
- 12022-03-30 VsCode中使用clangd插件的各种设置_clangd arguments
- 2TensorFlow(1)——数据读取的三种方式_数据步中对应的读取模式有
- 3App.Config详解及读写操作
- 4VsCode免密登录
- 5STM32--ESP8266物联网WIFI模块(贝壳物联)--温湿度数据上传服务器显示_bigiotstm32-master\bigiot\project\stm32f10x_led\md
- 6时序数据库介绍和使用
- 7C++ 疑难点
- 8K8S 证书过期的解决方法_stopped kubelet: the kubernetes node agent.
- 9复杂大脑网络的结构和功能_脑机数据和复杂脑网络可视化技术
- 10安卓常见shell命令_安卓 dns设置shell命令
毕业/课程设计——基于STM32的智能灯光控制系统(物联网、智能家居、手机APP控制、语音控制)_基于语音控制的led照明系统的研发
赞
踩
文章首先介绍本系统所包含的功能,主要包含六方面功能,之后逐步分享开发过程,其流程如下:点亮灯带(三极管)→调节灯光亮度(PWM)→为系统添加远程控制功能→为系统添加语音识别功能→添加超声波姿态监测功能→添加OLED显示功能
特别主要:本文不是将所有程序罗列在一起,而是按照上放所说的流程进行,添加一个功能,展示一下该功能的程序,这种方式对学习者非常有利,观看完本文肯定能明白类似的智能家居系统如何开发!!!!
演示视频:
基于stm32的智能灯光系统(智能家具、远程控制、语音控制)
一、功能介绍
1、远程控制灯光:手机端app远程控制灯光开关(手机app自主开发)
手机端通过触发相应的组件,将相应的控制命令上传至云平台,esp-01s通过wifi信号连接该云平台获取到该指令,由stm32控制灯光亮灭、暖光与冷光切换、一档、二档、三档调节。
2、语音控制功能:通过语音控制灯光
采用高识别率离线语音识别模块,识别使用者的语音命令,通过说话的方式控制灯光亮灭、暖光与冷光切换、一档、二档、三档调节。
3、远程显示功能:环境温度、湿度在手机端显示
系统具备dht11测温传感器,单片机驱动这个传感器工作,并将相应的数据通过esp-01s 、云平台,上传至手机app显示。
4、坐姿异常监测显示:超声波传感器测距身体的距离
使用本系统制作台灯时,可添加该功能,监测坐姿是否规范,若距离过近,蜂鸣器报警,并在OLED屏幕上显示。
5、系统当前状态显示:灯光是否开启、挡位显示、坐姿是否异常等在OLED屏显示
将当前时刻系统的工作状态显示在OLED屏幕上,包括灯光是否打开、挡位、坐姿是否异常,当以上状态发生变化时,OLED及时更改显示(既OLED始终显示最新的状态)。
6、RTC实时时钟:OLED显示实时时钟,且支持按键离线修改
本项目利用核心板上的RTC时钟晶振,开发实时时钟,在时间显示界面可以观察到具体时间,且本项目支持“通过按键修改时间”。K1:进入时间设置界面、切换所修改的时间单位、返回时间显示界面,K2:时间加一个单位,K3:时间减一个单位
在时间显示界面触发K1按键,进入时间设置界面;之后触发K1按键设置不同的时间单位,刚进入时间设置界面时是对年份进行修改,再按一下K1对月份进行修改,如此递推(oled屏幕上有个小箭头,小箭头所指的就是当前正在修改的时间单位),当最后在按下一次K1时,返回时间显示界面,并进行时间更新。
二、详细阐述开发流程
2.1、先让灯亮起来
正如章节3中所说,灯带是通过三极管(NPN)驱动的,单片机的IO口连接三极管基极,可以将其看成控制信号,当该引脚输出高电平时,可以认为三极管导通,电流由集电极所连的VCC提供,也就是用电源给灯带供电,这个电流远大于IO口直接输出的电流,足以满足灯带的需求。
2.2、调节灯光亮度
刚刚已经介绍过如何使用三极管点亮灯带。那么又该如何控制灯的亮度哪?也就是如何控制电流呢?这就需要常说的PWM输出了,可以将三极管看成一个“水龙头”,PWM可以理解为我们拧水龙头的力气,通过调节不同的占空比,使得三极管“打开不同的口子”,控制逻辑如下:
①PWM占空比大→“打开的口子大”→输出的电流大→灯带更亮
②PWM占空比小→“打开的口子小”→输出的电流小→灯带更暗
在程序中首先将IO口配置为PWM输出,本设计选用的定时器4的通道3与通道4产生PWM(两个灯,一个冷光一个暖光,需要两路PWM输出)具体程序如下:
- void Motor_PWM_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
-
- /*****输出TIM4_CH3和TIM4_CH4和的PWM脉冲波形*****/
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9; //TIM_CH3和TIM_CH4
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
-
- /********************初始化TIM3*******************/
