
- 1[Python小项目] 从桌面壁纸到AI绘画
- 2mysql命令行下将数据导出成excel文件(.xls格式)_命令行sql结果如何保存为xlsx
- 3最终版:1分钟自动部署数字人平台并提供web服务:唇形合成(wav2lip) + 超分修复(codeformer),_android 唇形合成
- 4JumpServer堡垒机
- 5TortoiseGit 如何回退到以前的版本?_tortoisegit回退到指定版本
- 6配置IPSSL证书需要几步
- 7SpringBoot | 3.2 整合MyBatis_springboot 3.2.0 整合 mybatis-flex
- 8十四届蓝桥杯青少组选拔赛Python_2022.11.27_python现将n(3≤n≤600)根胡萝卜全部分配给黑、白、灰三只兔子,分配规则如下: 1)
- 9C++ 快速排序(左右指针法,快慢指针法,三路划分法)_快速排序快慢指针法
- 10开源的Python Web应用程序框架--Django_django开源项目
树莓派从零开始到部署计算机视觉项目(yolov8项目)第一集_树莓派如何运行yolov8
赞
踩
本人使用的是树莓派4b,但不同版本树莓派之间差异不大,本文侧重易踩坑点和主要步骤,重点在树莓派的部署,包括opencv的安装,pytorch的安装,yolo的配置等
1.无痛开机
推荐教程视频:1.树小悉入门视频
真·入门视频简单易懂
这个up同时还做了很多ai相关项目,都在github开源,很值得看
1.1.系统烧录
首先要有tf卡和读卡器,目前主流操作系统有NOOBS、Raspbian和各种Ubuntu版本等等。我选择的是Raspbian,同时也是使用最广泛的系统。
