
- 1node.js毕业设计教室预约管理小程序(源码+程序+LW+部署)_教室预约系统管理员流程图
- 2##以太网与VLAN配置_以太网组建与vlan配置
- 3大模型系列:OpenAI使用技巧_如何使用tiktoken计算标记数_openai提供了一个名为tiktoken的python库,怎么调用
- 4实践教程|使用Stable Diffusion图像修复来生成自己的目标检测数据集
- 5基于STM32HAL库的ADC采样滤波程序_stm32f4 hal库 adc
- 6AI识别(Springboot+AI)一_spring ai
- 7GCN学习 DROPEDGE: TOWARDS DEEP GRAPH CONVOLUTIONAL NETWORKS ON NODE CLASSIFICATION
- 8YOLOV8解读及推理代码_yolov5改进成yolov8 推理
- 9Entity Framework Core系列教程-1_entityconfigl里面 map
- 10编程语言发展简史_编程语言的发展历史
机器人介绍、应用、前景_极智嘉行为树
赞
踩
1 介绍
1.1 定义
能自动执行任务的人造机器设备一般称为机器人。如工业机械臂,AGV,扫地机器人,服务机器人,机器狗,人形机器人等。
“机器人”(自动控制机器)源自捷克语的Robot一词,而捷克语的Robot一词最早出现在公元1920年捷克科幻作家恰配克的《罗索姆的万能机器人》中[6],原文作“Robota”,后来成为西文中通行的“Robot”。中文将robot译为“机器人”。
1.2 作用
- 取代人类工作,如做一些重复性工作(太脏太累、太危险、太精细、太粗重或太反复无聊的工作)
- 协助人类工作,如做寻找仓库中货物(机器人负责把货物从仓库中找到送到人面前)
1.3 发展历程
- 1947年,核能技术的研究要求某些操作机械代替人处理放射性物质,在这一需求背景下,美国开发了遥控机械臂;
- 1948年,美国开发了机械式的主从机械臂。机械手首先是从美国开始研制的。
- 1954年,美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。
- 1969年日本早稻田大学加藤一郎实验室研发出第一台以双脚走路的机器人。加藤一郎长期致力于研究仿人机器人,被誉为“仿人机器人之父”。
- 1992年从麻省理工学院分离出来的波士顿动力公司(已被谷歌收至麾下)相继研发出能够直立行走的军事机器人Atlas以及四足全地形机器人“大狗”、“机器猫”等,令人叹为观止。
- 2013 年 4 月,举办的汉诺威工业博览会(HANNOVER MESSE) 上, 德国联邦政府正式提出了“工业 4.0” 战略;促进机器人发展;
- 2015 年 5 月,中国于正式发布《中国制造2025》 计划,其中机械臂成为其中重要的细分技术攻坚领域。大量协作机器人,移动机器人公司随后成立。中国机器人进入发展快车道。随着政策发力,国内的产业链开始追赶补齐;人才涌入,人才数量增加,质量提升。
- 2020左右,机械臂的控制系统,减速器,伺服系统,开始发力。
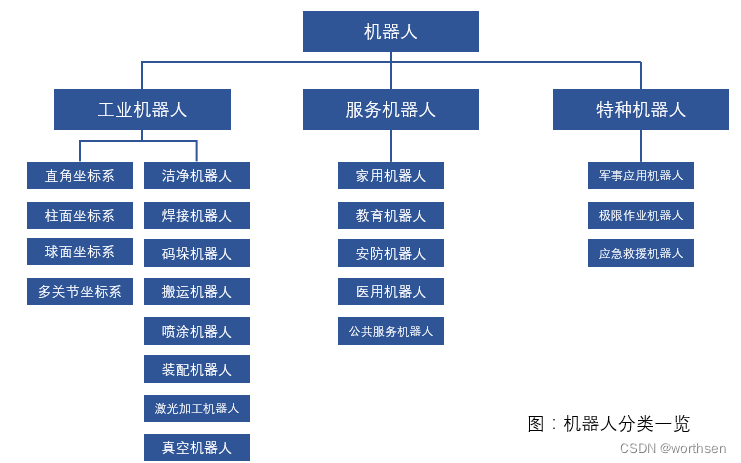
1.4 分类
我国分类:
1.5 三大顾虑
- 自主及道德问题
目前各行业机器人专业功能越来越多,越来越智能(如扫地机器人),但是类人机器人对齐人类,要全能力提升并智能,特别有挑战,涉及很多学科,目前差很多。 - 用于战争问题
战争是残酷的,一切武器都会威胁生命,高科技本身是中性的,只要是高科技都可能被用于战争。 - 失业问题
机器人代替工人,确实会导致失业。社会成产力的高度发展,必然会出现机器替人现象。工厂环境差(导致癌症等),工作压抑,年轻人拒绝进厂,再加上工厂利润薄,人工贵,机器人代替越来越多。产业升级,让更多的工程师就业,从而拉动服务行业规模和工资,让更多的人进入服务行业,这是目前的一个选择。
1.6 前景
2022年世界机器人大会举办期间,中国电子学会发布《2022年中国机器人产业发展报告》(下称《报告》)称,2022年,全球机器人市场规模将达到513亿美元(3000亿人民币),中国机器人市场规模将达到174亿美元(约合1191亿元人民币),增速为22%,首次超过千亿元大关。
2 种类
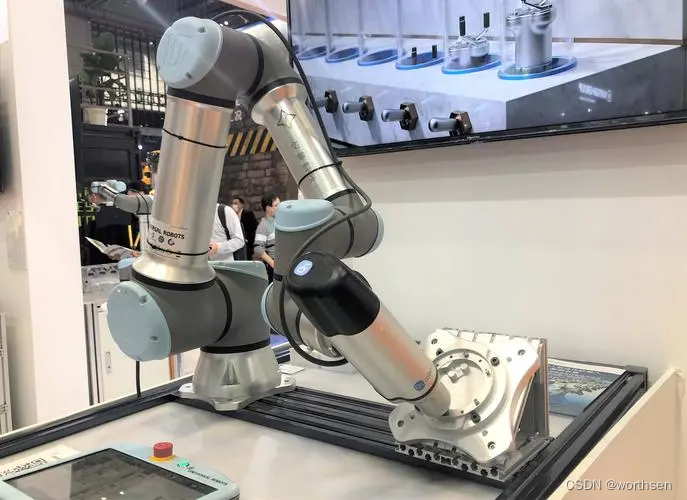
工业机器臂
焊接,搬运物品,打螺丝等。

1956年 日本发那科
1898年 德国库卡 美的收购
1988年 瑞士ABB
1915年 日本安川
2007年 中国埃夫特
2003年 中国汇川
目前主要的机械臂制造企业有:
日本的YAMAHA、安川、发那科、那智不二越、Denso ,
德国的KUKA,瑞士的ABB,意大利的Comau、丹麦的UR,
中国的沈阳新松机器人、 安徽埃夫特、 广州数控、遨博智能。
协作机械臂
- 丹麦优傲
- 中国节卡

