
- 1【Sql Server】C#通过拼接代码的方式组合添加sql语句,会出现那些情况,参数化的作用
- 2Markdown语法之数学公式【总结】_markdown数学公式 点乘
- 3牛客_将链表m到n节点间的元素进行反转_c++反转链表中m位置到n位置的元素
- 4nginx作为tcp的负载均衡
- 5Xcode6模拟器路径的变更&应用沙盒地址的变更_xcode 沙盒路径 变化
- 6DELL PowerEdge R720XD 磁盘RAID及Hot Spare热备盘配置_dellr720配置raid
- 7Linux运维工程师面试题全面汇总(2023)_linux运维面试
- 8压缩qcow2虚拟机镜像文件_pve qcow2 压缩
- 9第二节HarmonyOS DevEco Studio创建项目以及界面认识_deveco studio 创建harmony项目
- 10Hadoop从入门到入土(第十天)_如果某个datanode的节点上的空闲空间低于特定的临界点,按照均衡策略,系统就
STM32控制舵机_32单片机舵机追踪
赞
踩
【冉冰的成长日记013】
咕了很久没有去更新是因为我觉得自己啥都不会,也确实如此qaq。。。
这篇文章就主要来讲解一下舵机的控制吧(划个水
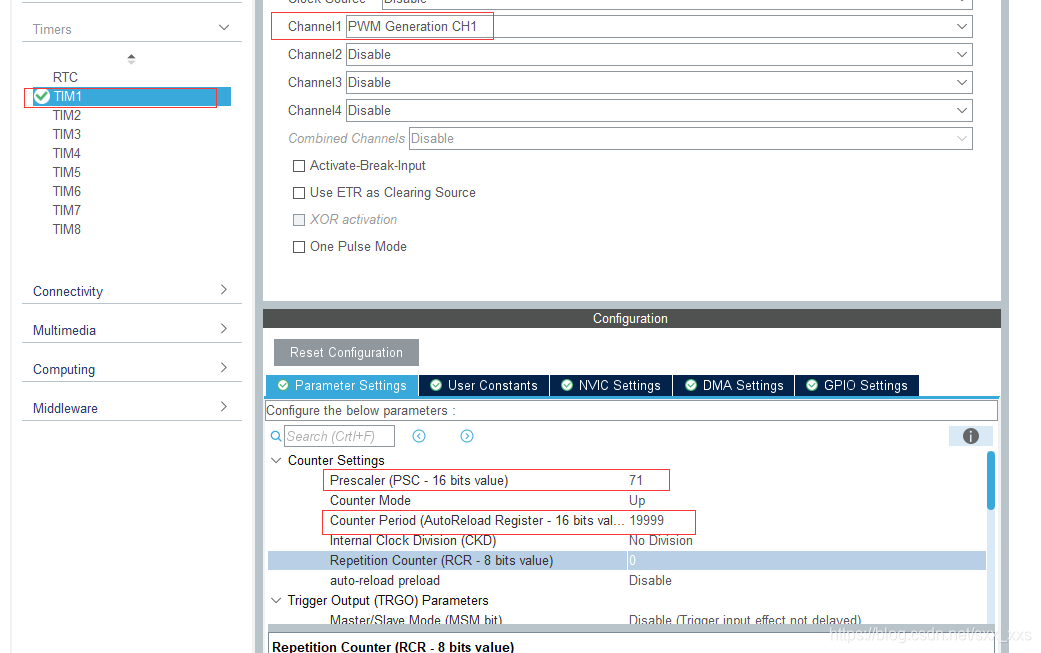
首先,我们见到的绝大多数的舵机的参数都是 舵机参数:f=50hz,t=20ms。
因此我们需要去计算 占空比 =舵机角度时间/t。
t=(PSC+1)*(ARR+1)/TCLK
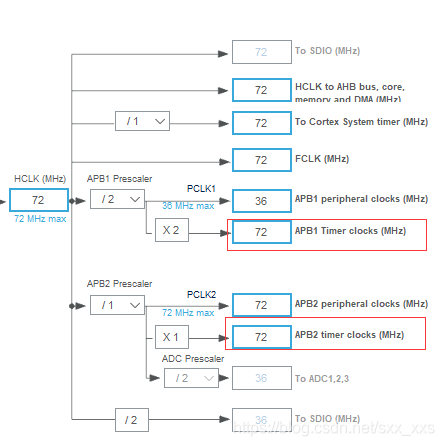
通常情况下psc在配置时设定为TCLK的值除以1M-1,比如由于我设定的是TIM1使用的是高级定时器是挂载在APB2上的,通过cubemx的时钟树可以看到APB2的TCLK是72M,所以PSC的值就是71,或者写成 “72-1”也可以
由于t=20ms,所以arr就要设置为20000-1了
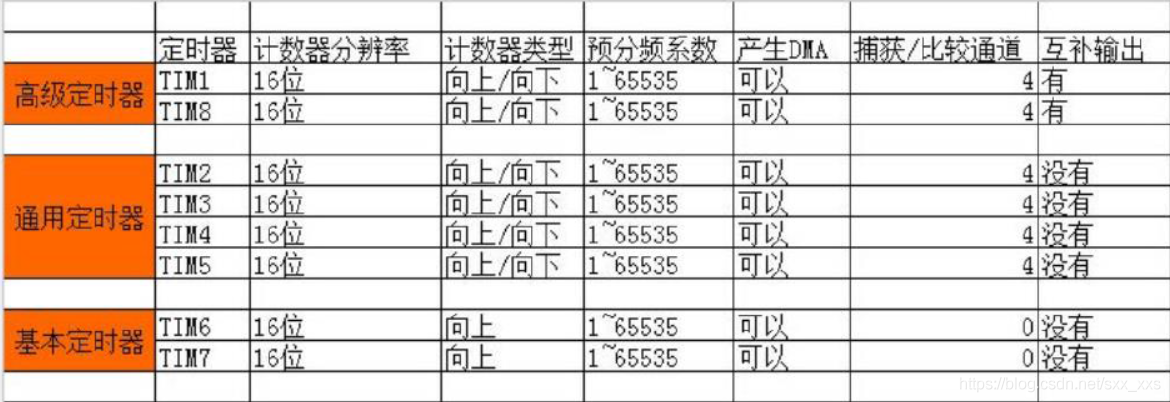
p.s.:这里补充一下,TIM1和TIM8是高级定时器挂载在APB2上,其他的定时器挂载在APB1上,所以在配置psc的时候要要看清自己所选的TIM和所对应的TCLK