Raspberry pi OS兼容所有的树莓派版本。
1.1.1方法一:官方烧录器安装镜像(不推荐)
不推荐原因:官方烧录器会安装最新版镜像,最新版的debian12系统更换为wayland显示窗口了,最新版镜像在有些板子上会有彩屏不显实bug,需要对系统进行修改才能显示。如果想用这种办法,后面有修改方法,但没有实践过。
官方烧录器下载地址:官方烧录器
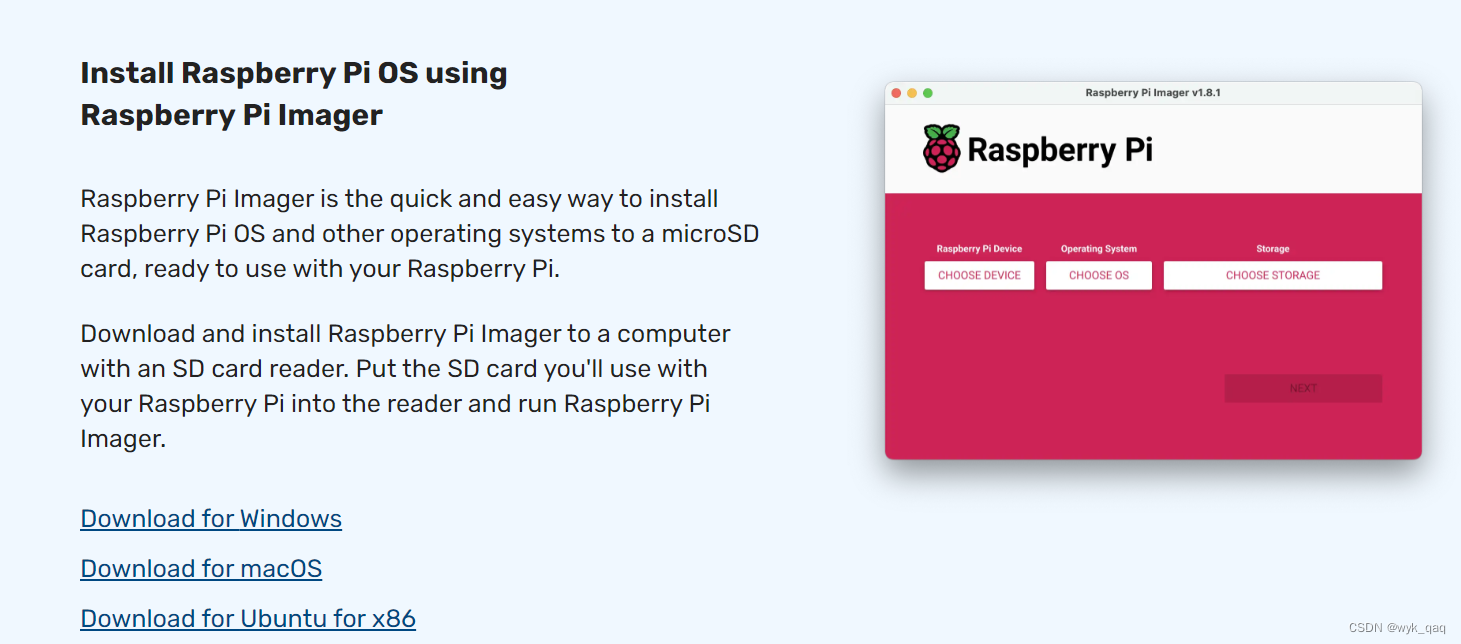
下载完成后基本就是傻瓜式点击下一步。注意有带桌面版和不带桌面版,根据自己的能力选择。然后会到这个界面 
#设置账户密码不要数字,建议纯英文。 这个账户密码也是后续ssh和VNC连接时的账户和密码 #wifi账户不能出现中文和特殊符号,wifi国家选cn,否则连不上。时区选上海可以设置系统语言
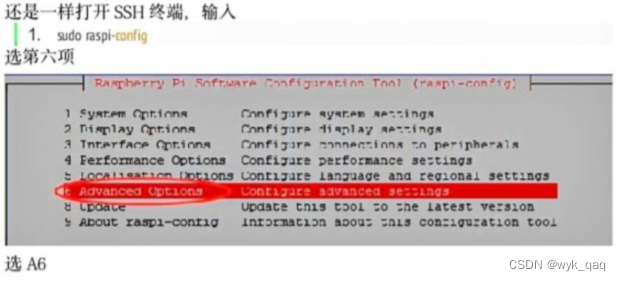
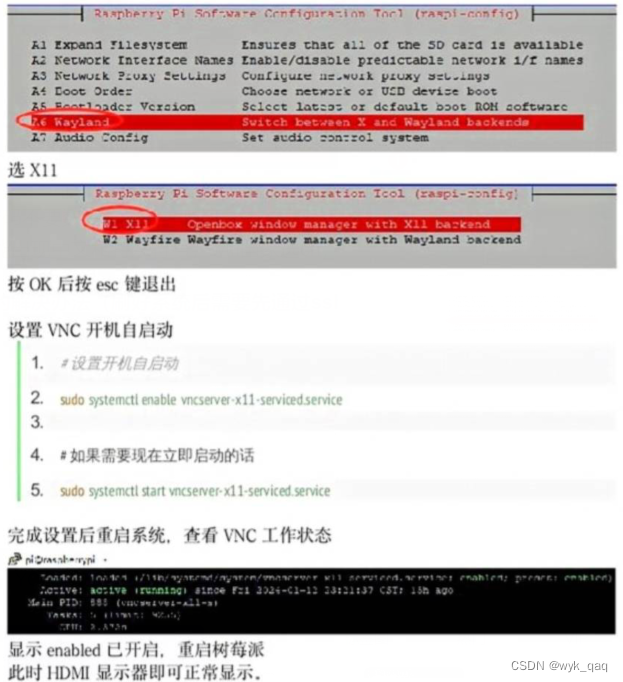
彩屏不显示的解决办法(刷好系统后需要先通过ssh连接上树莓派)
1.1.2方法二:自己下载镜像进行烧录
要做ai方面的一定要下载64位系统,实测与32位系统的处理速度差8倍,而且64位系统配置软件也很简单
镜像链接总结:提取码4464,选2023年的版本 32位提取码k9r9 64位系统 如果要用到pytorch等ai功能,就选择64位
烧录系统软件工具链接:提取码hccy
烧录完成后win系统无法识别linux'文件提醒格式化,千万不要点。
1.2树莓派开机连接(最推荐第三种无屏幕无线连接)
树莓派连接的关键点和难点是获得ip地址!
