
- 1怎么使用JMeter进行性能测试?_如何使用jmeter 5.6.3版本 做性能测试
- 2图解DQN,DDQN,DDPG网络_dqn与ddpg算法的原理图
- 3Flutter输入限制,输入账号密码_flutter inputformatters 不允許輸入空格
- 4基于STM32与OneNet平台的智能家居系统设计(代码开源含自制APP代码)_onenet 编程
- 5独立开发者:走向全能的五大技能_独立开发需要掌握哪些技能
- 6【MySQL系列】使用 ALTER TABLE 语句修改表结构的方法
- 7Leetcode 热题100_leetcode热题100在哪里
- 8阿里前CEO卫哲:我特别反对无人便利店 凤凰新闻 08-24 10:55 原标题:阿里前CEO卫哲:我特别反对无人便利店 卫哲,32岁就成长为史上最年轻的世界500强中国区总裁,36岁成为阿里巴巴CE_东丰便利店凤凰网新闻
- 9java 操作符 重载_为什么Java不支持运算符重载?
- 10第十六届全国大学生智能车竞赛报名信息统计_限拉无7df498
【ROS 01】ROS概述与环境搭建
赞
踩
目录
3.2.2 编辑 helloworld 包下的配置文件 Cmakelist.txt文件
3.3.1.进入 ros 包添加 scripts 目录并编辑 python 文件
3.3.3.编辑 ros 包下的 CamkeList.txt 文件
主要内容:
- ROS的相关概念
- 怎样安装ROS
- 如何搭建ROS的集成开发环境
预期达成的目标如下:
-
了解 ROS 概念、设计目标以及发展历程
-
能够独立安装并运行 ROS
-
能够使用 C++ 或 Python 实现 ROS 版本的 HelloWorld
-
能够搭建 ROS 的集成开发环境
-
了解 ROS 架构设计
案例演示:
1.ROS安装成功后,可以运行内置案例:该案例是通过键盘控制乌龟运动
2007 年,一家名为 柳树车库(Willow Garage)的机器人公司发布了 ROS(机器人操作系统),ROS是一套机器人通用软件框架,可以提升功能模块的复用性,并且随着该系统的不断迭代与完善,如今 ROS 已经成为机器人领域的事实标准。
1. ROS简介
1.1 ROS 概念
ROS全称Robot Operating System(机器人操作系统)
-
ROS是适用于机器人的开源元操作系统
-
ROS集成了大量的工具,库,协议,提供类似OS所提供的功能,简化对机器人的控制
-
还提供了用于在多台计算机上获取,构建,编写和运行代码的工具和库,ROS在某些方面类似于“机器人框架”【分布式,分散计算压力】
-
ROS设计者将ROS表述为“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通讯机制、工具软件包、机器人高层技能以及机器人生态系统的集合体


