
热门标签
热门文章
- 1程序员必知单词、语句、英文缩写汇总_= 操作符 英文简称
- 2量化基础策略二:双均线策略_双均线策略代码
- 3复刻大模型 Sora 有多难?一张图带你读懂 Sora 的技术路径
- 4Thingsboard入门教程:本地环境搭建和源码编译安装,献给thingsboard编译失败的同学,教程不断完善中,文章最后是thingsboard常见编译失败的问题总结
- 5【Hugggingface.co】关于huggingface.co无法访问&大模型下载运行报错解决We couldn‘t connect to ‘https://huggingface.co‘ to.
- 6怎么用SPSS分析三组数据的差异是否显著?_组间差异分析spss
- 7sqllab第十五关通关笔记
- 8IPv6技术(强化版万字文)_cisco ipv6 dhcp
- 9Jetpack Compose 管理状态(一)_outlined text
- 10C#发起http的GET/POST请求并处理响应,及其函数封装_c# http get
当前位置: article > 正文
在Jetson Xavier NX 开发板上使用VScode执行ROS程序详细过程
作者:繁依Fanyi0 | 2024-03-09 06:12:12
赞
踩
在Jetson Xavier NX 开发板上使用VScode执行ROS程序详细过程
1.创建 ROS 工作空间ws
在home下打开终端输入下面指令
mkdir -p xxx_ws/src(必须得有 src)
cd 自己命名_ws
catkin_make
- 1
- 2
- 3
2.启动 vscode
cd 自己命名_ws
code .
- 1
- 2
3.vscode 中编译 ros
快捷键 ctrl + shift + B 调用编译,在上方弹窗位置选择:catkin_make:build
可以点击配置设置为默认,修改.vscode/tasks.json 文件
这里直接复制就行不用改,然后ctrl+c保存。按击ctrl+shift+b若出现下图输出证明配置成功,以后编译直接按快捷键。
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