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- /*******初始化TIM4 Channel3、TIM4 Channel4 PWM模式********/
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高
- TIM_OC3Init(TIM4, &TIM_OCInitStructure); //初始化外设TIM4 OC3
- TIM_OC4Init(TIM4, &TIM_OCInitStructure); //初始化外设TIM4 OC4
-
- /*******使能预装载寄存器********/
- TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);
- TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable);
- TIM_Cmd(TIM4, ENABLE); //使能TIM4
-
- }

如此PWM的输出就已经配置好了,下面就在主循环中调用修改PWM占空比函数即可,具体程序如下,该程序修改了三个不同的占空比,以对应灯光的一档、二档、三档。
- /********两端都使能 1档**********/
- TIM_SetCompare3(TIM4,5000);
- TIM_SetCompare4(TIM4,5000);
-
- /********两端都使能 2档**********/
- TIM_SetCompare3(TIM4,10000);
- TIM_SetCompare4(TIM4,10000);
-
- /********两端都使能 3档**********/
- TIM_SetCompare3(TIM4,20000);
- TIM_SetCompare4(TIM4,20000);
-
4.3、远程控制功能
正如上文所说,远程控制功能实现的原理是,手机app连接云平台,手机APP相应按键触发时,将相应的控制指令上传至云平台,esp-01s通过周围的WiFi信号连接云平台,获取云平台上的数据,并通过串口将该数据传输给STM32单片机,单片机解析数据并完成相应的驱动。接下来逐步进行开发,分为手机端app的制作,手机连接云平台、设备连接云平台。
4.3.1手机端app的制作:
本项目使用一款麻省理工研发的开发安卓app的平台——appinventor,该平台基于图形化编程,是“不愿意编程党”的福音,不需要使用代码开发app,使用一些逻辑关系模块完成开发。首先在主页面拖放好各种想要的按键,之后在编程界面拖放逻辑关系模块,完成开发(与labview相似)。
4.3.2手机端连接云平台:
在使用appinventor开发的过程中,调用连接云平台接口,连接云平台,博主使用的是巴法云平台,在巴法云官网有详细的教程。打开巴法云官网,其界面如图8所示,点击图片中所圈的地方“实例指南”进入巴法云论坛,之后在论坛中找到“APP inventor编写安卓app控制ESP8266”这篇文章,如图9所示,里面有详细的制作过程。

图8 巴法云界面

图9 论坛内容
需要注意的是连接云平台的接口,ClientSocketAI2Ext,这个不是appinventor的原生组件,需要再Extension下导自行导入插件。
4.3.3设备(单片机)连接云平台
esp-01s也是一个MCU,通过编程开发,本设计通过arduino平台开发相关的功能,值得注意的是esp-01s通过WiFi信号连接云平台,所以环境中必须要有WiFi,由于此处程序过多,仅展示重要的地方。
①云平台定义及主题相关定义,具体程序如下:
- #include <ESP8266WiFi.h>
- #include<SimpleDHT.h>
-
- //巴法云服务器地址
- #define TCP_SERVER_ADDR "bemfa.com"
- //服务器端口,tcp创客云端口8344
- #define TCP_SERVER_PORT "8344"
-
- //********************需要修改的部分*******************//
- #define DEFAULT_STASSID "HUAWEI P30 Pro+" //WIFI名称,区分大小写,不要写错
- #define DEFAULT_STAPSW "18253858772" //WIFI密码
- String UID = "23f9a5f2d3584dc8516409db14b4827c"; //用户私钥,可在控制台获取,修改为自己的UID
- String TOPIC1 ="TD00light"; //主题名字,可在控制台新建
- String TOPIC2 = "TD00temp"; //用户私钥,可在控制台获取,修改为自己的UID
- const int LED_Pin = 0; //单片机LED引脚值,GPIO0引脚
- int pinDHT11 = 2;
- //**************************************************//