2005年 丹麦优傲
2015年 中国遨博
2015年 中国越疆
2014年 中国节卡
工业移动机器人
- 美国 kiva

- 美国 adept

- 中国海康

- 中国极智嘉

- 中国旷视

1997年 美国adept
2002年 美国kiva(亚马逊12年收购)
2000年 中国新松
2016年 中国海康机器人
2015年 中国极智嘉
复合机器人

扫地机器人
- 美国iRobot

- 中国科沃斯

- 中国石头科技

- 中国追觅

1990年 美国iRobot
1998年 中国科沃斯
2014年 中国石头科技
2017年 中国追觅科技
服务机器人
- 商场机器人

- 送餐机器人

- 酒店机器人

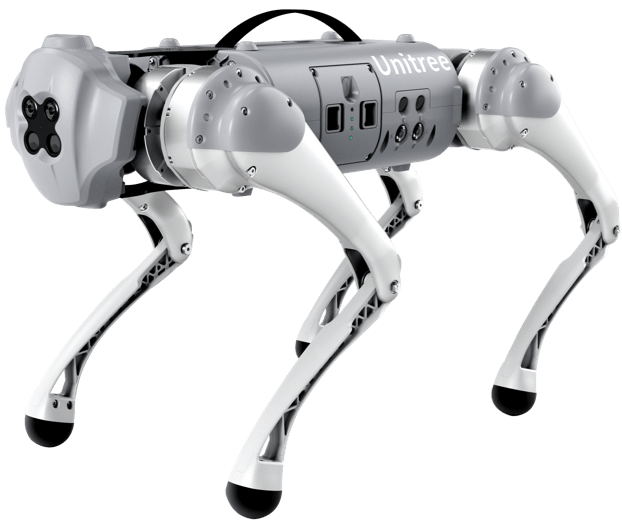
机器狗
- 美国波士顿公司的BigDog

- 小米铁蛋

- 中国宇树
1992年 美国波士顿
2016年 中国宇树
2021年 小米铁蛋
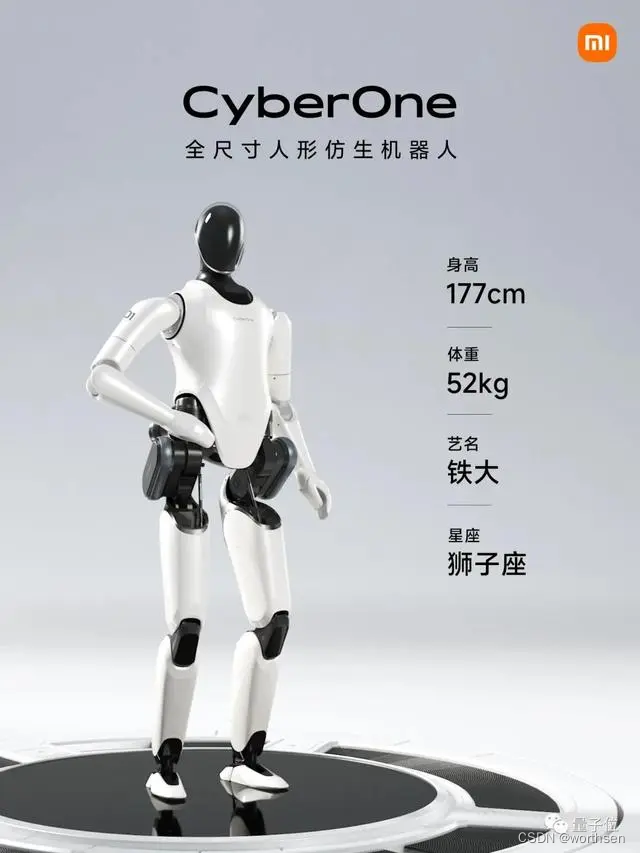
人形机器人
- 美国特斯拉

- 中国小米
无人机
- 大疆无人机

- 某工程师开发的

3 技术
3.1 机器人学分类
-
卡耐基梅隆大学机器人学分类:
1、感知。视觉传感器、图像传感器、触觉和力传感器、惯导等。
2、认知。人工智能、知识表达、规划、任务调度、机器学习等。
3、行为。运动学、动力学、控制、manipulation和locomotion等。
4、数学基础。最优估计、微分几何、计算几何、运筹学等。 -
一般分类:
1、机械
Solidworks画基本的机械图。
2、硬件
模电、数电、数字信号处理;
Altium Designer、Allegro;
3、软件
C开发机器人底层的控制程序(单片机);
C++开发算法(SLAM);
Python、Shell 日志压缩,OTA升级等脚本编写等;
MATLAB、Julia 做算法验证;
Linux、ROS、Qt、Go、Java等。
4、数学、算法
高等数学(微积分学)>线性代数>概率论与数理统计>大学物理>复变函数;
有微积分(控制相关),傅立叶变换(信号处理相关),随机过程(状态估计相关),矩阵论(基础),还有最优化的知识(控制决策相关)
动力学建模,非线性控制,最优控制,SLAM,状态滤波,强化学习,计算机视觉(分类、识别、跟踪),自然语言处理。
3.2 功能分类
感知、决策、执行。
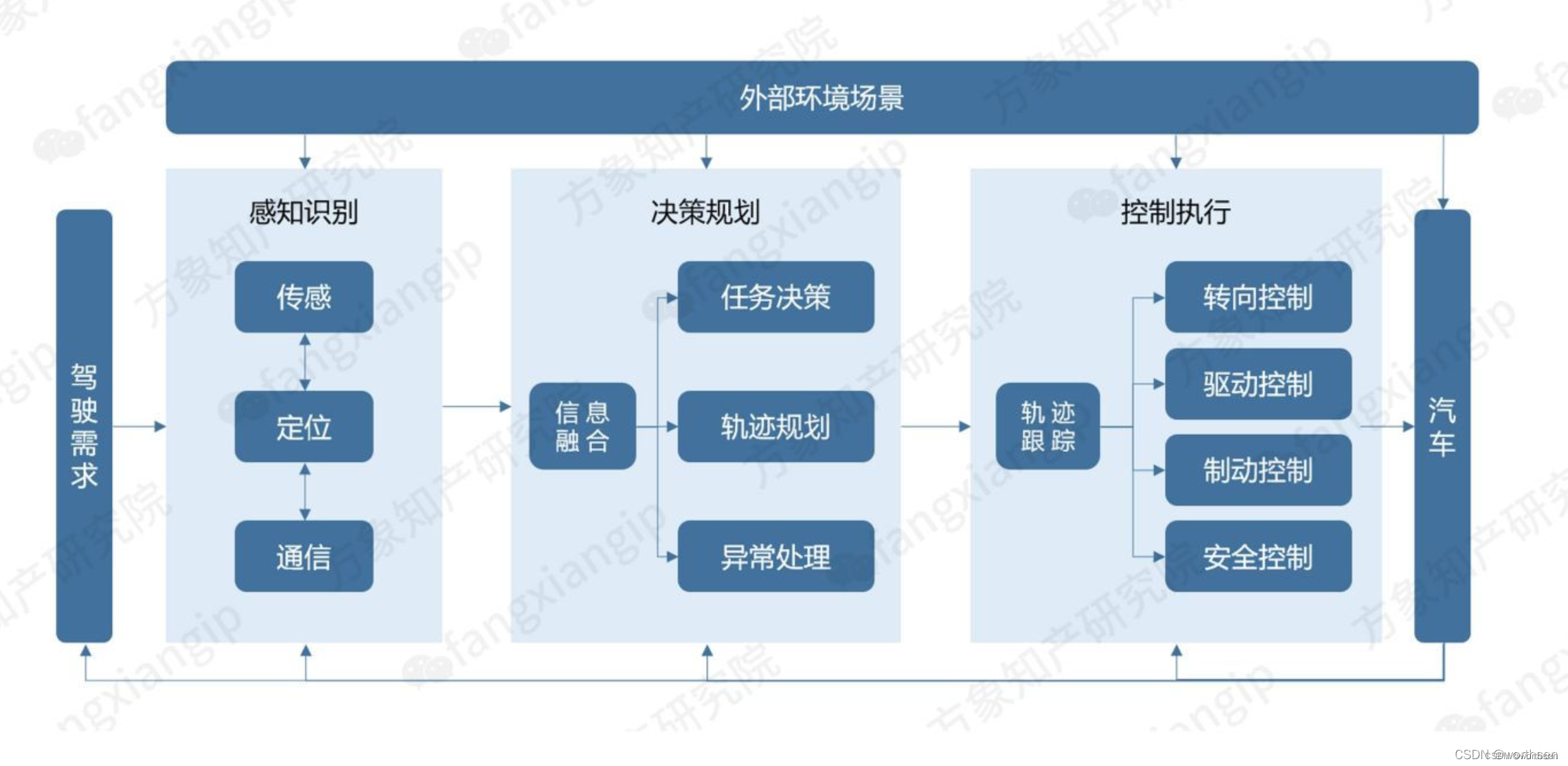
3.2.1 感知
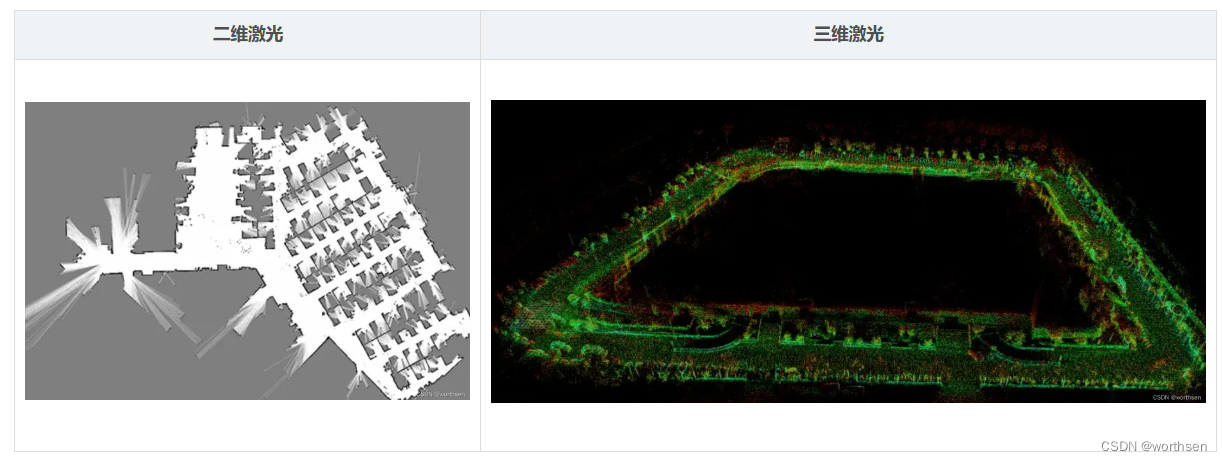
- 倍加福单线激光雷达