1.2 ROS设计目标
机器人开发的分工思想,实现了不同研发团队间的共享和协作,提升了机器人的研发效率,为了服务“ 分工”,ROS主要设计了如下目标:
-
代码复用:ROS的目标不是成为具有最多功能的框架,ROS的主要目标是支持机器人技术研发中的代码重用。
-
分布式:ROS是进程(也称为Nodes)的分布式框架,ROS中的进程可分布于不同主机,不同主机协同工作,从而分散计算压力
-
松耦合:ROS中功能模块封装于独立的功能包或元功能包,便于分享,功能包内的模块以节点为单位运行,以ROS标准的IO作为接口,开发者不需要关注模块内部实现,只要了解接口规则就能实现复用,实现了模块间点对点的松耦合连接
-
精简:ROS被设计为尽可能精简,以便为ROS编写的代码可以与其他机器人软件框架一起使用。ROS易于与其他机器人软件框架集成:ROS已与OpenRAVE,Orocos和Player集成。
-
语言独立性:包括Java,C++,Python等。为了支持更多应用开发和移植,ROS设计为一种语言弱相关的框架结构,使用简洁,中立的定义语言描述模块间的消息接口,在编译中再产生所使用语言的目标文件,为消息交互提供支持,同时允许消息接口的嵌套使用
-
易于测试:ROS具有称为rostest的内置单元/集成测试框架,可轻松安装和拆卸测试工具。
-
大型应用:ROS适用于大型运行时系统和大型开发流程。
-
丰富的组件化工具包:ROS可采用组件化方式集成一些工具和软件到系统中并作为一个组件直接使用,如RVIZ(3D可视化工具),开发者根据ROS定义的接口在其中显示机器人模型等,组件还包括仿真环境和消息查看工具等
-
免费且开源:开发者众多,功能包多
1.3 ROS发展历程
-
ROS是一个由来已久、贡献者众多的大型软件项目。在ROS诞生之前,很多学者认为,机器人研究需要一个开放式的协作框架,并且已经有不少类似的项目致力于实现这样的框架。在这些工作中,斯坦福大学在2000年年中开展了一系列相关研究项目,如斯坦福人工智能机器人(STandford AI Robot, STAIR)项目、个人机器人(Personal Robots, PR)项目等,在上述项目中,在研究具有代表性、集成式人工智能系统的过程中,创立了用于室内场景的高灵活性、动态软件系统,其可以用于机器人学研究。
-
2007年,柳树车库(Willow Garage)提供了大量资源,用于将斯坦福大学机器人项目中的软件系统进行扩展与完善,同时,在无数研究人员的共同努力下,ROS的核心思想和基本软件包逐渐得到完善。(2010 ROS元年)
-
ROS的发行版本(ROS distribution)指ROS软件包的版本,其与Linux的发行版本(如Ubuntu)的概念类似。推出ROS发行版本的目的在于使开发人员可以使用相对稳定的代码库,直到其准备好将所有内容进行版本升级为止。因此,每个发行版本推出后,ROS开发者通常仅对这一版本的bug进行修复,同时提供少量针对核心软件包的改进。
-
版本特点: 按照英文字母顺序命名,ROS 目前已经发布了ROS1 的终极版本: noetic,并建议后期过渡至 ROS2 版本。noetic 版本之前默认使用的是 Python2,noetic 支持 Python3。
建议版本: noetic 或 melodic 或 kinetic

2 ROS安装
我们使用的是 ROS 版本是 Noetic,那么可以在 ubuntu20.04、Mac 或 windows10 系统上安装,虽然一般用户平时使用的操作系统以windows居多,但是ROS之前的版本基本都不支持windows,所以当前我们选用的操作系统是 ubuntu,以方便向历史版本过渡。ubuntu安装常用方式有两种:
-
实体机安装 ubuntu (较为常用的是使用双系统,windows 与 ubuntu 并存);
-
虚拟机安装 ubuntu。
两种方式比较,各有优缺点:
- 方案1可以保证性能,且不需要考虑硬件兼容性问题,但是和windows系统交互不便;
- 方案2可以方便的实现 windows 与 ubuntu 交互,不过性能稍差,且与硬件交互不便。
在 ROS 中,一些仿真操作是比较耗费系统资源的,且经常需要和一些硬件(雷达、摄像头、imu、STM32、arduino....)交互,因此,原则上建议采用方案1(工作),不过如果只是出于学习目的,那么方案2也基本够用,且方案2在windows与ubuntu的交互上更为方便,对于学习者更为友好,因此本教程在此选用的是方案2。当然,具体采用哪种实现方案,请按需选择。
如果采用虚拟机安装 ubuntu,再安装 ROS 的话,大致流程如下:
- 安装虚拟机软件(比如:virtualbox 或 VMware);
- 使用虚拟机软件虚拟一台主机;
- 在虚拟主机上安装 ubuntu 20.04;
- 在 ubuntu 上安装 ROS;
- 测试 ROS 环境是否可以正常运行。
2.1 ROS安装
ROS安装、测试 http://t.csdn.cn/LDkvp
配置环境变量,方便在任意 终端中使用 ROS。
- echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
- source ~/.bashrc
3 ROS快速体验
编写 ROS 程序,在控制台输出文本: Hello World,分别使用 C++ 和 Python 实现。
3.1 HelloWorld实现
ROS中的程序即便使用不同的编程语言,实现流程也大致类似,以当前HelloWorld程序为例,实现流程大致如下:
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;(.cpp .py)
- 编辑配置文件;
- 编译并执行。
3.1.1 创建工作空间并初始化
- mkdir -p 自定义空间名称/src
- cd 自定义空间名称
- catkin_make
mkdir -p :递归创建目录,即使上级目录不存在,会按目录层级自动创建目录
上述命令,首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make命令编译。【注意这里不要进入anaconda虚拟环境下】
3.1.2 进入 src 创建 ros 包并添加依赖
- cd src
- catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。
catkin_create_pkg 是创建功能包
注意: 在ROS中,虽然实现同一功能时,C++和Python可以互换,但是具体选择哪种语言,需要视需求而定,因为两种语言相较而言:C++运行效率高但是编码效率低,而Python则反之,基于二者互补的特点,ROS设计者分别设计了roscpp与rospy库,前者旨在成为ROS的高性能库,而后者则一般用于对性能无要求的场景,旨在提高开发效率。
3.2 HelloWorld(C++版)
本节内容基于3.1,假设你已经创建了ROS的工作空间,并且创建了ROS的功能包,那么就可以进入核心步骤了,使用C++编写程序实现:
3.2.1 进入 ros 包的 src 目录编辑源文件
cd /home/gdan/data/code/ros/demo01_ws/src/helloworld/src
C++源码实现(文件名自定义)
- //1. 包含ros的头文件
- #include "ros/ros.h"
-
- // 2. 编写 main 函数
- int main(int argc, char *argv[])
- {
- //3. 初始化 ros 节点
- ros::init(argc,argv,"hello");
- //创建 ros 节点句柄(非必须)
- ros::NodeHandle n;
- //4. 输出日志
- ROS_INFO("hello world!");
-
- return 0;
- }
3.2.2 编辑 helloworld 包下的配置文件 Cmakelist.txt文件
- add_executable(步骤3的源文件名
- src/步骤3的源文件名.cpp
- )
- target_link_libraries(步骤3的源文件名
- ${catkin_LIBRARIES}
- )