②接下来是连接服务器,向服务器发送指令cmd=1&uid="+UID+"&topic="+TOPIC1+"\r\n,其中的UID与TOPIC1就是上方程序中的相关定义。
具体程序如下:
- void startTCPClient()
- {
- if(TCPclient.connect(TCP_SERVER_ADDR,atoi(TCP_SERVER_PORT)))
- {
- Serial.print("\nConnected to server:");
- Serial.printf("%s:%d\r\n",TCP_SERVER_ADDR,atoi(TCP_SERVER_POR T));
- String tcpTemp=""; //初始化字符串
- tcpTemp = "cmd=1&uid="+UID+"&topic="+TOPIC1+"\r\n"; //构建订阅指令
- sendtoTCPServer(tcpTemp); //发送订阅指令
- tcpTemp="";//清空
- preTCPConnected = true;
- preHeartTick = millis();
- TCPclient.setNoDelay(true);
- }
- Else
- {
- Serial.print("Failed connected to server:");
- Serial.println(TCP_SERVER_ADDR);
- TCPclient.stop();
- preTCPConnected = false;
- }
- preTCPStartTick = millis();
- }
③获取云平台传来的数据,并通过串口传输给STM32,具体程序如下:
- if (TCPclient.available()) //若有数据传来
- {
- char c =TCPclient.read();
- TcpClient_Buff +=c; //数据存储
- TcpClient_BuffIndex++;
- TcpClient_preTick = millis();
- if(TcpClient_BuffIndex>=MAX_PACKETSIZE - 1)
- {
- TcpClient_BuffIndex = MAX_PACKETSIZE-2;
- TcpClient_preTick = TcpClient_preTick - 200;
- }
- preHeartTick = millis();
- }
- if((TcpClient_Buff.length() >= 1) && (millis() - TcpClient_preTick>=200))
- {
- TCPclient.flush();
- Serial.println(TcpClient_Buff); //串口传输
- if((TcpClient_Buff.indexOf("&msg=11") > 0))
- {
- turnOnLed();
- }else if((TcpClient_Buff.indexOf("&msg=10") > 0))
- {
- turnOffLed();
- }
- TcpClient_Buff="";
- TcpClient_BuffIndex = 0;
- }
如此就可以将云平台中的控制指令传输给STM32,STM32进行解析并完成相应的控制,由于本设计还添加了语音识别功能,所以相关控制的实现等讲解完语音识别后在进行讲解。
4.4语音识别功能
语音识别功能主要采用了SU-03T离线语音识别模块,这个模块不需要编程,使用厂家提供的云平台(智能公元)开发,正如前文所说本设计主要用了该模块的串口功能,该模块的串口与STM32单片机的另一个串口连接,当识别到相应的语音时,串口输出相应的控制指令给STM32。在此只展示打开灯光、关闭灯光、打开冷光、打开暖光对应的指令,分别为0x11、0x10、0x21、0x22,相关配置如图10所示。
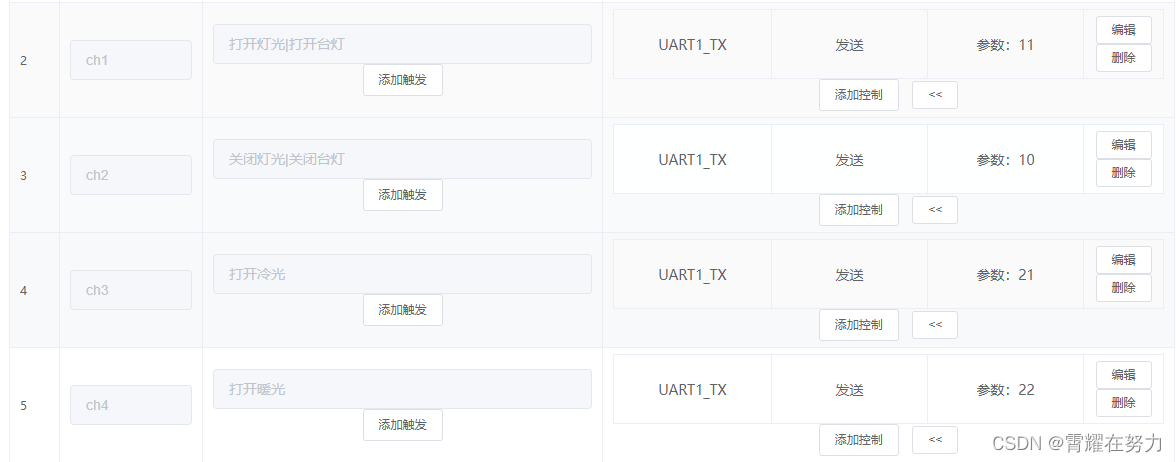
图10 su-03t平台配置
4.5、STM32解析指令并完成相关驱动
正如前文所说,WiFi模块与su-03t都是使用串口与STM32单片机建立联系的,所以我们首先需要完成串口的相关配置,在此以WiFi模块对应的usart3为例,配置串口。
具体程序如下:
- void usart3_init(u32 bound)
- {
- NVIC_InitTypeDef NVIC_InitStructure;
- GPIO_InitTypeDef GPIO_InitStructure;
- USART_InitTypeDef USART_InitStructure;
-
- /***********使能时钟************/
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);
- USART_DeInit(USART3); //复位串口3
-
- /*******配置输出引脚*******/
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB10