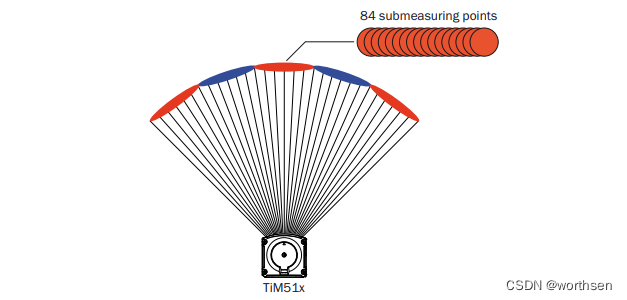
三角测距和ToF(光速)测距。
机器人开发–雷达lidar
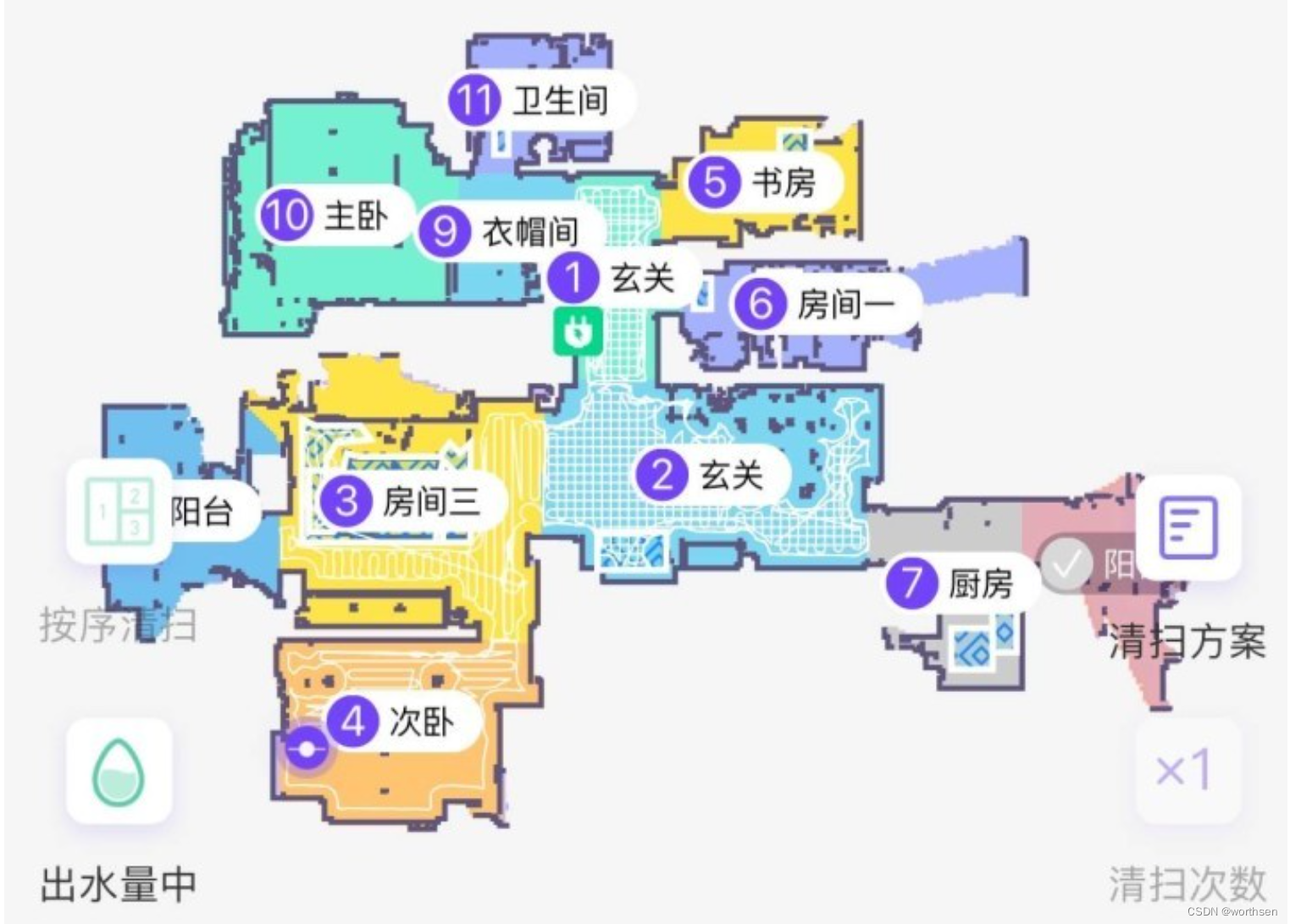
对应地图:
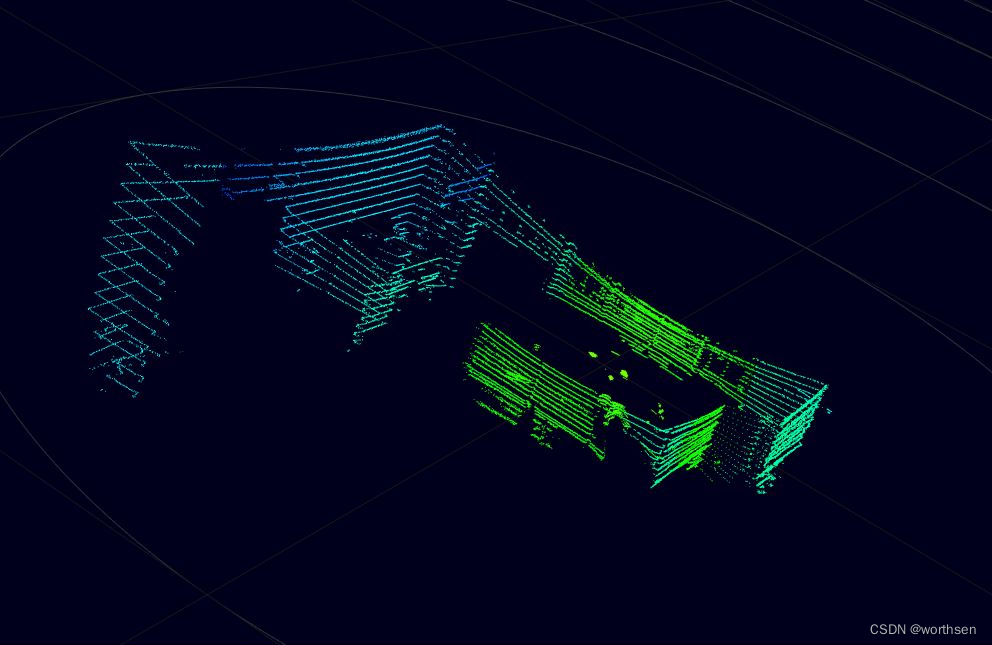
- 多线雷达
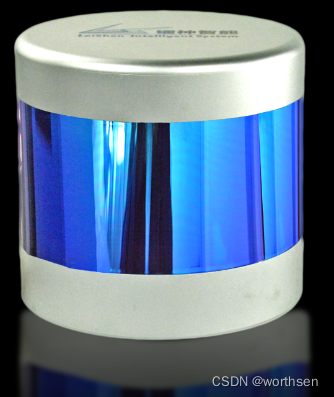
