
- 1深度学习练手项目(二)-----利用PyTorch进行线性回归_[w, b] = model.parameters()
- 2服务器与许可证版本不匹配,终端错误信息的原因以及解决办法大全
- 3【Android应用开发之前端——简单计算器效果】_android计算器功能实现
- 4数据库学习:MySQL的数据类型_类型为5位整数2位小数的数值型
- 5stable-diffusion领域prompt集合_stable diffusion prompt分享
- 6C++转换为C需要注意的各项问题_c++转c
- 7【深度学习】 Python 和 NumPy 系列教程(四):Python容器:2、元组tuple详解(初始化、索引和切片、元组特性、常用操作、拆包、遍历)_numpy tuple
- 8使用caffe训练时Loss变为nan的原因_caffe预测结果是nan
- 9高级Android研发面试必问:Android屏幕适配全方位解析_layout-sw600dp
- 10Jetpack新成员SplashScreen:为全新的应用启动效果赋能!_jetpack compose splash page
Rust使用feature特性和条件编译,以及常用feature使用说明
赞
踩

Cargo Feature 是非常强大的机制,可以为大家提供条件编译和可选依赖的高级特性,可以为你省下不少的代码量来判断操作系统和条件编译等功能。rust官方条件编译文档:Conditional compilation - The Rust Reference
features特性
Featuure 可以通过 Cargo.toml 中的 [features] 部分来定义:其中每个 feature 通过列表的方式指定了它所能启用的其他 feature 或可选依赖。
假设我们有一个 2D 图像处理库,然后该库所支持的图片格式可以通过以下方式启用:
- [features]
- # 定义一个feature并启动: webp, 但它并没有启用其它 feature
- webp = []
当定义了 webp 后,我们就可以在代码中通过 cfg 表达式来进行条件编译(cfg表达式讲解说明:https://xiaoshen.blog.csdn.net/article/details/137040041?spm=1001.2014.3001.5502)。例如项目中的 lib.rs 可以使用以下代码对 webp 模块进行条件引入:
- #[cfg(feature = "webp")]
- pub mod webp;
#[cfg(feature = "webp")] 的含义是:只有在 webp feature 被定义后,以下的 webp 模块才能被引入进来。由于我们之前在 [features] 里定义了 webp,因此以上代码的 webp 模块会被成功引入。
在 Cargo.toml 中定义的 feature 会被 Cargo 通过命令行参数 --cfg 传给 rustc,最终由后者完成编译:rustc --cfg ...。若项目中的代码想要测试 feature 是否存在,可以使用 cfg属性 或 cfg 宏。
之前我们提到了一个 feature 还可以开启其他 feature,举个例子,例如 ICO 图片格式包含 BMP 和 PNG,因此当 ICO 图片格式被启用后,它还得确保启用 BMP 和 PNG 格式:
- [features]
- bmp = []
- png = []
- ico = ["bmp", "png"]
- webp = []
对此,我们可以理解为: bmp 和 png 是开启 ico 的先决条件。
Feature 名称可以包含来自 Unicode XID standard 定义的字母,允许使用 _ 或 0-9 的数字作为起始字符,在起始字符后,还可以使用 -、+ 或 . 。
但是我们还是推荐按照 http://crates.io 的方式来设置 Feature 名称 : crate.io 要求名称只能由 ASCII 字母数字、_、- 或 + 组成。
default feature
默认情况下,所有的 feature 都会被自动禁用,可以通过 default 来启用它们:
- [features]
- default = ["ico", "webp"]
- bmp = []
- png = []
- ico = ["bmp", "png"]
- webp = []
使用如上配置的项目被构建时,default feature 首先会被启用,然后它接着启用了 ico 和 webp feature,当然我们还可以关闭 default:
--no-default-features命令行参数可以禁用defaultfeaturedefault-features = false选项可以在依赖声明中指定