-
- /*******配置输入引脚*******/
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
- GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB11
-
- /********串口相关配置********/
- USART_InitStructure.USART_BaudRate = bound;//波特率一般设置为9600;
- USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
- USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
- USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFl
- owControl_None;//无硬件数据流控制
- USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
- USART_Init(USART3, &USART_InitStructure); //初始化串口3
-
- USART_Cmd(USART3, ENABLE); //使能串口
- USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断
-
- /*******设置中断优先级********/
- NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
- NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
-
- TIM3_Int_Init(1000-1,7200-1); //10ms中断
- USART3_RX_STA=0; //清零
- TIM_Cmd(TIM3,DISABLE); //关闭定时器7
- }
至此WiFi模块对应的串口就配置完成,su-0t对应的串口配置与该串口相似,WiFi模块传输来的数据是需要解析的,而su-03t直接传输的十六进制,不需要解析,所以接下来就是解析WiFi模块通过串口传来的数据。
具体程序如下:
- if(USART3_RX_STA&0X8000) //接收到一次数据了
- {
- rlen=USART3_RX_STA&0X7FFF; //得到本次接收到的数据长度
- USART3_RX_BUF[rlen]=0; //添加结束符
-
- //数据提取
- if(strncmp(USART3_RX_BUF,"cmd=2",5)==0)
- {
- for(i=0;i<strlen(USART3_RX_BUF)+1;i++)
- {
- data_tiqu[s]=USART3_RX_BUF[i];
- s++;
- }
- printf("%s",data_tiqu);
- for(i=0;i<strlen(data_tiqu);i++)
- {
- if(data_tiqu[i]==cmd[0])
- {
- k=i;
- k++;
- for(j=1;j<strlen(cmd);j++)
- {
- if(data_tiqu[k]==cmd[j])
- {
- k++;
- flag=1;
- }
- else
- {
- flag=0;
- }
- }
- }
- }
- s=0;
- //数据提取结束
- printf("\r\n\r\n");
- if(flag==1)
- {
- for(i=k+1;i<strlen(data_tiqu)+1;i++) //此时 i为传输接受数据的索引
- {
- data[s]=data_tiqu[i];
- s++;
- }
- printf("%s",data);
- printf("zaici"); //作用:程序定位
- printf("\r\n");
- }
- }
- if(strncmp(USART3_RX_BUF,"cmd=0&res=1",11)==0)
- {
- printf("%s",USART3_RX_BUF);
- }
- USART3_RX_STA=0;
- }
解析好的数据就存放在data这个数组中,接下来就在主循环中判断data数组中存放的数据以及su-03t通过串口直接传来的十六进制指令即可,根据相应的指令完成相关外设的驱动。
具体程序如下。
- /******************驱动控制**************************/
- //判断APP控制开关灯
- if((data[0]=='1'&&data[1]=='1') || (temp == 0x11))
- {
- cold_light_flag = 1;
- warmth_light_flag = 0;
- TIM_SetCompare3(TIM4,5000); //初始时冷光亮
- TIM_SetCompare4(TIM4,0);
-
- temp=0;
- state_flag_temp=11;