点云数据图如下:
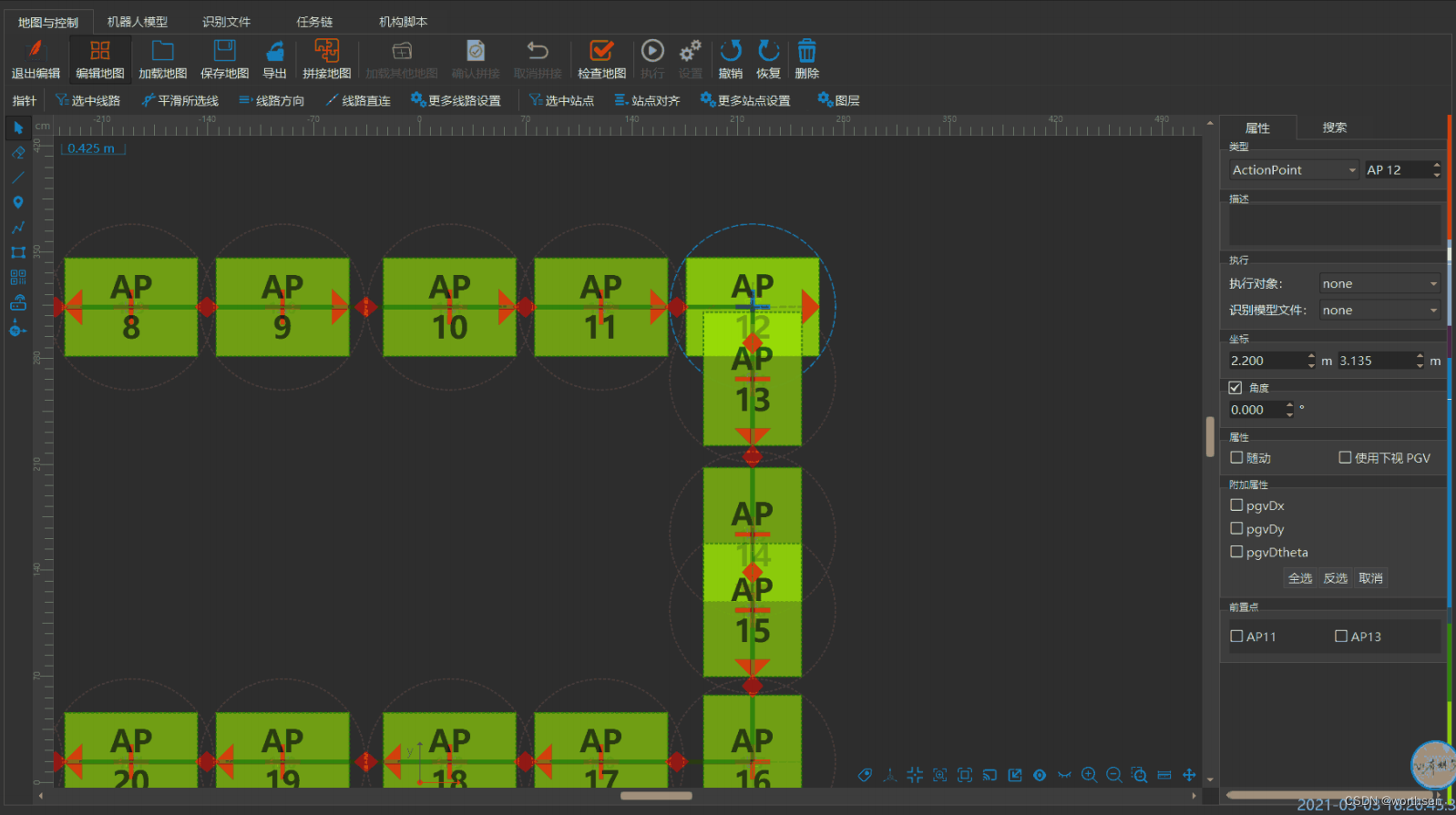
- 地图
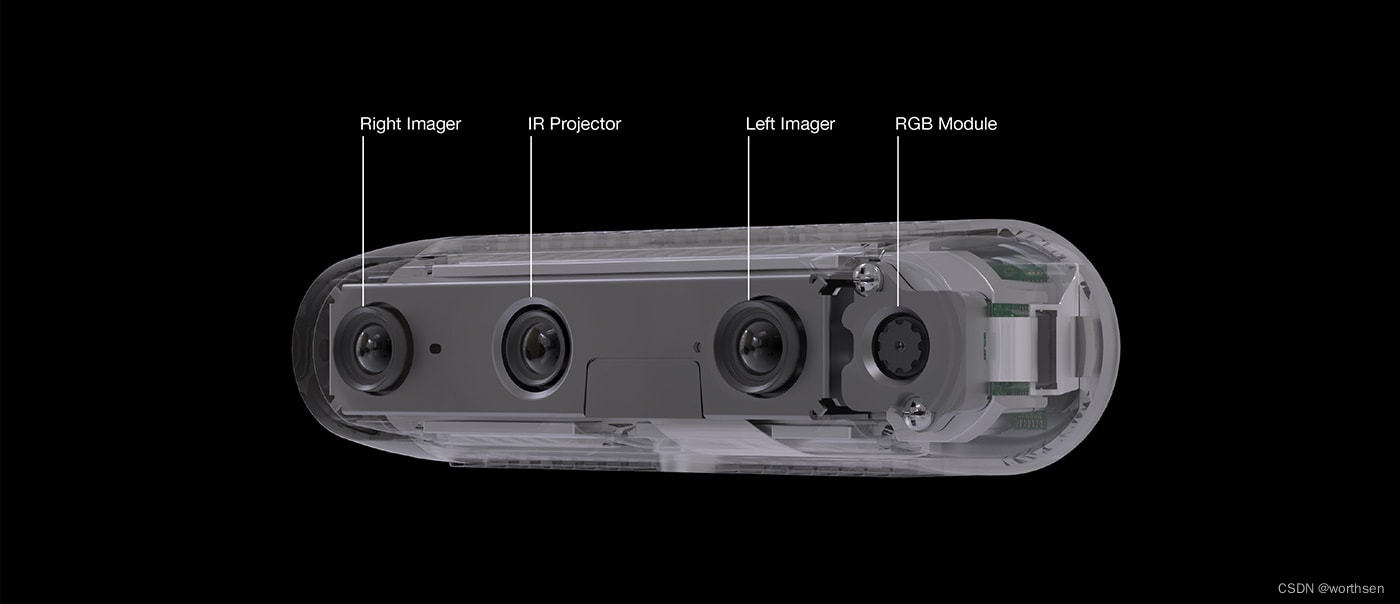
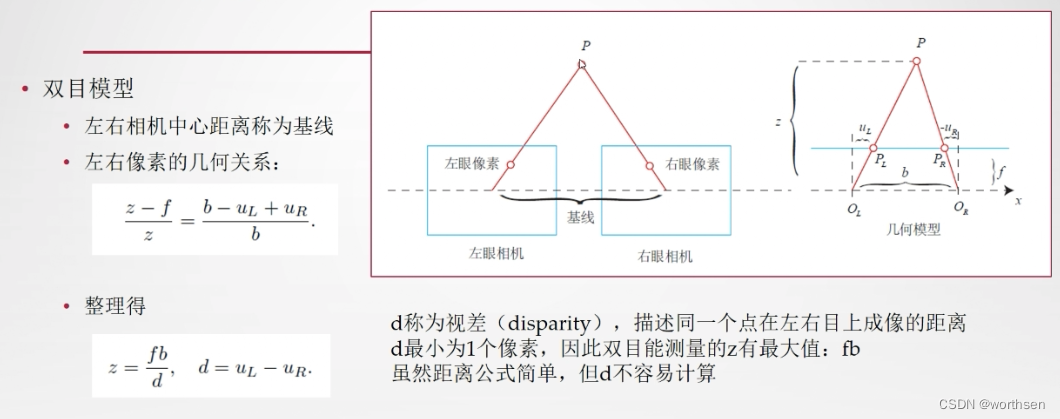
- 双目相机
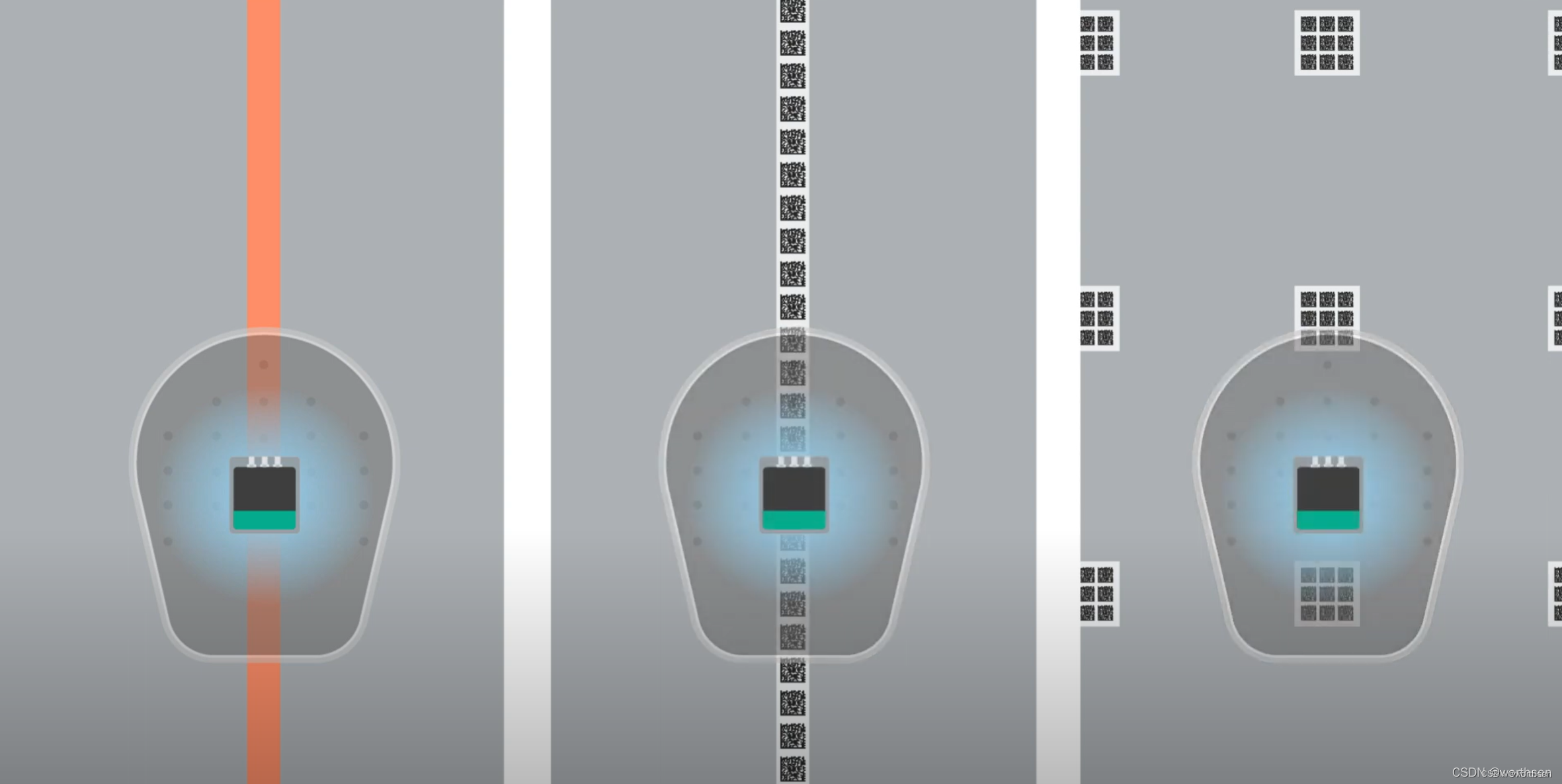
- 读码相机(二维码)