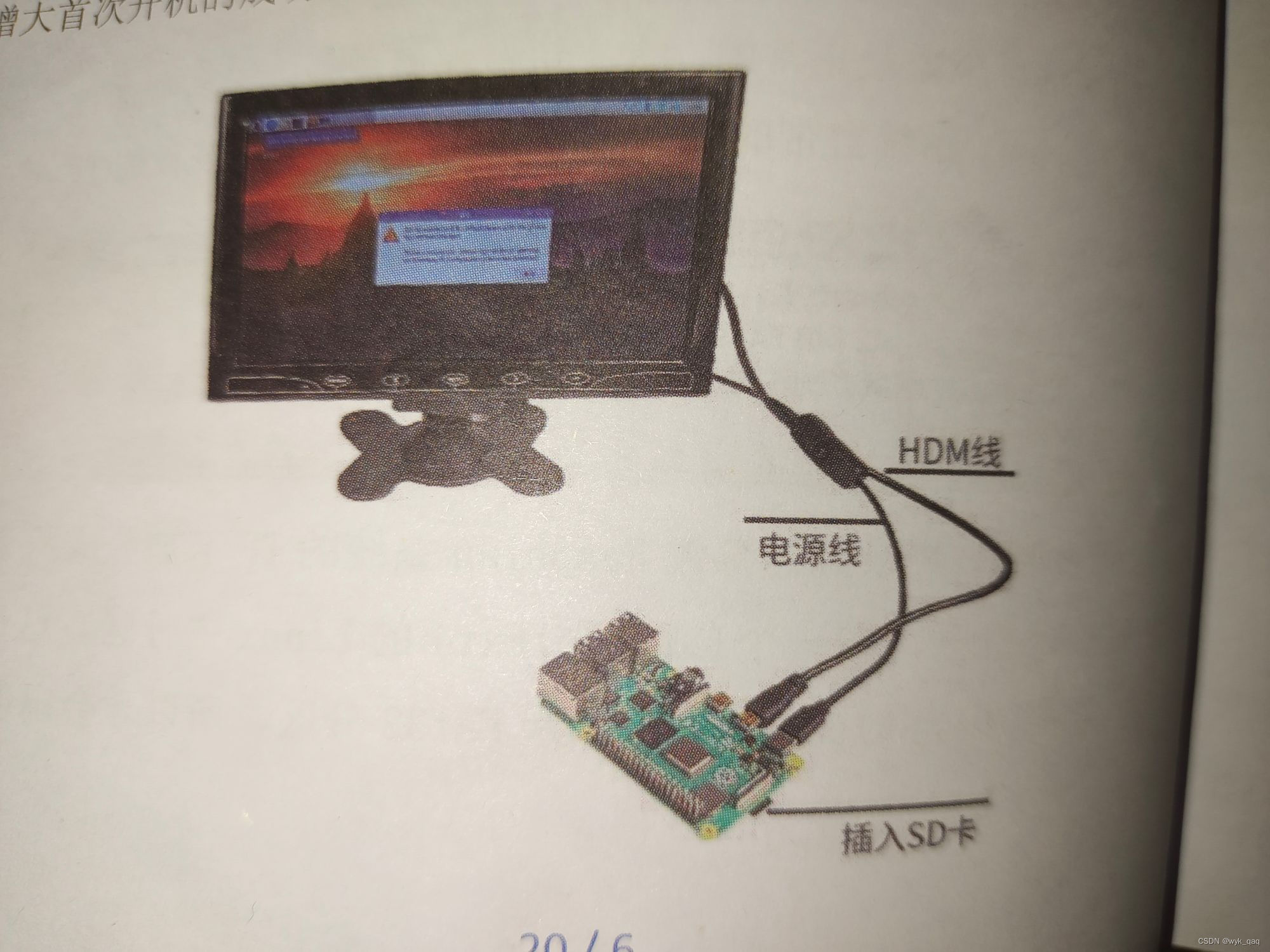
1.2.1 有屏幕连接(简单但是不方便)
应该先连接树莓派和显示器,然后再给树莓派通电。
1.2.2 无屏幕有网线连接
1, 开启ssh在sd卡的根目录(boot)中新建“SSH”文件(无后缀)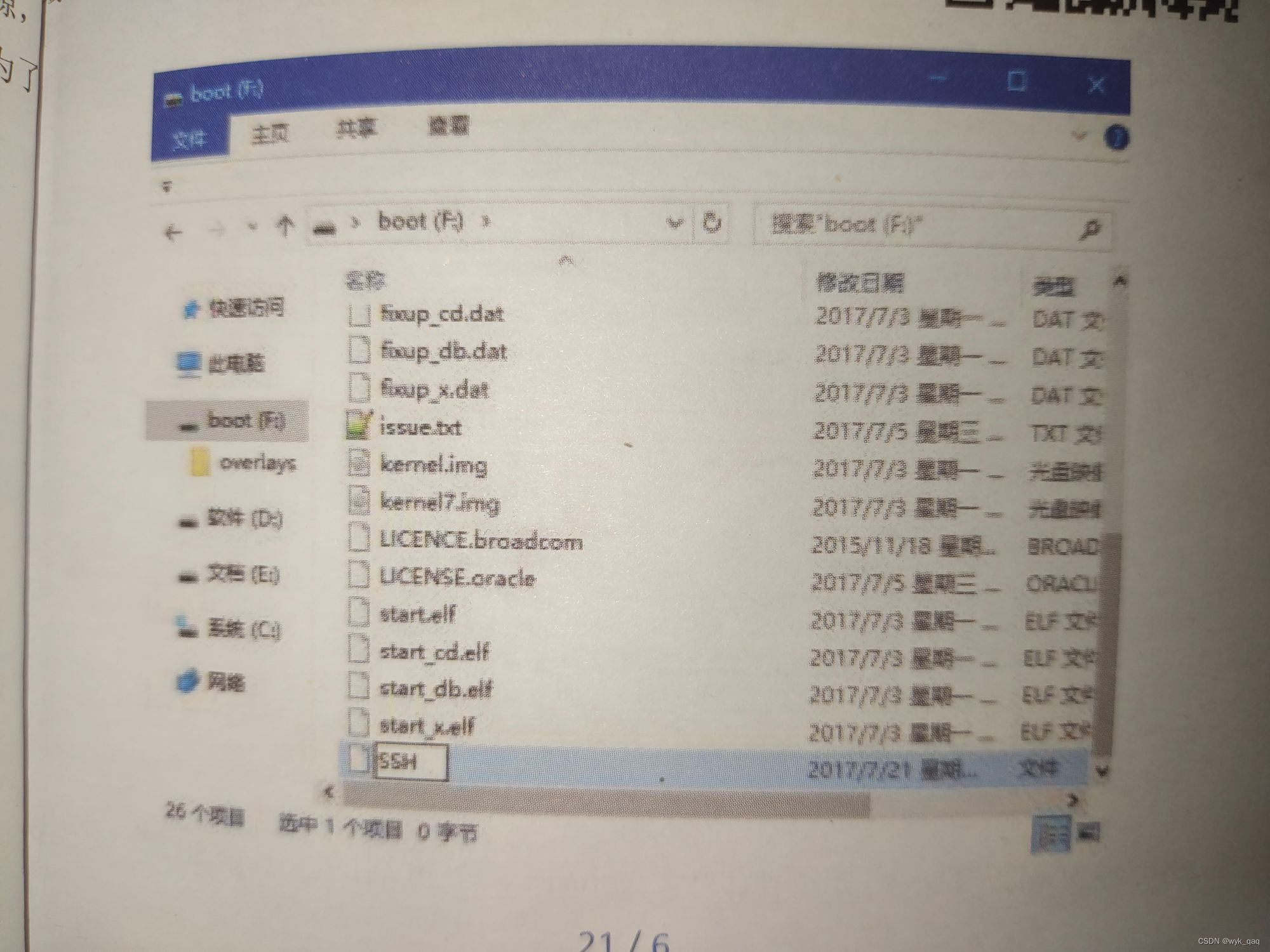
2,硬件连接并开机
3,获取树莓派的ip地址
用网线将树莓派和路由器相连(也可以和笔记本相连,通过共享网络的方法获取树莓派的ip地址,具体请百度)。连接路由器后可在后台获得树莓派的ip地址
4,使用ssh远程工具登陆树莓派
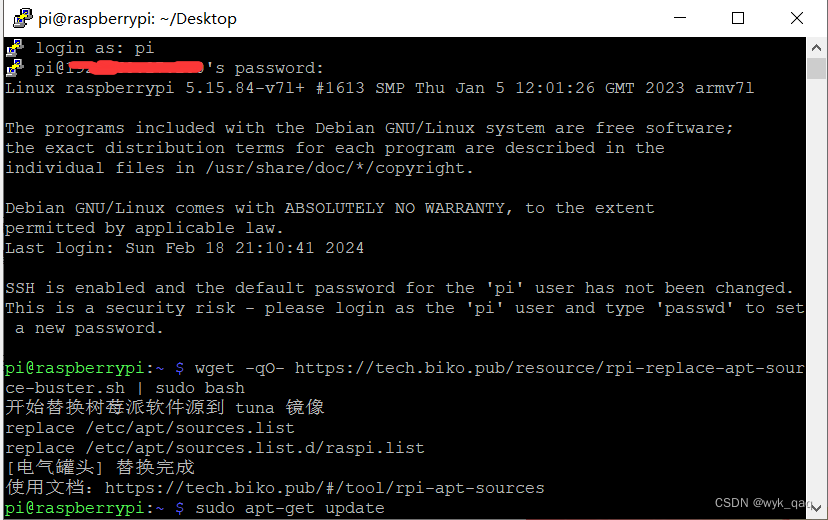
ssh客户端很多,比如putty,xshell等。甚至pycharm都可以通过ssh连接树莓派,主要的就是获取ip地址。 默认主机是pi ,密码是raspberry
使用putty登陆如图所示
1.2.3 无屏幕无线 windows远程桌面连接(推荐)
1,开启ssh(方法同上)