4.创建 ROS 功能包
选定 src 右击 —> create catkin package
上方出现搜索框一样的栏框,在里面设置包名,如:hello_vscode,点击回车
添加依赖:roscpp rospy std_msgs
5 C++ 实现
在文件栏的 src下创建.cpp 文件,输入
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,""); #保证终端输出有中文时不乱码,或者setlocale(LC_CTYPE, "zh_CN.utf8");
//执行节点初始化
ros::init(argc,argv,"Hello_vscode");
//输出日志
ROS_INFO("Hello VSCode!!!哈哈哈哈哈哈哈哈哈哈");
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
6.配置 CMakeLists.txt
取消下面两处的注释
add_executable(节点名称
src/C++源文件名.cpp
)
target_link_libraries(节点名称
${catkin_LIBRARIES}
)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
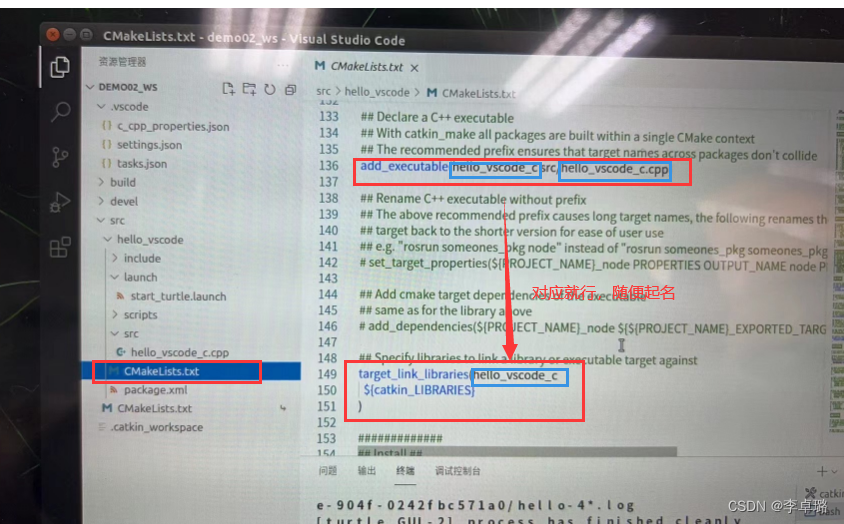
这里注意 CMakeLists.txt文件别找错了,其次一般节点名称和源文件名是一致的当然你改别的也行,但是要保证上下两处的节点名称一致。
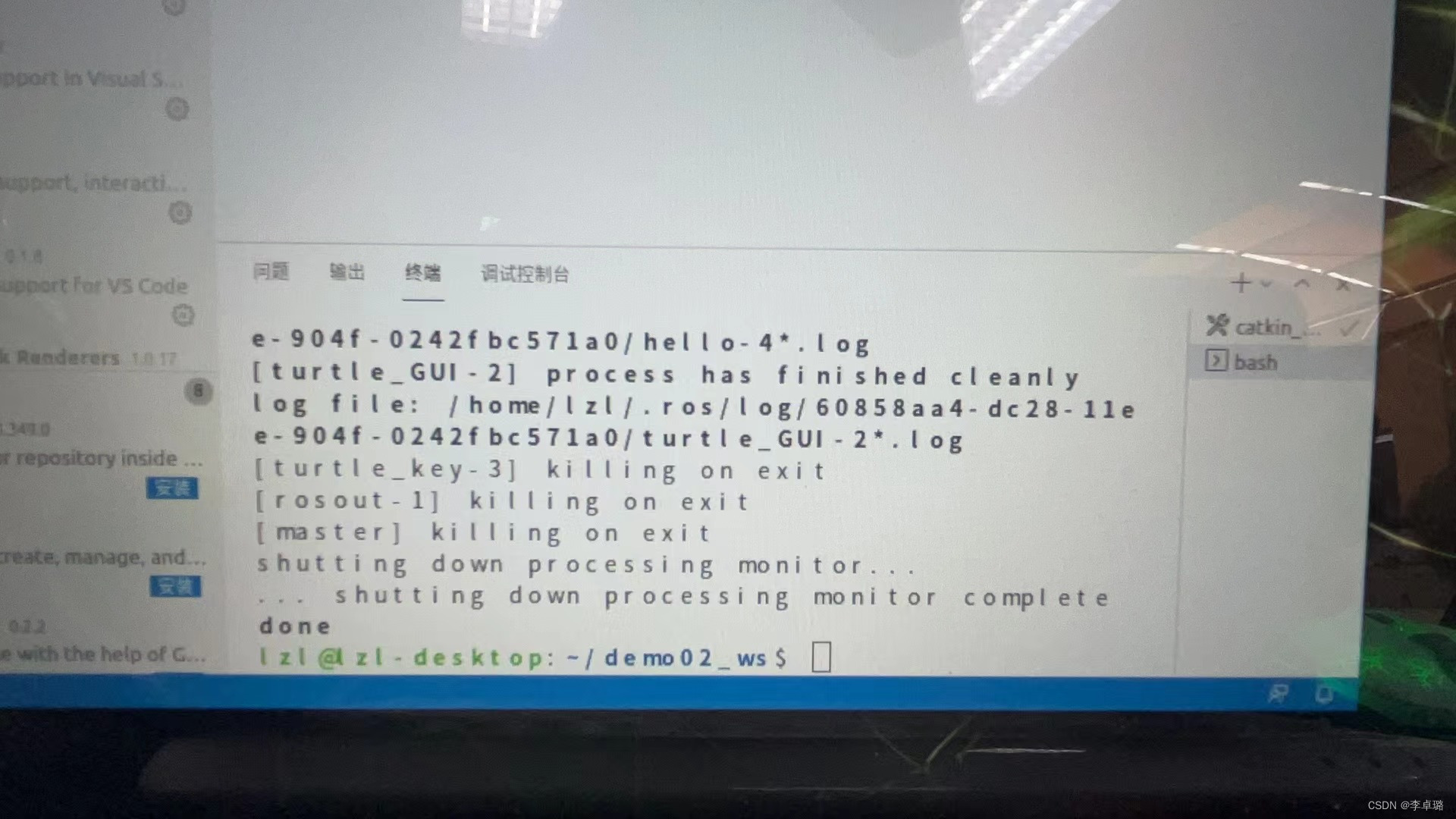
7.编译执行
编译: ctrl + shift + B
点击小加号新建终端输入roscore
再新建终端首先输入source ./devel/setup.bash,再输出rosrun hello_vscode(创建 ROS 功能包时的包名) hello_vscode_c.cpp(在功能包的 src 下新建 cpp 文件名称)
完结!撒花~~~
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/213574
推荐阅读
相关标签