- 接近开关


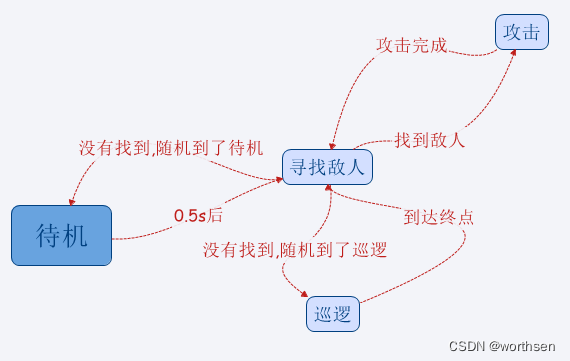
3.2.2 决策
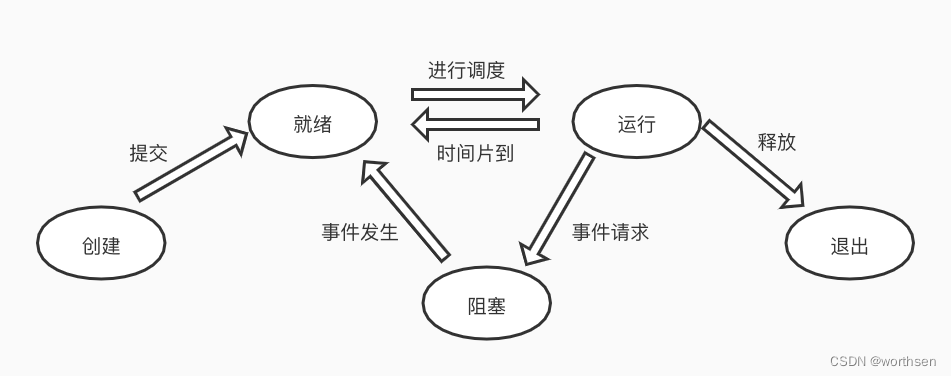
- 状态机
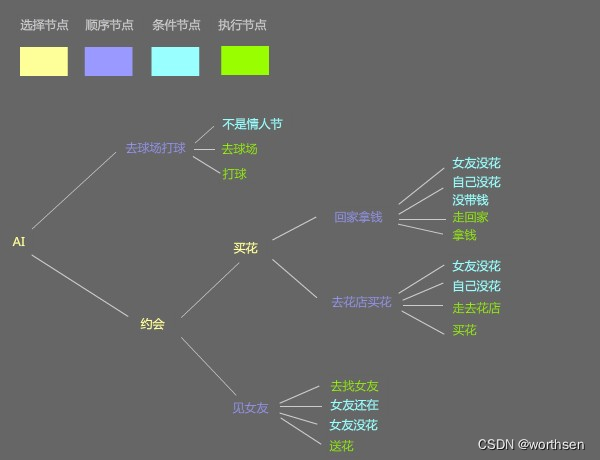
- 行为树
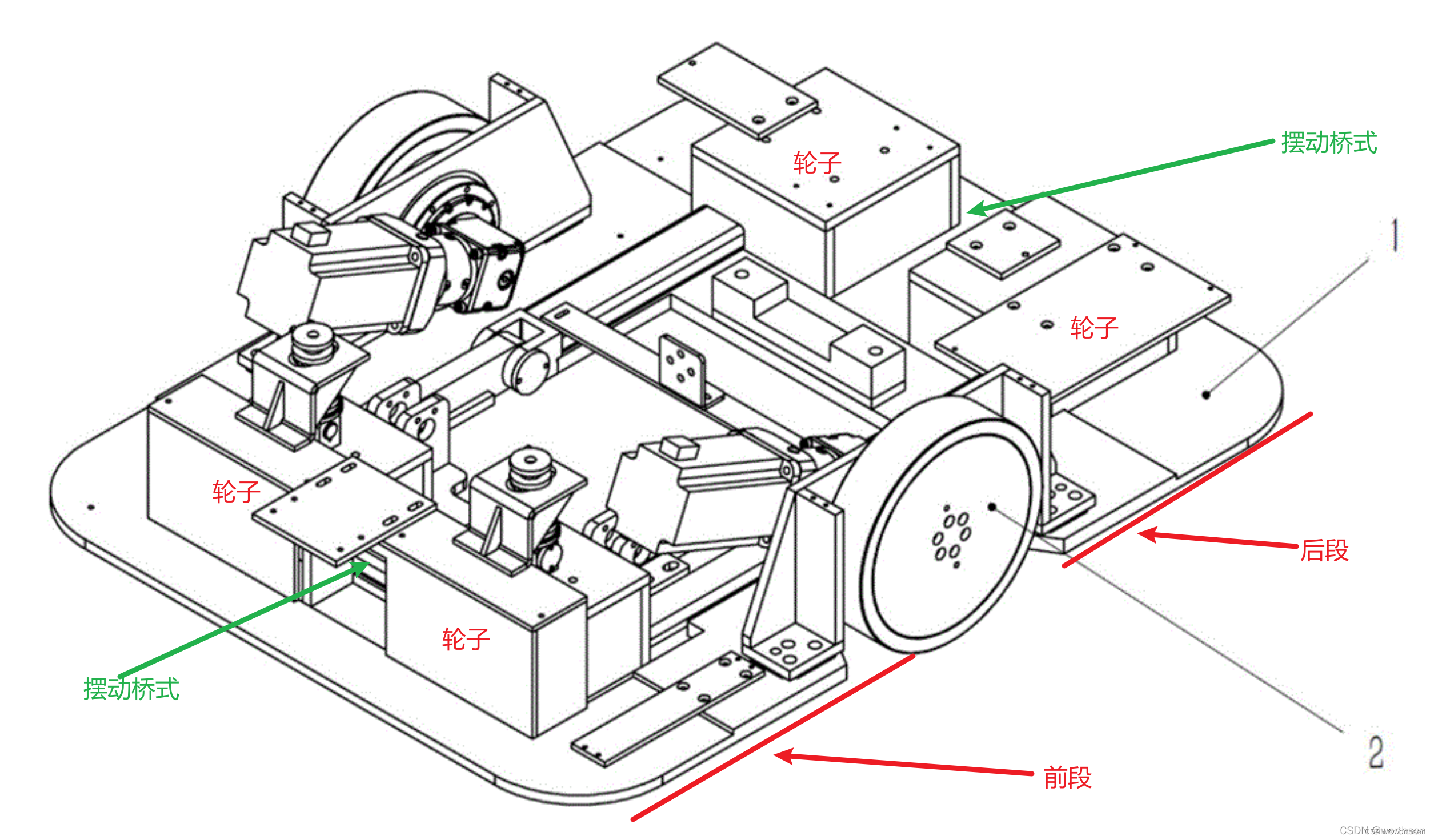
3.2.3 执行
AGV减震机构
- 驱动浮动,垂直导柱