然后代码部分就是
/* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ __HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1,500); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1,1000); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1,1500); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1,2000); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim1, TIM_CHANNEL_1,2500); HAL_Delay(1000); } /* USER CODE END 3 */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
打开定时器中断,然后通过控制电平宽度就可以控制舵机转动角度来进行舵机驱动的驱动了
这里补充一下为什么设置的是500-2500对应的角度是从0-180度,如果我没记错的话舵机的控制脉冲范围是0.5ms-2.5ms,t是20ms,所以对应的值也就是500-2500了。
最后随便聊两句
最近因为这个电赛,被疯狂折磨…
怎么说呢,本来觉得是个成长的过程,结果一场大暴雨下来搬来搬去的宿舍和实验室没电等等诸多情况搞得身心疲惫,一度怀疑参加今年的电赛是个错误的决定。
ok,吐槽的话就说这么多吧,在这里分享一下最近的学习内容,有感兴趣的同学可以留言,我可以分享一些源码给你,共同学习哦
以下是最近学习的内容,
有L298N和TB6612FNG驱动电机,产生pwm的输出,pid的调试我还没试,比赛前肯定要写一写吧
空心杯
oled屏
mpu6050
光电传感器
然后还有这两天在看到openmv
这么一罗列,嗯确实没学啥0.0
有啥需要的就留言或者私信吧,或许以后为了水访问量我也会写两篇的