- state_flag[0]=1; //冷亮
- state_flag[2]=1; //一档
-
- display_on[5] = 24; //已为您打开灯(oled显示的汉字在数组中的索引)
- display_on[6] = 0; //已为您打开灯(oled显示的汉字在数组中的索引)
- }
- if((data[0]=='1'&&data[1]=='0') || (temp == 0x10))
- {
- cold_light_flag = 0;
- warmth_light_flag = 0;
- temp=0;
- state_flag_temp=10;
- state_flag[0]=0;
- state_flag[1]=0;
- state_flag[2]=0;
- display_off[5] = 24;
- display_off[6] = 0;
- }
- //判断APP控制冷暖光调节
- if(((data[0]=='2'&&data[1]=='1') || (temp == 0x21)) && (cold_light_flag == 0)) //冷亮暖灭
- {
- cold_light_flag = 1;
- warmth_light_flag = 0;
- TIM_SetCompare3(TIM4,5000);
- TIM_SetCompare4(TIM4,0);
-
- temp=0;
- state_flag_temp=21;
- state_flag[0]=1; //冷亮
- state_flag[1]=0; //暖灭
-
- display_on[5] = 26;
- display_on[6] = 25;
- }
- if(((data[0]=='2'&&data[1]=='2') || (temp == 0x22)) && (warmth_light_flag == 0)) //冷灭暖亮
- {
- cold_light_flag = 0;
- warmth_light_flag = 1;
- TIM_SetCompare3(TIM4,0); /
- TIM_SetCompare4(TIM4,5000);
-
- temp=0;
- state_flag_temp=22;
- state_flag[0]=0; //冷灭
- state_flag[1]=1; //暖亮
- display_on[5] = 27;
- display_on[6] = 25;
- }
- //调节灯光的1、2、3档位
- if((data[0]=='3'&&data[1]=='1')|| (temp == 0x31)) //1档
- {
- if(warmth_light_flag == 1) //调节暖光
- {
- TIM_SetCompare3(TIM4,0);
- TIM_SetCompare4(TIM4,5000);
- }
- else if(cold_light_flag == 1) //调节冷光
- {
- TIM_SetCompare3(TIM4,5000);
- TIM_SetCompare4(TIM4,0);
- }
- temp=0;
- state_flag_temp=31;
- state_flag[2]=1; //一档
- display_now[5] = 37;
- }
- if((data[0]=='3'&&data[1]=='2')|| (temp == 0x32)) //2档
- {
- if(warmth_light_flag == 1)
- {
- TIM_SetCompare3(TIM4,0);
- TIM_SetCompare4(TIM4,10000);
- }
- else if(cold_light_flag == 1)
- {
- TIM_SetCompare3(TIM4,10000);
- TIM_SetCompare4(TIM4,0);
- }
- temp=0;
- state_flag_temp=32;
- state_flag[2]=2; //二档
- display_now[5] = 38;
-
- }
- if((data[0]=='3'&&data[1]=='3')|| (temp == 0x33)) //3档
- {
- if(warmth_light_flag == 1)
- {
- TIM_SetCompare3(TIM4,0);
- TIM_SetCompare4(TIM4,20000);
- }
- else if(cold_light_flag == 1)
- {
- TIM_SetCompare3(TIM4,20000);
- TIM_SetCompare4(TIM4,0);
- }
- temp=0;
- state_flag_temp=33;
- state_flag[2]=3; //三档
- display_now[5] = 39;
-
- }
至此台灯的控制功能已经全部开发完毕,已经实现了APP远程控制、语音控制功能。
4.6、超声波识别坐姿