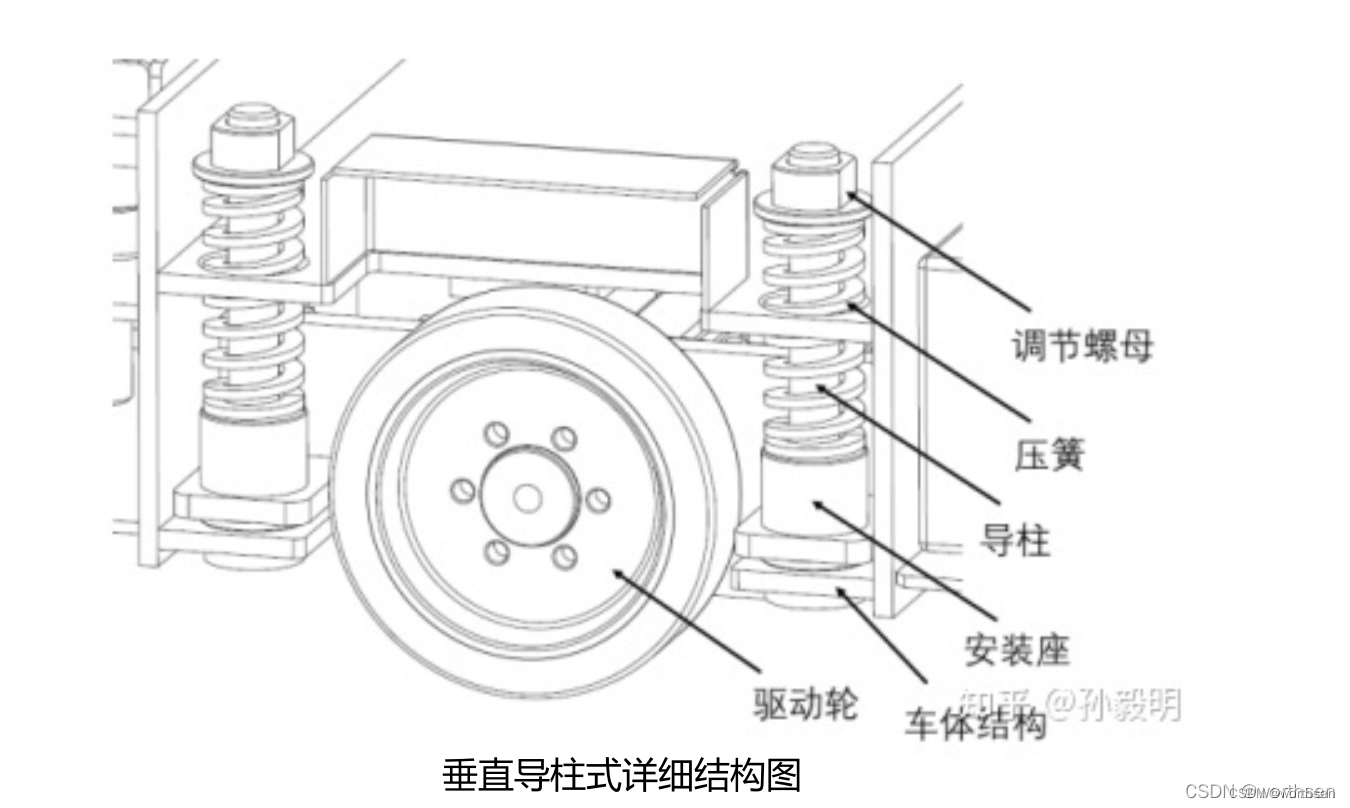
- 双段底盘浮动
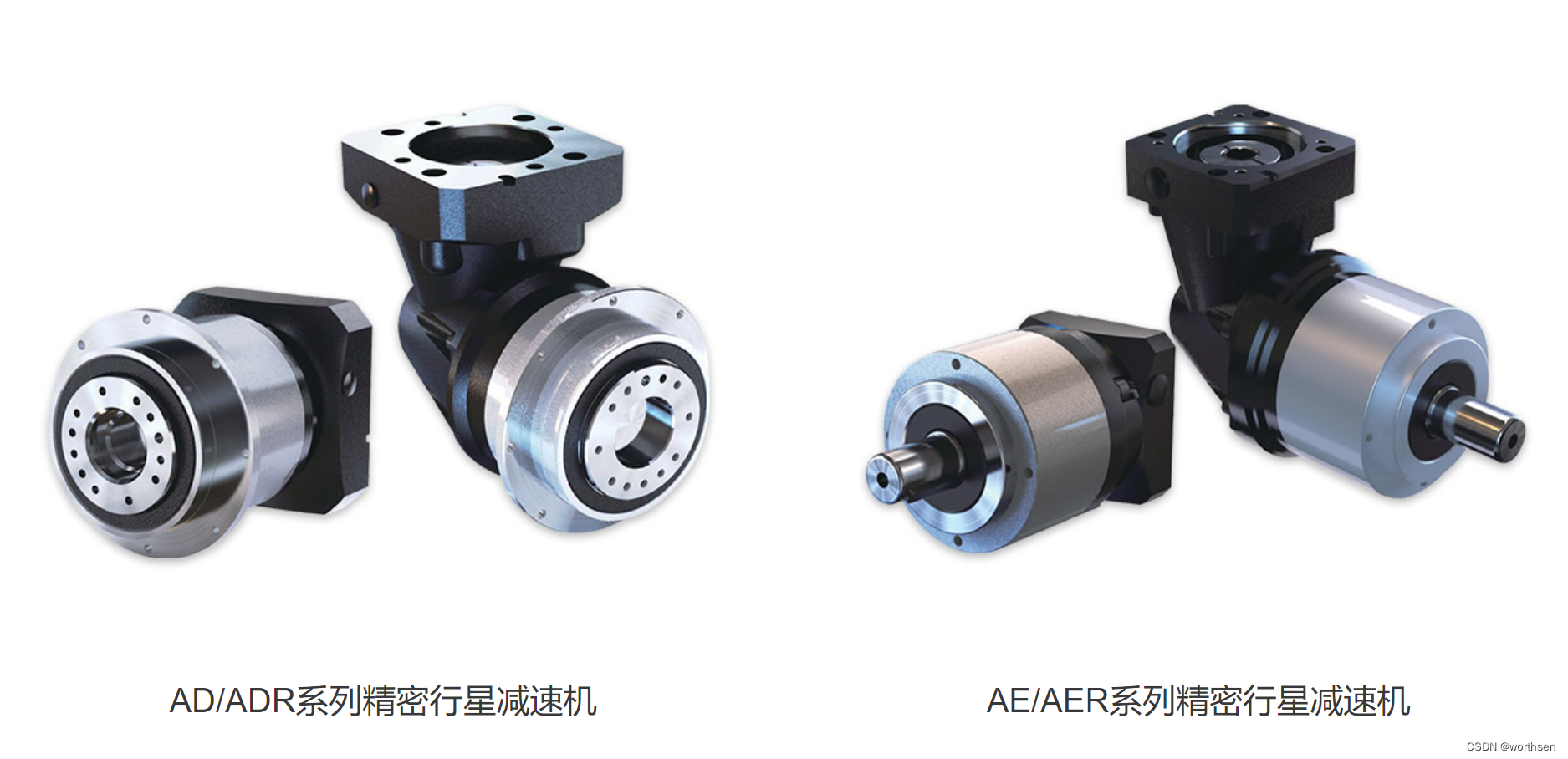
减速机
减速机占用工业机器人成本 35% 左右。
减速器是一种由封闭在刚性壳体内的齿轮传动、蜗杆传动、齿轮-蜗杆传动所组成的独立部件,常用作原动件与工作机之间的减速传动装置 。在原动机和工作机或执行机构之间起匹配转速和传递转矩的作用,在现代机械中应用极为广泛。