2,添加含有wifi信息的文件 (重点),最好使用手机热点作为树莓派连接的wifi,因为手机可以直接看到树莓派的ip地址。同时树莓派每次开机时都会自动连接wifi
在SD卡的boot分区种新建 wpa_supplicant.conf 文件,并且配置 WiFi 的 SSID 和密码,这样树莓派启动后会自行读取 wpa_supplicant.conf 配置文件连接 WiFi 设备。
配置文件的内容如下
- ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
- update_config=1
- network={
- ssid="WiFi的SSID"
- psk="WiFi密码"
- }
3,硬件连接并开机
4,看手机热点设置来获取树莓派的ip地址
5,先用putty通过ssh链接树莓派(参考上一个方法)安装相关服务
5,使用windows自带的远程桌面连接来连接树莓派
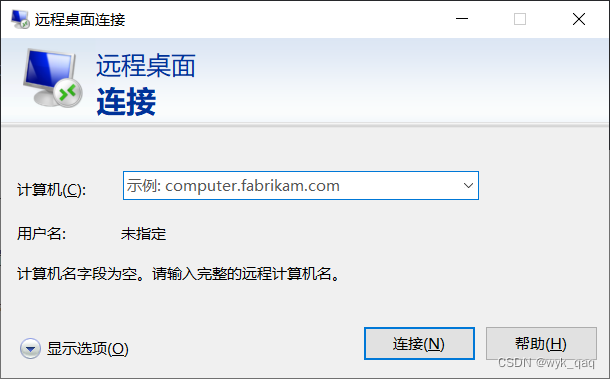
如果出现蓝屏问题请参考这篇博客:远程桌面链接蓝屏问题
至此基本工作已经准备好,汉化和设置静态ip可自己百度