当你要去改变某个依赖库的
default 启用的 feature 列表时(例如觉得该库引入的 feature 过多,导致最终编译出的文件过大),需要格外的小心,因为这可能会导致某些功能的缺失
系统自带feature
target_arch:目标的 CPU 架构
示例值:
- "x86"
- "x86_64"
- "mips"
- "powerpc"
- "powerpc64"
- "arm"
- "aarch64"
target_feature:当前编译目标可用的每个平台特性
示例值:
- "avx"
- "avx2"
- "crt-static"
- "rdrand"
- "sse"
- "sse2"
- "sse4.1"
示例值:
- "windows"
- "macos"
- "ios"
- "linux"
- "android"
- "freebsd"
- "dragonfly"
- "openbsd"
- "netbsd"
- "none" (typical for embedded targets)
target_family :目标的更通用的描述,例如目标通常所属的操作系统或体系结构的系列。
示例值:
- "unix"
- "windows"
- "wasm"
可选依赖
当依赖被标记为 "可选 optional" 时,意味着它默认不会被编译。假设我们的 2D 图片处理库需要用到一个外部的包来处理 GIF 图片:
- [dependencies]
- gif = { version = "0.11.1", optional = true }
这种可选依赖的写法会自动定义一个与依赖同名的 feature,也就是 gif feature,这样一来,当我们启用 gif feautre时,该依赖库也会被自动引入并启用:例如通过 --feature gif 的方式启用 feauture。
注意:目前来说,[fetuare] 中定义的 feature 还不能与已引入的依赖库同名。但是在 nightly 中已经提供了实验性的功能用于改变这一点: namespaced features
当然,我们还可以通过显式定义 feature 的方式来启用这些可选依赖库,例如为了支持 AVIF 图片格式,我们需要引入两个依赖包,由于 AVIF 是通过 feature 引入的可选格式,因此它依赖的两个包也必须声明为可选的:
- [dependencies]
- ravif = { version = "0.6.3", optional = true }
- rgb = { version = "0.8.25", optional = true }
-
- [features]
- avif = ["ravif", "rgb"]
之后,avif feature 一旦被启用,那这两个依赖库也将自动被引入。
注意:我们之前也讲过条件引入依赖的方法,那就是使用平台相关的依赖,与基于 feature 的可选依赖不同,它们是基于特定平台的可选依赖。
依赖库自身的 feature
就像我们的项目可以定义 feature 一样,依赖库也可以定义它自己的 feature、也有需要启用的 feature 列表,当引入该依赖库时,我们可以通过以下方式为其启用相关的 features :
- [dependencies]
- serde = { version = "1.0.118", features = ["derive"] }
以上配置为 serde 依赖开启了 derive feature,还可以通过 default-features = false 来禁用依赖库的 default feature :
- [dependencies]
- flate2 = { version = "1.0.3", default-features = false, features = ["zlib"] }
这里我们禁用了 flate2 的 default feature,但又手动为它启用了 zlib feature。
注意:这种方式未必能成功禁用default,原因是可能会有其它依赖也引入了flate2,并且没有对default进行禁用,那此时default依然会被启用。
除此之外,还能通过下面的方式来间接开启依赖库的 feature :
- [dependencies]
- jpeg-decoder = { version = "0.1.20", default-features = false }
-
- [features]
- # Enables parallel processing support by enabling the "rayon" feature of jpeg-decoder.