电机
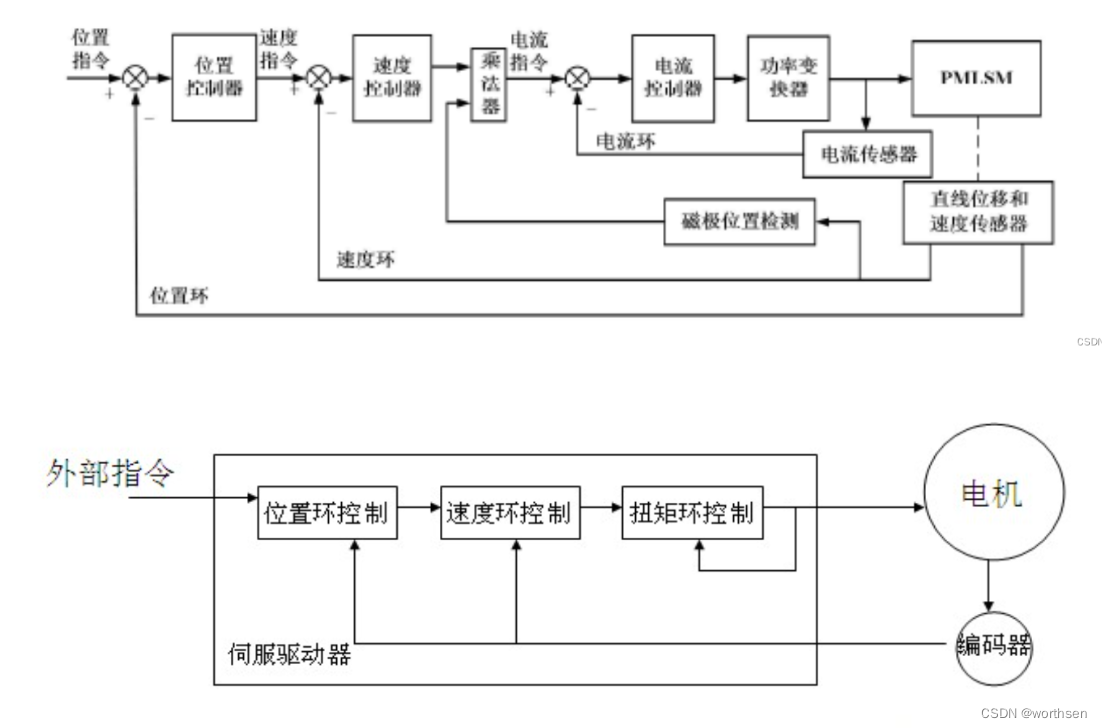
- 伺服电机:电流环、速度环、位置环,pid控制
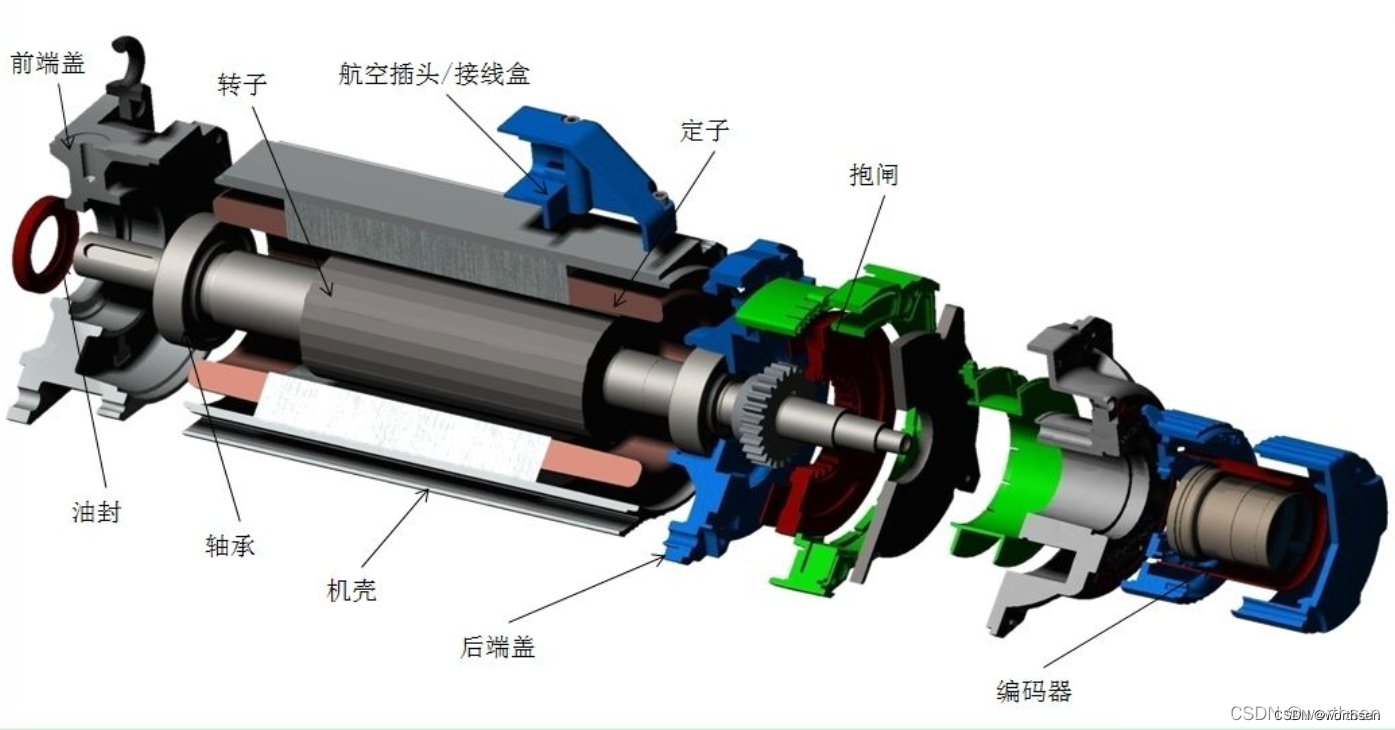