超声波模块使用的事HC-SR04,该模块主要是用于把该系统做成台灯时使用,用于检测坐姿规范的,若是开发家里的照明灯,可不加该模块。该模块实现测距的主要原理是:发射装置发射超声波,同时打开定时器,超声波遇到障碍物反弹,被接收装置接受,此时获取定时器的时间,然后根据速度计算距离。其坐姿判断逻辑如下:
HC-SR04测距低于阈值→坐姿不对,距离桌面过近→蜂鸣器报警
HC-SR04测距高于阈值→坐姿正确,距离桌面适宜→蜂鸣器正常
具体程序见如下:
- float Hcsr04GetLength(void )
- {
- u32 t = 0;
- int i = 0;
- float lengthTemp = 0;
- float sum = 0;
- while(i!=5)
- {
- TRIG_Send = 1; //发送口高电平输出
- Delay_Us(20);
- TRIG_Send = 0;
- while(ECHO_Reci == 0); //等待接收口高电平输出
- OpenTimerForHc(); //打开定时器
- i = i + 1;
- while(ECHO_Reci == 1);
- CloseTimerForHc(); //关闭定时器
- t = GetEchoTimer(); //获取时间,分辨率为1US
- lengthTemp = ((float)t/58.0);//cm
- sum = lengthTemp + sum ;
- }
- lengthTemp = sum/5.0;
- return lengthTemp;
- }
- Hcsr_num++;
- if(Hcsr_num == 5)
- {
- Hcsr_num = 0;
- length_C = Hcsr04GetLength(); //测距离
- printf("距离为:%.3f\r\n",length_C);
- if(length_C < 20)
- {
- state_flag[3] =1;
- BEEP =~ BEEP;
- delay_ms(300);
- }
- else
- {
- state_flag[3] =0;
- BEEP = 0;
- }
- if(Hcsr_flag != state_flag[3])
- {
- Hcsr_flag = state_flag[3];
- display_all_flag=1;
- }
- }
5.6、OLED屏显示状态
本文第二章也介绍了一个OLED模块,以及展示了相关显示图片,这部分实现的原理是,在上方介绍相关控制功能时会更改相应的标志位,然后在主程序中检查该标志位的状态,当标志位发生改变时,修改OLED屏幕的显示。
具体程序如下。
- switch(Dis_mode)
- {
- case 0: //在显示控制状态界面
- switch(state_flag_temp) //定时显示界面
- {
- case 11:control_part_display(2,6,display_1,display_on);break; //显示“以为您打开灯”
- case 10:control_part_display(2,6,display_1,display_off);break; //显示“以为您关闭灯”
- case 21:control_part_display(1,7,display_1,display_on);break; //显示“以为您打开冷灯”
- case 22:control_part_display(1,7,display_1,display_on);break; //显示“以为您打开暖灯”
- case 31:control_part_display(1,7,display_1,display_now);break; //显示 “当前亮度为一档”
- case 32:control_part_display(1,7,display_1,display_now);break; //显示“当前亮度为二档”
- case 33:control_part_display(1,7,display_1,display_now);break; //显示“当前亮度为三档”
- }
- data[0]='0'; //清空控制指令
- data[1]='0';
- state_flag_temp=0;
- if(display_all_flag) //状态整体显示界面
- {
- display_all_flag=0;
- control_all_display(state_flag);
- TIM_Cmd(TIM2,DISABLE); //关闭TIM2定时器
- }
- break;
-
- case 1: //在始终显示界面
- RTC_Display(); //显示时钟
- break;
至此,智能灯光系统的相关功能已全部开发完毕,电路板接上电源后系统开始工作,可使用APP控制、语音控制两种方式,实现灯光的开关、一档二档三档的的调节、冷暖光的调节、以及姿势纠正等功能。
感觉未分享清楚、有疑惑
有咨询问题、了解具体内容、需要帮助者 可私信联系
欢迎大家指正交流,有空可以一起讨论代码啊。
制作不易,感谢大家支持,感谢!!!!!!
--------------一个正在努力的人

