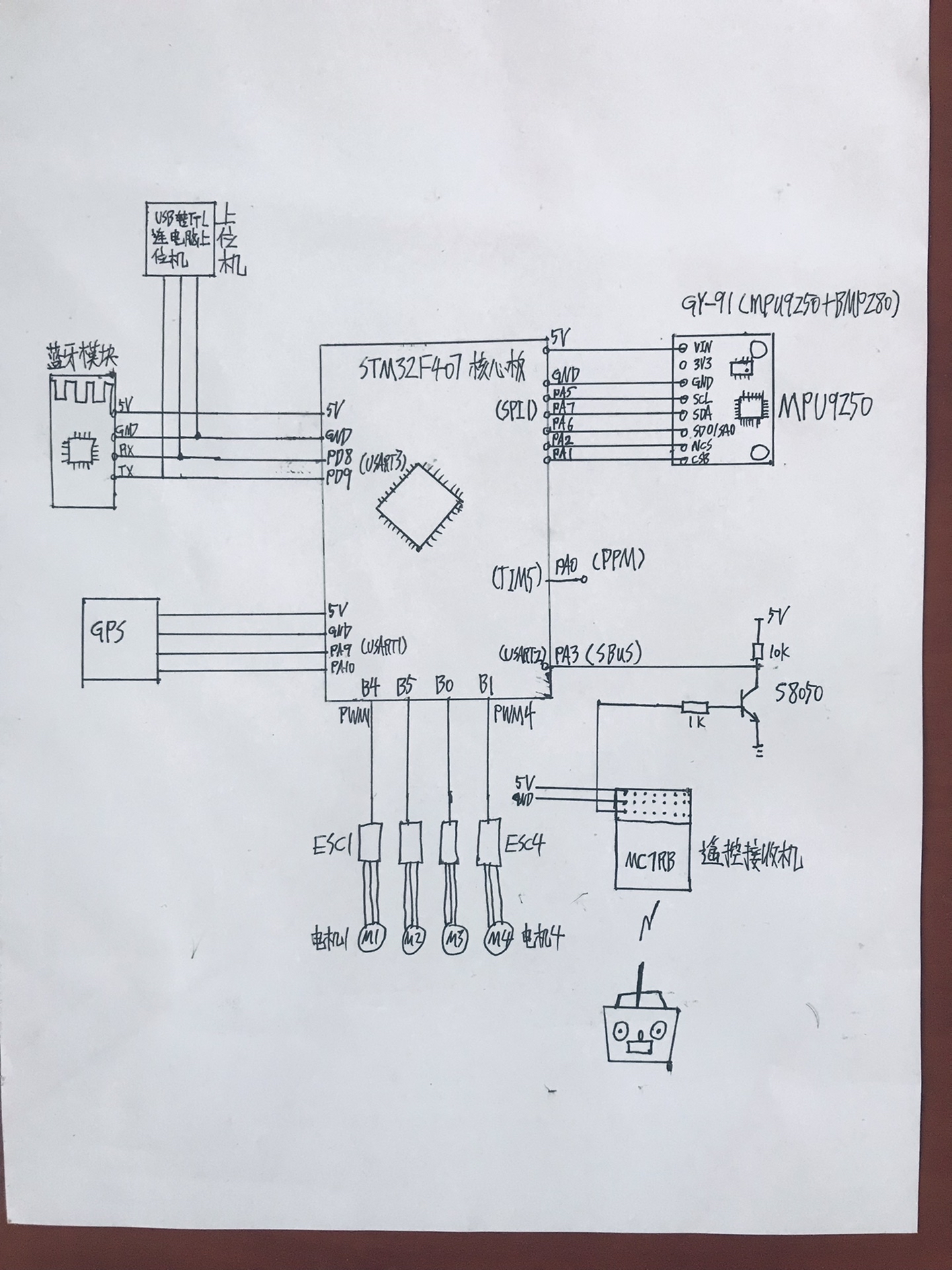
本项目的主要内容是利用STM32F407单片机核心板和GY-91模块构建一个功能强大的四旋翼无人机飞控系统。这个系统的程序是从零开始开发的,简洁但不简单。
在这个项目中,主要包括了以下几个方面的技术:PID控制器、无迹卡尔曼滤波(UKF)、IMU和GPS的组合导航、上位机通信、遥控器通信和解码、DMA传输和手机蓝牙控制等。
首先,我们采用了PID控制器来实现无人机的稳定飞行。PID控制器是一种经典的控制算法,通过不断调整控制参数,使得无人机能够稳定地悬停在空中,并实现定点和轨迹控制。
另外,在无人机的导航方面,我们采用了无迹卡尔曼滤波(UKF)算法。这个算法是一种基于贝叶斯滤波的非线性滤波方法,能够更准确地估计无人机的位置、速度和姿态。
为了实现更加精确的导航,我们还将IMU和GPS信息进行了组合。IMU(惯性测量单元)能够测量无人机的加速度和角速度,而GPS(全球定位系统)可以提供无人机的位置和速度信息。将两者进行融合处理,能够有效地减小姿态估计的误差。
为了方便与上位机进行通信,我们在系统中添加了上位机通信功能。通过串口通信,我们可以实时地将无人机的状态和控制指令传输给上位机,同时也可以接收上位机发送过来的指令。
此外,我们还实现了遥控器通信和解码功能。通过接收遥控器发送的信号并解码,我们可以实现对无人机的远程控制。
在数据传输方面,为了提高系统的运行效率,我们采用了DMA传输技术。DMA(直接内存访问)能够在无需CPU干预的情况下,直接将数据从外设传输到内存或者从内存传输到外设,极大地提高了数据传输的效率。
最后,为了实现无人机的远程控制,我们还添加了手机蓝牙控制功能。通过手机上的蓝牙模块与无人机进行通信,我们可以通过手机上的APP发送控制指令,实现对无人机的遥控。
在本项目中,我们不仅提供了完整的原理图方案,还提供了单片机程序及固件和上位机程序及运行环境。这些资源可以帮助初学者更好地理解无人机飞控系统的原理和实现。
总之,基于STM32F4核心板的四旋翼无人机飞控项目是一个非常有价值的项目。通过学习和研究这个项目,不仅可以提高自身的技术水平,还可以为无人机领域的发展做出贡献。希望这个项目能够对广大学生和工程师有所帮助,激发他们对技术的热情和创造力。
相关的代码,程序地址如下:http://matup.cn/675374361760.html