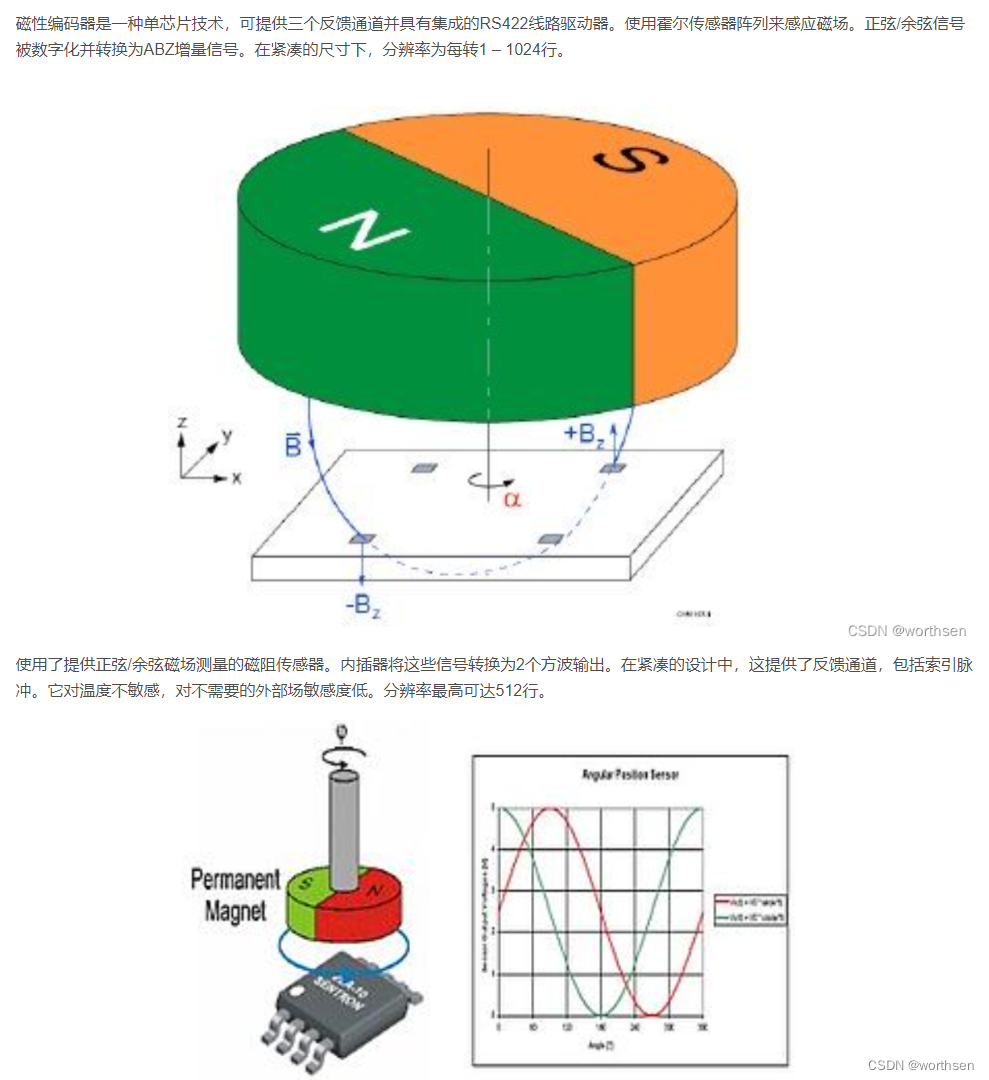
编码器

编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。
光编:

磁编:
丝杠与导轨
- 滚珠丝杠

- 直线导轨

参考
1、wiki–机器人
2、Kiva(亚马逊)机器人介绍
3、机器人开发–技术路线简介
4、状态机与行为树BT
5、AGV 减震结构对比分析
6、我国机器人产业规模超千亿元
7、关于机械臂的发展历史
8、机械臂–发展现状与资料汇总
9、全球AMR调度系统分析(RMS、TMS)
10、机器人开发–接近开关
11、机器人开发–Pepperl+Fuchs倍加福激光雷达系列
12、机器人开发–雷达lidar
13、激光雷达–C16镭神16线三维激光雷达介绍
14、机器人开发–D435
15、机器人开发–减速机
16、机器人开发–pgv 视觉引导(Position Guided Vision)
17、机器人开发–扫地机器人系统的解决方案
18、机器人开发–机器人资料汇总
19、机器人开发–NDC方案
20、机器人开发–电机中的电流环、速度环、位置环
21、机器人开发–二维激光SLAM介绍
22、机器人开发–丝杠与导轨
23、机器人开发–AGV控制系统
24、机器人开发–伺服电机介绍
25、机器人开发–编码器