2.树莓派文件结构讲解
2.1概述
树莓派的文件结构与其他Linux系统相似,但有一些特定的目录和文件适用于树莓派。以下是树莓派文件结构的概述:
-
根目录(/): 根目录是整个文件系统的顶级目录,包含所有其他目录和文件。在树莓派上,根目录通常包含以下一些重要目录和文件:
/boot:包含启动相关的文件,如内核、引导配置文件等。/bin:存放系统可执行文件,如ls、mkdir等命令。/dev:包含设备文件,用于访问系统硬件设备。/etc:存放系统配置文件。/home:用户主目录。/lib:存放系统库文件。/media:用于挂载可移动介质,如USB驱动器、光盘等。/opt:用于安装额外的可选软件包。/usr:存放用户应用程序和文件。/var:存放可变数据,如日志文件、临时文件等。
-
用户目录(/home):
/home目录是用户的主目录,每个用户通常拥有一个子目录,在这里存放用户的文件和个人设置。 -
启动目录(/boot):
/boot目录包含启动相关的文件,如内核镜像、引导配置文件config.txt和cmdline.txt等。 -
配置目录(/etc):
/etc目录包含系统的配置文件,如网络配置、软件包管理器配置、服务配置等。 -
用户数据目录(/var):
/var目录包含可变数据,例如日志文件、临时文件、邮件等。 -
用户应用程序目录(/usr):
/usr目录包含用户安装的应用程序和文件。通常情况下,系统应用程序和文件都在此目录下。 -
临时目录(/tmp):
/tmp目录用于存放临时文件和目录,通常情况下在系统重启后会被清理。
#桌面文件通常位于 /home/pi/Desktop 目录下。
#Python解释器通常位于 /usr/bin/python3。
#全局安装的python包通常位于 /usr/lib/python3/dist-packages/。
3.opencv (32位系统)
安装yolo之前必须先安装opencv和torch
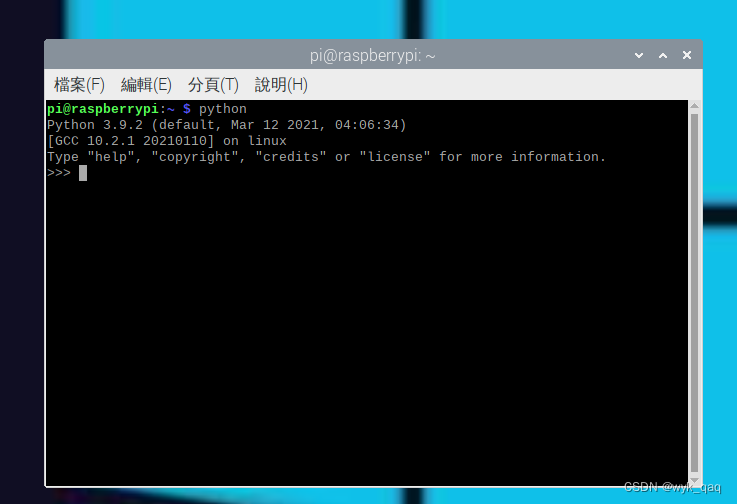
3.1查看python版本
不同Python版本搭建OpenCV环境时操作流程不一样,所以一定要注意版本
我是用的是3.9.2版本py
3.2配置摄像头,打开树莓派开关
安装及配置参考视频: https://b23.tv/mOfipLC