3.2.3 进入工作空间目录并编译
- cd 自定义空间名称
- catkin_make
生成 build devel ....
3.2.4 执行
先启动命令行1:
roscore
再启动命令行2:
- cd 工作空间
- source ./devel/setup.bash
- rosrun 包名 C++节点

source ./devel/setup.bash 是刷新当前的环境变量,而且只能是当前窗口有效。
解决办法:
在home目录下ctrl+h,显示隐藏目录

添加一行
echo "source /home/gdan/data/code/ros/demo01_ws/devel/setup.bash" >> ~/.bashrc
这样就可以在任意窗口执行: rosrun 包名 C++节点
3.3 HelloWorld(Python版)
本节内容基于3.1,假设你已经创建了ROS的工作空间,并且创建了ROS的功能包,那么就可以进入核心步骤了,使用Python编写程序实现:
3.3.1.进入 ros 包添加 scripts 目录并编辑 python 文件
- cd ros包
- mkdir scripts
新建 python 文件: (文件名自定义)
- #! /usr/bin/env python
- ## 指定解释器
-
- """
- Python 版 HelloWorld
- """
- # 1.导包
- import rospy
-
- # 2.主入口
- if __name__ == "__main__":
- # 3. 初始化 ros 节点
- rospy.init_node("Hello")
- # 4. 输出日志
- rospy.loginfo("Hello World!!!!")


3.3.2.为 python 文件添加可执行权限
chmod +x 自定义文件名.py
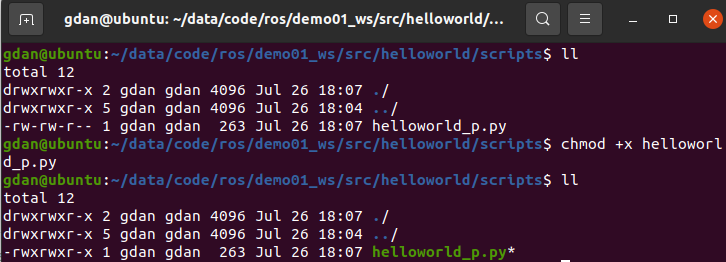
-rw-rw-r--: 这是文件的权限标志。它以10个字符组成,表示了该文件对所有用户的访问权限。具体解释如下:
- 第一个字符表示文件类型。这里是
-,表示它是一个普通文件。- 后续的三个字符
rw-表示所有者(gdan)对该文件的权限,其中r表示可读,w表示可写,-表示不可执行。- 接下来的三个字符
rw-表示与所有者同一组的其他用户对该文件的权限。- 最后的三个字符
r--表示其他用户对该文件的权限。1: 表示该文件的硬链接计数。在这种情况下,它只有一个硬链接。gdan gdan: 分别表示文件的所有者和所属组。263: 表示文件的大小(以字节为单位)。Jul 26 18:07: 表示文件的最后修改时间。总结:该文件名为"helloworld_p.py",它是一个普通文件,拥有所有者和所属组的读写权限,其他用户只有读取权限。文件大小为263字节,最后修改时间为7月26日18:07。
3.3.3.编辑 ros 包下的 CamkeList.txt 文件
- catkin_install_python(PROGRAMS scripts/自定义文件名.py
- DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
- )

