
- 1数据结构:二叉树的操作
- 2解析 JavaScript 代码的加密与解密过程
- 3vnc连接linux使用教程_用vnc实现windows远程连接linux桌面 vnc安装与配置教程
- 4Linux(ubuntu) 安装kotlin
- 5按键精灵调用python文件_Python&按键精灵自动化
- 6文本分类 -- 追根究底_文本互信息计算
- 7Eclipse中使用Git——快速入门教程_eclipse git
- 8Android Studio使用的那些事(三)AS不同版本安装注意点(最新版AS 3.2.1)_as各个版本
- 9Capture One 21 Pro v14.3.0.185 飞思顶级图像后期处理编辑软件_飞思吃显卡
- 10淘宝扭蛋机小程序:探索未知的惊喜之旅
OpenHarmony 样例——鸿蒙小车开发
赞
踩
摘要:本文简单介绍鸿蒙系统 + Hi3861 的WiFi小车开发
适合群体:适用于润和Hi3861开发板
文中所有代码仓库:https://gitee.com/qidiyun/hihope-3861-smart-home-kit
13.1 小车介绍
基于鸿蒙系统 + Hi3861 的WiFi小车
首先,我们得有一套WiFi小车套件,其实也是Hi3861 加上电机、循迹模块、超声波等模块。
小车安装完大概是这样:

13.2 电机驱动
我们这里先只做最简单的,驱动小车的电机,让小车跑起来。
电机的驱动板如下图,目前电机驱动芯片用的是L9110S芯片。

典型的应用电路如下图:

我们可以看到,如果要控制电机,我们芯片至少需要2路PWM信号,一路用于控制正转,一路用于控制反转。
然后我们小车有两个轮子,需要两个电机,所以我们需要 4 路PWM信号。
查阅小车资料,可以知道,目前Hi3861 芯片用来控制电机的4路PWM分别是:
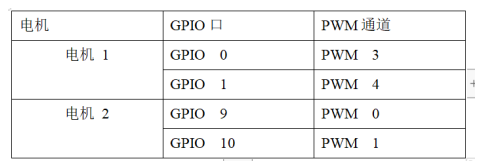
知道了PWM通道和对应的GPIO口,我们就可以开始编程了。
首先PWM初始化部分:
void pwm_init(void) { hi_gpio_init(); //引脚复用 hi_io_set_func(HI_IO_NAME_GPIO_0, HI_IO_FUNC_GPIO_0_PWM3_OUT); hi_io_set_func(HI_IO_NAME_GPIO_1, HI_IO_FUNC_GPIO_1_PWM4_OUT); hi_io_set_func(HI_IO_NAME_GPIO_9, HI_IO_FUNC_GPIO_9_PWM0_OUT); hi_io_set_func(HI_IO_NAME_GPIO_10, HI_IO_FUNC_GPIO_10_PWM1_OUT); //初始化pwm hi_pwm_init(HI_PWM_PORT_PWM3); hi_pwm_init(HI_PWM_PORT_PWM4); hi_pwm_init(HI_PWM_PORT_PWM0); hi_pwm_init(HI_PWM_PORT_PWM1); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
控制小车前进、后退、左转、右转、停止的函数:
//停止 void pwm_stop(void) { //先停止PWM hi_pwm_stop(HI_PWM_PORT_PWM3); hi_pwm_stop(HI_PWM_PORT_PWM4); hi_pwm_stop(HI_PWM_PORT_PWM0); hi_pwm_stop(HI_PWM_PORT_PWM1); } void car_stop(void) { car_info.cur_status = car_info.go_status; printf("pwm_stop \r\n"); pwm_stop(); } //前进 void pwm_forward(void) { //先停止PWM hi_pwm_stop(HI_PWM_PORT_PWM3); hi_pwm_stop(HI_PWM_PORT_PWM4); hi_pwm_stop(HI_PWM_PORT_PWM0); hi_pwm_stop(HI_PWM_PORT_PWM1); //启动A路PWM hi_pwm_start(HI_PWM_PORT_PWM3, 750, 1500); hi_pwm_start(HI_PWM_PORT_PWM0, 750, 1500); } void car_forward(void) { if(car_info.go_status != CAR_STATUS_FORWARD) { //直接退出 return ; } if(car_info.cur_status == car_info.go_status) { //状态没有变化,直接推出 return; } car_info.cur_status = car_info.go_status; printf("pwm_forward \r\n"); pwm_forward(); step_count_update(); } //后退 void pwm_backward(void) { //先停止PWM hi_pwm_stop(HI_PWM_PORT_PWM3); hi_pwm_stop(HI_PWM_PORT_PWM4); hi_pwm_stop(HI_PWM_PORT_PWM0); hi_pwm_stop(HI_PWM_PORT_PWM1); //启动A路PWM hi_pwm_start(HI_PWM_PORT_PWM4, 750, 1500); hi_pwm_start(HI_PWM_PORT_PWM1, 750, 1500); } void car_backward(void) { if(car_info.go_status != CAR_STATUS_BACKWARD) { //直接退出 return ; } if(car_info.cur_status == car_info.go_status) { //状态没有变化,直接推出 return; } car_info.cur_status = car_info.go_status; printf("pwm_backward \r\n"); pwm_backward(); step_count_update(); } //左转 void pwm_left(void) { //先停止PWM hi_pwm_stop(HI_PWM_PORT_PWM3); hi_pwm_stop(HI_PWM_PORT_PWM4); hi_pwm_stop(HI_PWM_PORT_PWM0); hi_pwm_stop(HI_PWM_PORT_PWM1); //启动A路PWM hi_pwm_start(HI_PWM_PORT_PWM3, 750, 1500); } void car_left(void) { if(car_info.go_status != CAR_STATUS_LEFT) { //直接退出 return ; } if(car_info.cur_status == car_info.go_status) { //状态没有变化,直接推出 return; } car_info.cur_status = car_info.go_status; printf("pwm_left \r\n"); pwm_left(); step_count_update(); } //右转 void pwm_right(void) { //先停止PWM hi_pwm_stop(HI_PWM_PORT_PWM3); hi_pwm_stop(HI_PWM_PORT_PWM4); hi_pwm_stop(HI_PWM_PORT_PWM0); hi_pwm_stop(HI_PWM_PORT_PWM1); //启动A路PWM hi_pwm_start(HI_PWM_PORT_PWM0, 750, 1500); } void car_right(void) { if(car_info.go_status != CAR_STATUS_RIGHT) { //直接退出 return ; } if(car_info.cur_status == car_info.go_status) { //状态没有变化,直接推出 return; } car_info.cur_status = car_info.go_status; printf("pwm_right \r\n"); pwm_right(); step_count_update(); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
最后,要使用pwm功能,我们需要修改
device/soc/hisilicon/hi3861v100/sdk_liteos/build/config/usr_config.mk
增加这两行,这里是打开PWM功能
CONFIG_PWM_SUPPORT=y
CONFIG_PWM_HOLD_AFTER_REBOOT=y
- 1
- 2
- 3

13.3 WiFi控制部分
我们在小车上面简单编写一个UDP程序,监听50001端口号。这里使用的通信格式是json,小车收到UDP数据后,解析json,并根据命令执行相应的操作,例如前进、后退、左转、右转等,代码如下:

电脑端,使用C#编写一个测试程序,可以手动输入小车的IP地址,也可以不输入IP地址,这样,电脑端程序会发送广播包给小车,也可以起到控制的功能。

13.4 WiFi热点连接
注意,我这里WiFi小车固件默认连接热点的ssid是:

读者需要自己修改成自己的热点。
文件:sta_entry.c
小车的源码,C#控制端的代码均开源,大家可以自由修改,发挥自己的想象,创造出更厉害炫酷的DIY产品。