3.3 更新源
终端分步输入命令
- wget -qO- https://tech.biko.pub/resource/rpi-replace-apt-source-buster.sh | sudo bash
-
- sudo apt-get update
-
- sudo apt-get upgrade
3.4opencv安装前其他软件的安装
- sudo apt-get install libatlas-base-dev
-
- sudo apt-get install libjasper-dev
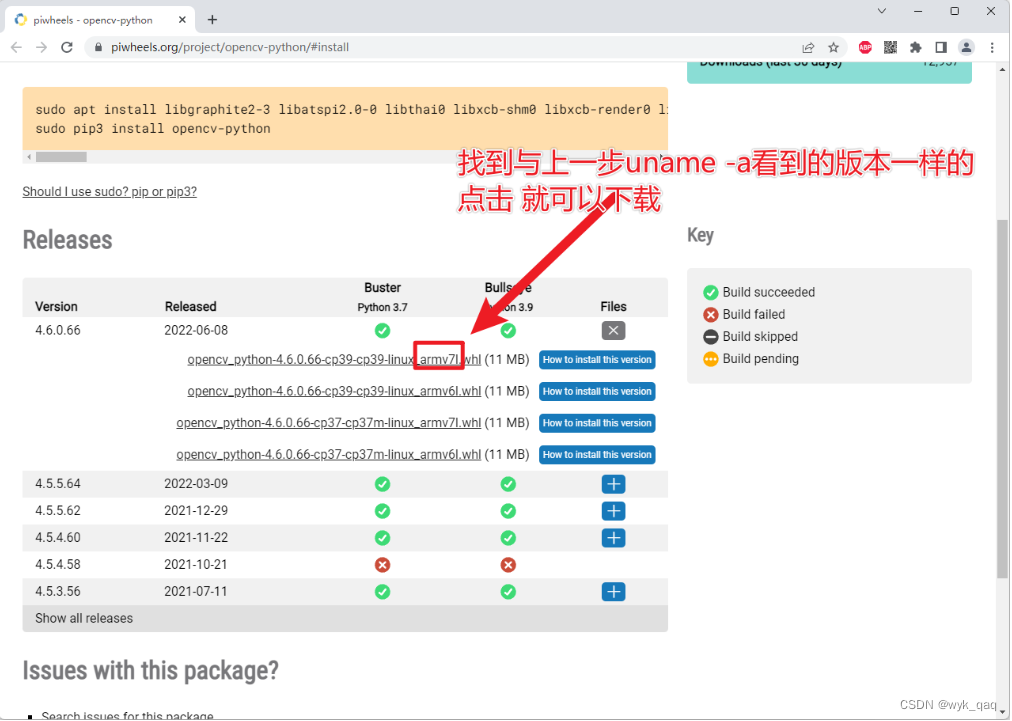
3.5 查看自己树莓派的版本
在终端输入命令uname -a
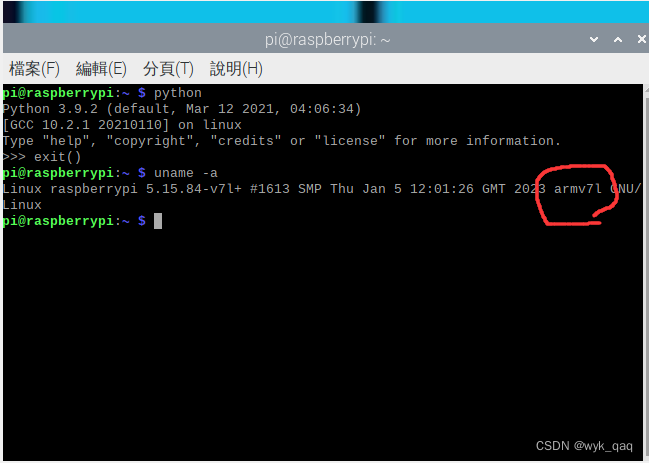
3.6根据刚刚查到的信息下载对应自己树莓派版本的opencv
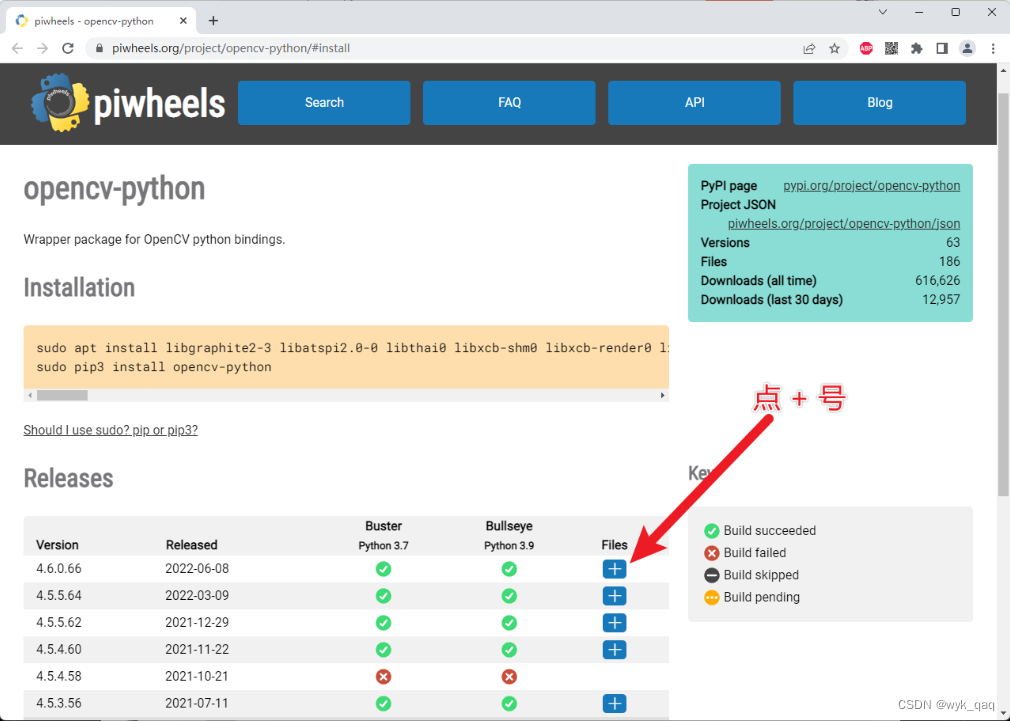
3.7 传送到树莓派
使用u盘也好,远程传送也好,把刚刚下载的文件传送到树莓派的桌面上。
3.8 安装opencv
cd Desktop跳转到桌面
pip install opencv_python-4.6.0.66-cp39-cp39-linux_armv7l.whl记得替换成自己下载的文件名
sudo apt-get install ninja-build patchelf
安装依赖项
sudo apt-get install cmake
安装Cmake
pip install -U numpy必须得更新numpy版本
3.9 测试
输入 python
然后输入 import cv2
无报错就算成功
4.opencv (64位系统)
比32位系统简单的多
1,直接运行
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple2,直接运行
pip install numpy --upgrade -i https://pypi.tuna.tsinghua.edu.cn/simple3,测试
- import cv2
-
- cv2.__version__
5.pytorch(64和32)
6.yolov8配置
放在下一集