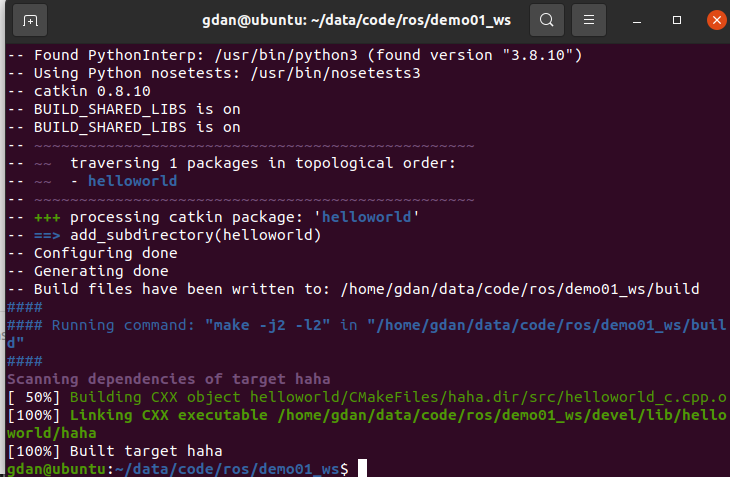
3.3.4.进入工作空间目录并编译
- cd 自定义空间名称
- catkin_make
3.3.5.进入工作空间目录并执行
先启动命令行1:
roscore
roscore只能在一个窗口里面放着
再启动命令行2:
- cd 工作空间
- source ./devel/setup.bash
- rosrun 包名 自定义文件名.py
4. ROS集成开发环境搭建
4.1 安装终端

- 安装
sudo apt install terminator
- 添加到收藏夹
显示应用程序 ---> 搜索 terminator ---> 右击 选择 添加到收藏夹
-
Terminator 常用快捷键
第一部份:关于在同一个标签内的操作
Alt+Up //移动到上面的终端
Alt+Down //移动到下面的终端
Alt+Left //移动到左边的终端
Alt+Right //移动到右边的终端
Ctrl+Shift+O //水平分割终端
Ctrl+Shift+E //垂直分割终端
Ctrl+Shift+Right //在垂直分割的终端中将分割条向右移动
Ctrl+Shift+Left //在垂直分割的终端中将分割条向左移动
Ctrl+Shift+Up //在水平分割的终端中将分割条向上移动
Ctrl+Shift+Down //在水平分割的终端中将分割条向下移动
Ctrl+Shift+S //隐藏/显示滚动条
Ctrl+Shift+F //搜索
Ctrl+Shift+C //复制选中的内容到剪贴板
Ctrl+Shift+V //粘贴剪贴板的内容到此处
Ctrl+Shift+W //关闭当前终端
Ctrl+Shift+Q //退出当前窗口,当前窗口的所有终端都将被关闭
Ctrl+Shift+X //最大化显示当前终端
Ctrl+Shift+Z //最大化显示当前终端并使字体放大
Ctrl+Shift+N or Ctrl+Tab //移动到下一个终端
Ctrl+Shift+P or Ctrl+Shift+Tab //Crtl+Shift+Tab 移动到之前的一个终端
第二部份:有关各个标签之间的操作
F11 //全屏开关
Ctrl+Shift+T //打开一个新的标签
Ctrl+PageDown //移动到下一个标签
Ctrl+PageUp //移动到上一个标签
Ctrl+Shift+PageDown //将当前标签与其后一个标签交换位置
Ctrl+Shift+PageUp //将当前标签与其前一个标签交换位置
Ctrl+Plus (+) //增大字体
Ctrl+Minus (-) //减小字体
Ctrl+Zero (0) //恢复字体到原始大小
Ctrl+Shift+R //重置终端状态
Ctrl+Shift+G //重置终端状态并clear屏幕
Super+g //绑定所有的终端,以便向一个输入能够输入到所有的终端
Super+Shift+G //解除绑定
Super+t //绑定当前标签的所有终端,向一个终端输入的内容会自动输入到其他终端
Super+Shift+T //解除绑定
Ctrl+Shift+I //打开一个窗口,新窗口与原来的窗口使用同一个进程
Super+i //打开一个新窗口,新窗口与原来的窗口使用不同的进程
4.2 安装VScode
4.4.1 下载与安装
看网上
4.4.2 vscode 集成 ROS 插件
使用 VScode 开发 ROS 程序,需要先安装一些插件,常用插件如下:

4.4.3 vscode 使用_基本配置
4.4.3.1 创建 ROS 工作空间
- mkdir -p xxx_ws/src(必须得有 src)
- cd xxx_ws
- catkin_make
4.4.3.2 启动vscode
进入 xxx_ws 启动 vscode
- cd xxx_ws
- code .
一般有这些默认的文件

4.4.3.3 vscode 中编译 ros
快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build
可以点击配置设置为默认,修改.vscode/tasks.json 文件
- {
- // 有关 tasks.json 格式的文档,请参见
- // https://go.microsoft.com/fwlink/?LinkId=733558
- "version": "2.0.0",
- "tasks": [
- {
- "label": "catkin_make:debug", //代表提示的描述性信息
- "type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
- "command": "catkin_make",//这个是我们需要运行的命令
- "args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
- "group": {"kind":"build","isDefault":true},
- "presentation": {
- "reveal": "always"//可选always或者silence,代表是否输出信息
- },
- "problemMatcher": "$msCompile"
- }
- ]
- }
4.4.3.4 创建 ROS 功能包
选定 src 右击 ---> create catkin package
设置包名: hello_vscode
添加依赖:roscpp rospy std_msgs

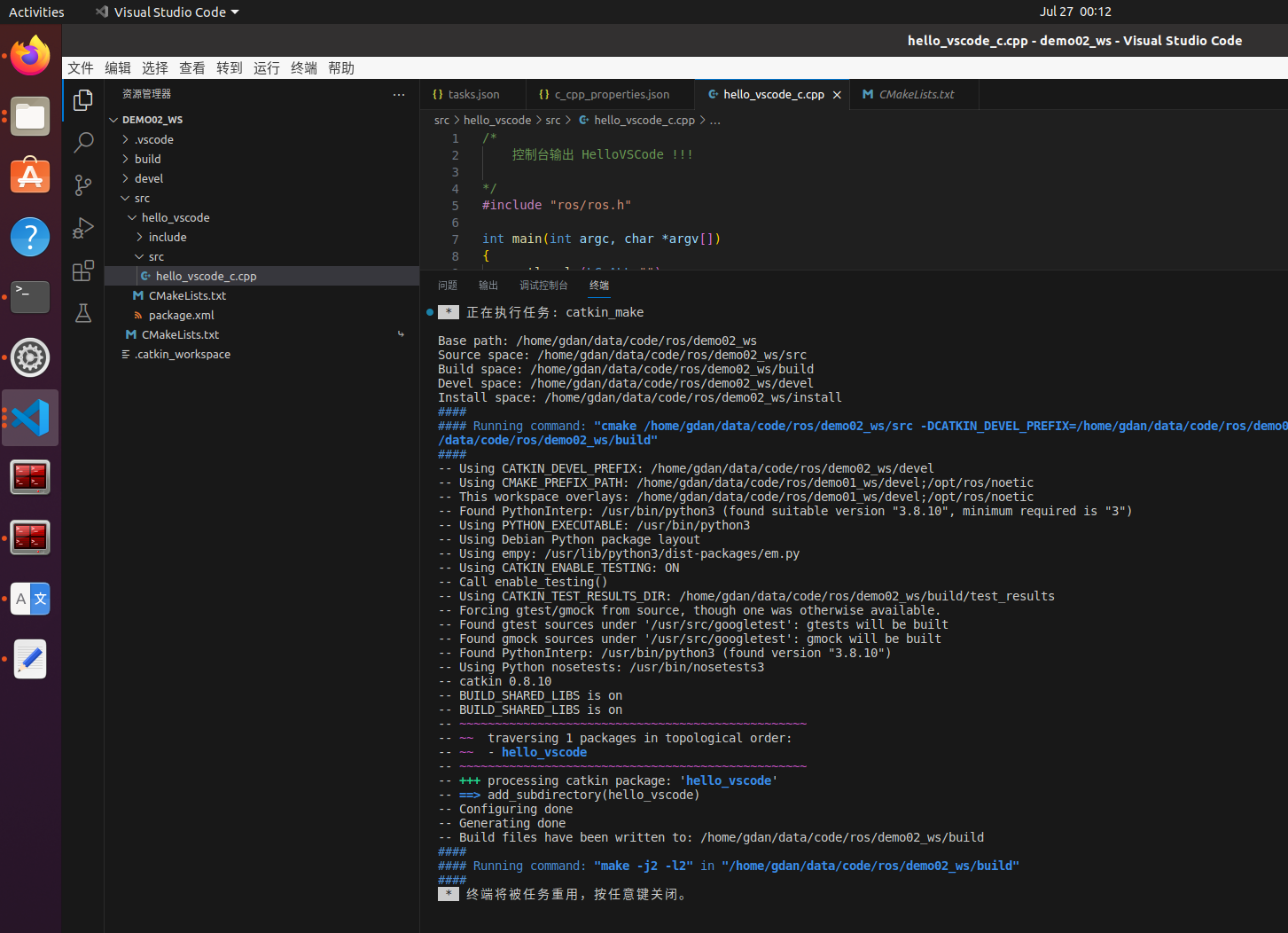
4.4.3.5 C++ 实现
在功能包的 src 下新建 cpp 文件
- /*
- 控制台输出 HelloVSCode !!!
- */
- #include "ros/ros.h"
-
- int main(int argc, char *argv[])
- {
- setlocale(LC_ALL,"");
- //执行节点初始化
- ros::init(argc,argv,"HelloVSCode");
-
- //输出日志
- ROS_INFO("Hello VSCode!!!哈哈哈哈哈哈哈哈哈哈");
- return 0;
- }
PS1: 如果没有代码提示
修改 .vscode/c_cpp_properties.json
设置 "cppStandard": "c++17"
PS2: main 函数的参数不可以被 const 修饰
此时 ctrl + shift + B , 重新编译看会不会报错
更改如下:

接着重新编译看会不会报错,接下来执行看能不能输出结果


PS3: 当ROS__INFO 终端输出有中文时,会出现乱码
INFO: ????????????????????????
解决办法:在函数开头加入下面代码的任意一句
- setlocale(LC_CTYPE, "zh_CN.utf8");
- setlocale(LC_ALL, "");
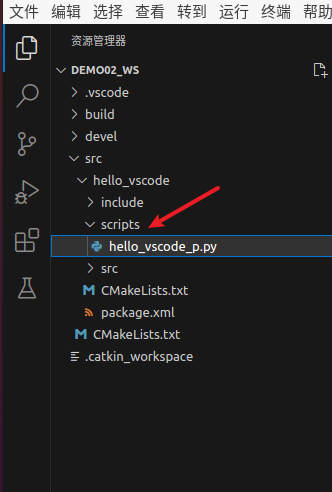
4.4.3.6 python实现
在 功能包 下新建 scripts 文件夹,添加 python 文件,并添加可执行权限
- #! /usr/bin/env python
- """
- Python 版本的 HelloVScode,执行在控制台输出 HelloVScode
- 实现:
- 1.导包
- 2.初始化 ROS 节点
- 3.日志输出 HelloWorld
- """
-
- import rospy # 1.导包
-
- if __name__ == "__main__":
-
- rospy.init_node("Hello_Vscode_p") # 2.初始化 ROS 节点
- rospy.loginfo("Hello VScode, 我是 Python ....") #3.日志输出 HelloWorld

配置文件

接着又是三个步骤:
ctrl + shift + B 编译
roscore
rosrun hello_vscode hello_vscode_p.py

如果不在 CMakeList.txt 配置文件 里面去设置python文件,会出现下面的问题:

是因为noetic使用的是python3,不用python2版本,如果在配置文件里面配置好了,会自动定位到python3版本。
解决方式:
1.第一行解释器声明,可以使用绝对路径定位到 python3 的安装路径 #! /usr/bin/python3,但是不建议
2.建议使用 #!/usr/bin/env python 但是会抛出异常 : /usr/bin/env: “python”: 没有那个文件或目录
3.解决1: #!/usr/bin/env python3 直接使用 python3 但存在问题: 不兼容之前的 ROS 相关 python 实现
4.解决2: 创建一个链接符号到 python 命令:sudo ln -s /usr/bin/python3 /usr/bin/python
4.3 launch文件演示
4.3.1 需求
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?
官方给出的优化策略是使用 launch 文件,可以一次性启动多个 ROS 节点。
4.3.2 实现
-
选定功能包右击 ---> 添加 launch 文件夹
-
选定 launch 文件夹右击 ---> 添加 launch 文件
-
编辑 launch 文件内容
- <launch>
- <node pkg="helloworld" type="demo_hello" name="hello" output="screen" />
- <node pkg="turtlesim" type="turtlesim_node" name="t1"/>
- <node pkg="turtlesim" type="turtle_teleop_key" name="key1" />
- </launch>
-
node ---> 包含的某个节点
-
pkg -----> 功能包
-
type ----> 被运行的节点文件
-
name --> 为节点命名
-
output-> 设置日志的输出目标
4. 运行 launch 文件
roslaunch 包名 launch文件名
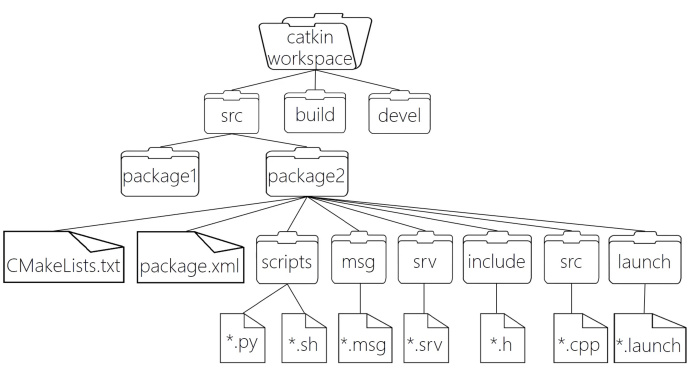
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置
4.4.1.1 package.xml
该文件定义有关软件包的属性,例如软件包名称,版本号,作者,维护者以及对其他catkin软件包的依赖性。请注意,该概念类似于旧版 rosbuild 构建系统中使用的manifest.xml文件。
- <?xml version="1.0"?>
- <!-- 格式: 以前是 1,推荐使用格式 2 -->
- <package format="2">
- <!-- 包名 -->
- <name>demo01_hello_vscode</name>
- <!-- 版本 -->
- <version>0.0.0</version>
- <!-- 描述信息 -->
- <description>The demo01_hello_vscode package</description>
-
- <!-- One maintainer tag required, multiple allowed, one person per tag -->
- <!-- Example: -->
- <!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
- <!-- 维护人员 -->
- <maintainer email="xuzuo@todo.todo">xuzuo</maintainer>
-
-
- <!-- One license tag required, multiple allowed, one license per tag -->
- <!-- Commonly used license strings: -->
- <!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
- <!-- 许可证信息,ROS核心组件默认 BSD -->
- <license>TODO</license>
-
-
- <!-- Url tags are optional, but multiple are allowed, one per tag -->
- <!-- Optional attribute type can be: website, bugtracker, or repository -->
- <!-- Example: -->
- <!-- <url type="website">http://wiki.ros.org/demo01_hello_vscode</url> -->
-
-
- <!-- Author tags are optional, multiple are allowed, one per tag -->
- <!-- Authors do not have to be maintainers, but could be -->
- <!-- Example: -->
- <!-- <author email="jane.doe@example.com">Jane Doe</author> -->
-
-
- <!-- The *depend tags are used to specify dependencies -->
- <!-- Dependencies can be catkin packages or system dependencies -->
- <!-- Examples: -->
- <!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
- <!-- <depend>roscpp</depend> -->
- <!-- Note that this is equivalent to the following: -->
- <!-- <build_depend>roscpp</build_depend> -->
- <!-- <exec_depend>roscpp</exec_depend> -->
- <!-- Use build_depend for packages you need at compile time: -->
- <!-- <build_depend>message_generation</build_depend> -->
- <!-- Use build_export_depend for packages you need in order to build against this package: -->