- parallel = ["jpeg-decoder/rayon"]
如上所示,我们定义了一个 parallel feature,同时为其启用了 jpeg-decoder 依赖的 rayon feature。
通过命令行参数启用feature
以下的命令行参数可以启用指定的 feature :
--features FEATURES: 启用给出的 feature 列表,可以使用逗号或空格进行分隔,若你是在终端中使用,还需要加上双引号,例如--features "foo bar"。 若在工作空间中构建多个package,可以使用package-name/feature-name为特定的成员启用 features--all-features: 启用命令行上所选择的所有包的所有 features--no-default-features: 对选择的包禁用defaultfeatue
feature同一化
feature 只有在定义的包中才是唯一的,不同包之间的 feature 允许同名。因此,在一个包上启用 feature 不会导致另一个包的同名 feature 被误启用。
当一个依赖被多个包所使用时,这些包对该依赖所设置的 feature 将被进行合并,这样才能确保该依赖只有一个拷贝存在,这个过程就被称之为同一化。
这里,我们使用 winapi 为例来说明这个过程。首先,winapi 使用了大量的 features;然后我们有两个包 foo 和 bar 分别使用了它的两个 features,那么在合并后,最终 winapi 将同时启四个 features :
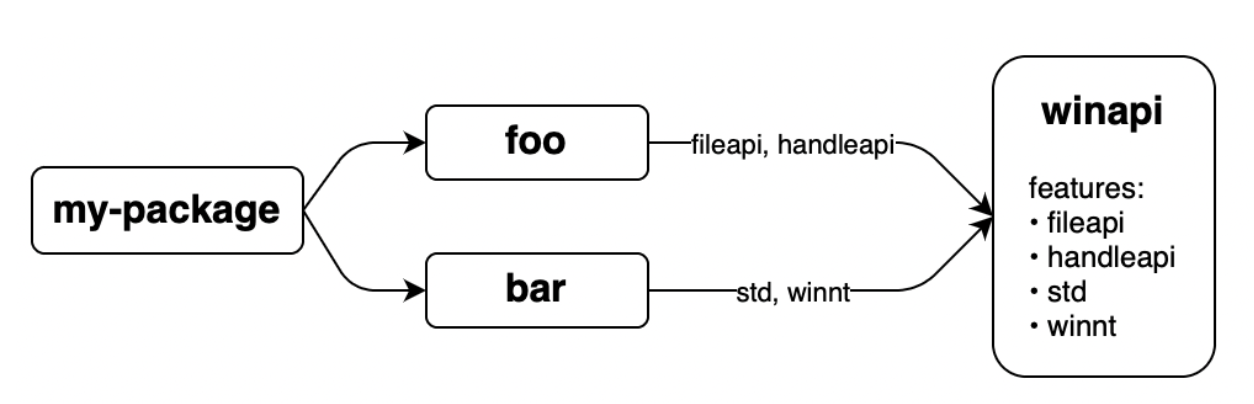
由于这种不可控性,我们需要让 启用feature = 添加特性 这个等式成立,换而言之,启用一个 feature 不应该导致某个功能被禁止。这样才能的让多个包启用同一个依赖的不同features。
例如,如果我们想可选的支持 no_std 环境(不使用标准库),那么有两种做法:
- 默认代码使用标准库的,当该
no_stdfeature 启用时,禁用相关的标准库代码 - 默认代码使用非标准库的,当
stdfeature 启用时,才使用标准库的代码
前者就是功能削减,与之相对,后者是功能添加,根据之前的内容,我们应该选择后者的做法:
- #![no_std]
-
- #[cfg(feature = "std")]
- extern crate std;
-
- #[cfg(feature = "std")]
- pub fn function_that_requires_std() {
- // ...
- }
彼此互斥的feature
某极少数情况下,features 之间可能会互相不兼容。我们应该避免这种设计,因为如果一旦这么设计了,那你可能需要修改依赖图的很多地方才能避免两个不兼容 feature 的同时启用。
如果实在没有办法,可以考虑增加一个编译错误来让报错更清晰:
- #[cfg(all(feature = "foo", feature = "bar"))]
- compile_error!("feature \"foo\" and feature \"bar\" cannot be enabled at the same time");
当同时启用 foo 和 bar 时,编译器就会爆出一个更清晰的错误:feature foo 和 bar 无法同时启用。
总之,我们还是应该在设计上避免这种情况的发生,例如:
- 将某个功能分割到多个包中
- 当冲突时,设置 feature 优先级,cfg-if 包可以帮助我们写出更复杂的
cfg表达式
检视已解析的features
在复杂的依赖图中,如果想要了解不同的 features 是如何被多个包多启用的,这是相当困难的。好在 cargo tree 命令提供了几个选项可以帮组我们更好的检视哪些 features 被启用了:
cargo tree -e features ,该命令以依赖图的方式来展示已启用的 features,包含了每个依赖包所启用的特性:
- $ cargo tree -e features
- test_cargo v0.1.0 (/Users/sunfei/development/rust/demos/test_cargo)
- └── uuid feature "default"
- ├── uuid v0.8.2
- └── uuid feature "std"
- └── uuid v0.8.2
cargo tree -f "{p} {f}" 命令会提供一个更加紧凑的视图:
- % cargo tree -f "{p} {f}"
- test_cargo v0.1.0 (/Users/sunfei/development/rust/demos/test_cargo)