- <!-- <build_export_depend>message_generation</build_export_depend> -->
- <!-- Use buildtool_depend for build tool packages: -->
- <!-- <buildtool_depend>catkin</buildtool_depend> -->
- <!-- Use exec_depend for packages you need at runtime: -->
- <!-- <exec_depend>message_runtime</exec_depend> -->
- <!-- Use test_depend for packages you need only for testing: -->
- <!-- <test_depend>gtest</test_depend> -->
- <!-- Use doc_depend for packages you need only for building documentation: -->
- <!-- <doc_depend>doxygen</doc_depend> -->
- <!-- 依赖的构建工具,这是必须的 -->
- <buildtool_depend>catkin</buildtool_depend>
-
- <!-- 指定构建此软件包所需的软件包 -->
- <build_depend>roscpp</build_depend>
- <build_depend>rospy</build_depend>
- <build_depend>std_msgs</build_depend>
-
- <!-- 指定根据这个包构建库所需要的包 -->
- <build_export_depend>roscpp</build_export_depend>
- <build_export_depend>rospy</build_export_depend>
- <build_export_depend>std_msgs</build_export_depend>
-
- <!-- 运行该程序包中的代码所需的程序包 -->
- <exec_depend>roscpp</exec_depend>
- <exec_depend>rospy</exec_depend>
- <exec_depend>std_msgs</exec_depend>
-
-
- <!-- The export tag contains other, unspecified, tags -->
- <export>
- <!-- Other tools can request additional information be placed here -->
-
- </export>
- </package>
4.4.1.2 CMakelists.txt
文件CMakeLists.txt是CMake构建系统的输入,用于构建软件包。任何兼容CMake的软件包都包含一个或多个CMakeLists.txt文件,这些文件描述了如何构建代码以及将代码安装到何处。
4.4.2 ROS文件系统相关命令
ROS 的文件系统本质上都还是操作系统文件,我们可以使用Linux命令来操作这些文件,不过,在ROS中为了更好的用户体验,ROS专门提供了一些类似于Linux的命令,这些命令较之于Linux原生命令,更为简介、高效。文件操作,无外乎就是增删改查与执行等操作,接下来,我们就从这五个维度,来介绍ROS文件系统的一些常用命令。
4.4.2.1 增
catkin_create_pkg 自定义包名 依赖包 === 创建新的ROS功能包
sudo apt install xxx === 安装 ROS功能包
4.4.2.2 删
sudo apt purge xxx ==== 删除某个功能包
4.4.2.3 删
rospack list === 列出所有功能包
rospack find 包名 === 查找某个功能包是否存在,如果存在返回安装路径
roscd 包名 === 进入某个功能包
rosls 包名 === 列出某个包下的文件
apt search xxx === 搜索某个功能包
4.4.2.4.改
rosed 包名 文件名 === 修改功能包文件
需要安装 vim
比如:rosed turtlesim Color.msg
4.4.2.5 执行
4.4.2.5.1 roscore
roscore === 是 ROS 的系统先决条件节点和程序的集合, 必须运行 roscore 才能使 ROS 节点进行通信。
roscore 将启动:
-
ros master
-
ros 参数服务器
-
rosout 日志节点
用法:
roscore
Copy或(指定端口号)
roscore -p xxxx
4.4.2.5.2 rosrun
rosrun 包名 可执行文件名 === 运行指定的ROS节点
比如:rosrun turtlesim turtlesim_node
4.4.2.5.3 roslaunch
roslaunch 包名 launch文件名 === 执行某个包下的 launch 文件
4.4.3 计算图
4.4.3.1 计算图简介
前面介绍的是ROS文件结构,是磁盘上 ROS 程序的存储结构,是静态的,而 ros 程序运行之后,不同的节点之间是错综复杂的,ROS 中提供了一个实用的工具:rqt_graph。
rqt_graph能够创建一个显示当前系统运行情况的动态图形。ROS 分布式系统中不同进程需要进行数据交互,计算图可以以点对点的网络形式表现数据交互过程。rqt_graph是rqt程序包中的一部分。
4.4.3.2 计算图安装
如果前期把所有的功能包(package)都已经安装完成,则直接在终端窗口中输入
rosrun rqt_graph rqt_graph
如果未安装则在终端(terminal)中输入
- $ sudo apt install ros-<distro>-rqt
- $ sudo apt install ros-<distro>-rqt-common-plugins
请使用你的ROS版本名称(比如:kinetic、melodic、Noetic等)来替换掉<distro>。
例如当前版本是 Noetic,就在终端窗口中输入
- $ sudo apt install ros-noetic-rqt
- $ sudo apt install ros-noetic-rqt-common-plugins
4.4.3.3 计算图演示
接下来以 ROS 内置的小乌龟案例来演示计算图
首先,按照前面所示,运行案例
然后,启动新终端,键入: rqt_graph 或 rosrun rqt_graph rqt_graph,可以看到类似下图的网络拓扑图,该图可以显示不同节点之间的关系。