- └── uuid v0.8.2 default,std
cargo tree -e features -i foo,该命令会显示 features 会如何"流入"指定的包 foo 中:
- cargo tree -e features -i uuid
- uuid v0.8.2
- ├── uuid feature "default"
- │ └── test_cargo v0.1.0 (/Users/sunfei/development/rust/demos/test_cargo)
- │ └── test_cargo feature "default" (command-line)
- └── uuid feature "std"
- └── uuid feature "default" (*)
该命令在依赖图较为复杂时非常有用,使用它可以让你了解某个依赖包上开启了哪些 features 以及其中的原因。
大家可以查看官方的 cargo tree 文档获取更加详细的使用信息。
Feature解析器V2版本
我们还能通过以下配置指定使用 V2 版本的解析器( resolver ):
- [package]
- name = "my-package"
- version = "1.0.0"
- resolver = "2"
V2 版本的解析器可以在某些情况下避免 feature 同一化的发生,具体的情况在这里有描述,下面做下简单的总结:
- 为特定平台开启的
features且此时并没有被构建,会被忽略 Build-dependencies和proc-macros不再跟普通的依赖共享featuresDev-dependencies的features不会被启用,除非正在构建的对象需要它们(例如测试对象、示例对象等)
对于部分场景而言,feature 同一化确实是需要避免的,例如,一个构建依赖开启了 std feature,而同一个依赖又被用于 no_std 环境,很明显,开启 std 将导致错误的发生。
说完优点,我们再来看看 V2 的缺点,其中增加编译构建时间就是其中之一,原因是同一个依赖会被构建多次(每个都拥有不同的 feature 列表)。
由于此部分内容可能只有极少数的用户需要,因此我们并没有对其进行扩展,如果大家希望了解更多关于 V2 的内容,可以查看 官方文档
构建脚本
构建脚本可以通过 CARGO_FEATURE_<name> 环境变量获取启用的 feauture 列表,其中 <name> 是 feature 的名称,该名称被转换成大全写字母,且 - 被转换为 _。
required-features
该字段可以用于禁用特定的 Cargo Target:当某个 feature 没有被启用时,查看这里获取更多信息。
SemVer兼容性
启用一个 feautre 不应该引入一个不兼容 SemVer 的改变。例如,启用的 feature 不应该改变现有的 API,因为这会给用户造成不兼容的破坏性变更。 如果大家想知道哪些变化是兼容的,可以参见官方文档。
总之,在新增/移除 feature 或可选依赖时,你需要小心,因此这些可能会造成向后不兼容性。更多信息参见这里,简单总结如下:
- 在发布
minor版本时,以下通常是安全的: - 新增 feature 或可选依赖
- 修改某个依赖的 features
- 在发布
minor时,以下操作应该避免: - 移除 feature 或可选依赖
- 将现有的公有代码放在某个 feature 之后
- 从 feature 列表中移除一个 feature
feature文档和发现
将你的项目支持的 feature 信息写入到文档中是非常好的选择:
- 我们可以通过在
lib.rs的顶部添加文档注释的方式来实现。例如regex就是这么做的。 - 若项目拥有一个用户手册,那也可以在那里添加说明,例如 serde.rs。
- 若项目是二进制类型(可运行的应用服务,包含
fn main入口),可以将说明放在README文件或其他文档中,例如 sccache。
特别是对于不稳定的或者不该再被使用的 feature 而言,它们更应该被放在文档中进行清晰的说明。
当构建发布到 docs.rs 上的文档时,会使用 Cargo.toml 中的元数据来控制哪些 features 会被启用。查看 docs.rs 文档获取更多信息。
如何发现features
若依赖库的文档中对其使用的 features 做了详细描述,那你会更容易知道他们使用了哪些 features 以及该如何使用。
当依赖库的文档没有相关信息时,你也可以通过源码仓库的 Cargo.toml 文件来获取,但是有些时候,使用这种方式来跟踪并获取全部相关的信息是相当困难的。

